Изобретение относится к транспортным установкам для вертикального перемещения грузов и может найти применение в системах управления ковшовыми элеваторами и т.д.
Известен способ управления скоростью транспортирования, содержащий включение приводов в соответствии с тяговым усилием, измерение фактической скорости объекта, сравнение ее с требуемой скоростью и регулирование сигналом разности этих скоростей тягового усилия приводов.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является способ управления скоростью транспортирования, заключающийся в задании эталонной скорости транспортирования, измерении фактической скорости транспортирования, сравнении измеренной скорости с эталонной и, по результатам сравнения, формировании сигнала управления скоростью транспортирования.
Недостатком известных способов, как аналога, так и прототипа (при использовании для управления скоростью транспортирования тягового орга На, Снабженного грузонесущими элементами) является низкая точностью управления,обусловленная тем, что фактическая скорость тягового органа (грузонесущего элемента) при обрыве грузонесущих элементов не является фактической скоростью транспортирования.
Известен ковшовый элеватор, включающий в себя тяговый орган, с жестко закрепленными грузонесущими элементами (ковшами), расположенный на барабанах, один из которых соединен с приводом.
Недостатком элеватора является потеря произзодительности, вызванная отрывом грузонесущих элементов при работе.
Цель изобретения - повышение точности управления.
Поставленная цель достигается тем, что в способе управления скоростью транспор Ч
ел
xj Ю XJ W
тирования, заключающемся в задании эталонной скорости транспортирования, измерении фактической скорости транспортирования, задают количество грузонесущих элементов на тяговом органе, вычисляют отношение заданного и фактического количеств грузонесущих элементов, умножают эталонную скорость на вычисленное отношение, сравнивают полученное произведение с фактической скоростью транспортирования, и по сигналу рассогласования, производятНрГегулирование скорости транспортирования.
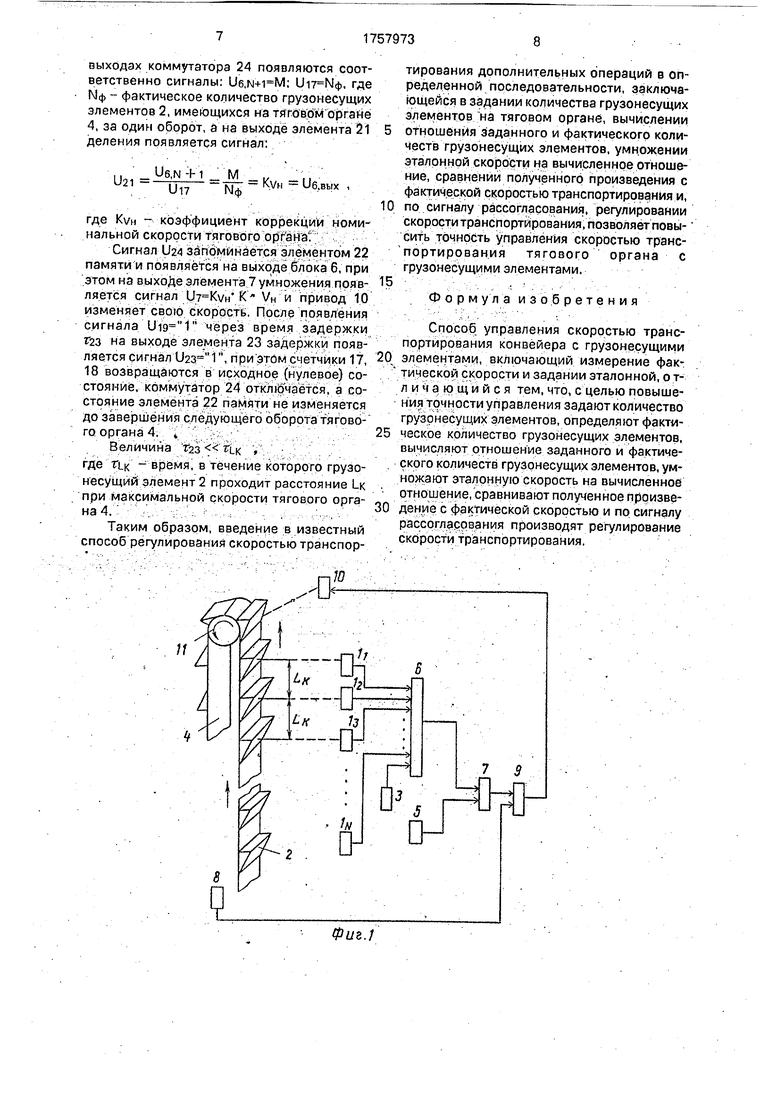
На фиг. 1 приведена функциональная схема устройства, реализующая способ управления скоростью транспортирования; на фиг,2 - функциональная схема блока вычисления.
Известно, что производительность Q элеватора определяется:
V
Q 3,6 icyt7I/Vгде 10 - геометрический полезный объем одного грузонес,ущего элемента;
р - плотность перемещаемого материала;
1р- коэффициент наполнения ковшей;
V - скорость транспортирования грузонесущих элементов;
Lm - шаг размещения грузбнесущих элементов.
Пусть мы имеем М (заданное количество) грузонесущих элементов с Lm. Тогда при потере, например, j грузонесущих элементов ,2,3М), т.е. при фактическом количестве Мф грузонесущих элементов фактический средний шаг определяется по формуле:
i ж- м -I LM ТТГ Lm
Ыф
или
. Е-щф Мф U, Отсюда фактическая производительность Оф определяется по формуле:
„ п Мф Оф гдеОм - производительность элеватора при наличии М грузонесущих элементов.
Устройство, реализующее способ содержит (см. фиг 1) путевые выключатели 11,12.. ,1м, где N - заране е заданное число,
равное допустимому числу последовательно отсутствующих грузонесущих элементов 2, задатчик 3 числа М, где М - число грузонесущих элементов 2, размещаемых на тяговом органе 4, задатчик 5 эталонной скорости V3r тягового органа 4, блок 6 вычисления, элементы 7 умножения, датчик 8 текущей скорости /4тек тягового органа 4, регулирующий элемент 9, привод 10 при0 водного барабана 11.
Путевые выключатели 1i,l2IN размещены со сдвигом друг относительно друга (на расстояние к, где LK - расстояние между двумя соседними грузонесущйми эле5 ментами 2 на тяговом органе 4) вдоль тягового органа 4. Прямые выхода путевых выключателей 11,121м соединены с первыми N входами блока 6 вычисления, (N+1)- ый вход которого соединен с выходом
0 задатчика 3 числа М, а выход - с первым множительным входом элемента 7 умножения, выход которого соединен с задающим входом регулятора 9, выход задатчика 5 эталонной скорости соединен со вторым мно5 жительным входом элемента 7 умножения, выход датчика 8 текущей скорости /4тек соединен со сравнивающим входом регулятора 9, выход которого соединен с приводом 10, механические связанным с приводным
0 барабаном 11, на котором и на натяжном барабане (на чертеже условно не показан) размещен тяговый орган 4 с грузонесущйми элементами 2.
Блок б вычисления содержит (см,фиг,2)
5 элементы ИЛИ 12, И 13, 14, формирователи 15,16 импульсных сигналов, счетчики 17,18, нуль-орган 19, элементы 20 сравнения, 21 деления, 22 памяти, 23 задержки сигнала, коммутатор 24, при этом первый вход блока
0 6 соединен с первыми входами элементов
ИЛИ 12, И 13, второй, третийN-ый входа
блока б соединены соответственно со вторым, третьим,..„N-ым входами элемента ИЛИ 12, выход которого соединен со входом
5 формирователя 16 и со вторым входом элемента И 13, выход которого соединен со входом формирователя 1-5, выхода формирователей 15, 16 соединены со счетными (первыми) входами счетчиков 17,18 соответ0 ственно, установочные (вторые) входа которых соединены со входом элемента 23 задержки сигнала, выход счетчика 17 соединен с первым входом элемента 20 сравнения и со вторым информационным входом
5 нуль-органа 19, а также и со вторым входом элемента 20 сравнения, (М+1)-й вход блока 6 соединен с первым информационным входом коммутатора 24 и со вторым входом нуль-органа 19, выход которого соединен с первым входом элемента И 14 и со входом
элемента 23 задержки сигнала, выход элемента 20 сравнения соединен со вторым входом элемента И 14, выход которого соединен с управляющим входом коммутатора 24, первый и второй информационные выхода коммутатора 24 соединены соответственно с делимым и делительным входами элемента 21 деления, выход элементе 21 деления соединен с входом элемента 22 памяти, выход которого является выходом блока 6 вычисления.
В предлагаемом способе с помощью за- датчика 5 задают V3r тягового органа 4 (т.е. грузонесущих элементов 2, так как они жестко закрепляются на тяговом органе 4), с помощью датчика 8 измеряют текущую (фактическую) скорость /4тек тягового органа 4, с помощью путевых выключателей 1, задатчика 3 числа М (где М - число грузонесущих элементов 2, размещаемых на тяговом органе 3) и блока вычисления 6
М производят вычисление отношения -гг- , с
помощью элемента 7 умножения производят вычисление произведения V3
М
/эт Щ u помощью регулирующего элемента 9 произМ
водят сравнение /4тек и VST тт- и по результатам сравнения вырабатывают сигнал регулирования на привод 10 приводного барабана 11 (т.е. производят регулирование скорости транспортирования, так как для поддержания равенства необходимо, чтобы Уф при потере j грузонесущих элементов была равна.
эт
М Щ
Устройство, реализующее способ управления скоростью транспортирования, работает следующим образом.
При включении питания на выходе задатчика 5 имеется сигнал: V3T, где К - коэффициент пропорциональности; на выходе блока 6 вычисления - на выходе элемента 7 умножения - Us 1 К-Уэт К V3T, поступающий на задающий вход регулятора 9, а таке как на выходе датчика 8 имеется (до начала работы привода 10) сигнал , то на выходе регулятора 9 имеется сигнал Удмакс поступающий на привод 10, который при этом начинает вращаться. Вращение привода 10 передает- ся барабану 11, скорость вращения которого всегда равна скорости вращения привода 10. При вращении барабана 11 перемещается тяговый орган 4, и сигнал
0
5
0
5
0
5
0
5 0 5
на выходе датчика 8 изменяется до величины /4тек, где /4тек - текущая (фактическая) скорость тягового органа 4, при этом сигнал Ug изменяется, изменение сигнала Ug происходит до тех пор. пока не будет выполнено равенство , при этом скорость /4тек тягового органа 4 равна V3T. При движении тягового органа 4 происходит перемещение грузонесущих элементов 2 вдоль путевых выключателей 1i,l2,...,lN При этом при нахождении грузонесущего элемента 2 напротив путевого выключателя 1, на его выходе имеется сигнал логической единицы (1), а при отсутствии грузонесущего элемента 2 напротив путевого выключателя 1, на его выходе имеется сигнал логического нуля (О). Сигналы с путевых выключателей 11,12,....1м поступают на первые N входа блока 6 вычисления, который работает следующим образом.
При включении питания счетчики 17, 18 известным образом устанавливаются в нулевое состояние (т.е. ), а элемент 22 памяти - в единичное состояние , на (N+1)-OM входе блока б имеется 1) Сигналы с первых N входов блока 6 поступают на входа элемента ИЛИ 12 При появлении хотя бы одного сигнала логической единицы на входах элемента ИЛИ 12 на его выходе появляется сигнал , ириэтом формирователь 16 формирует импульс, поступающий на счетный вход счетчика 18 На выходе элемента И 13 сигнал появляется при сигналах и (т.е. ). При сигнале U 1з 1 формирователь 15 формирует импульс, поступающий на счетный вход счетчика 17. Таким образом, при отсутствии грузонесущих элементов 2 (если число последовательно отсутствующих грузонесущих элементов 2 меньше N) в каждый i-ый момент времени в счетчике имеется число Nie.i, равное числу грузонесущих элементов 2, которое должно быть размещено на отрезке тягового органа 4, прошедшем мимо путевого выключателя 1 за 1-ый промежуток времени, а в счетчике 17 имеется число Мш, равное числу грузонесущих элементов 2. которое фактически размещено на этом же отрезке тягового органа 4,
При Ui8. (т.е. при полном обороте тягового органа 4 вокруг барабана 11), на выходе нуль-органа 19 появляется сигнал
U19-Т1.
На выходе элемента 20 сравнения сигнал появляется при условии
U17,U18.
При на выходе элемента И 14 появляется сигнал , при этом на первом и втором информационном
V
выходах коммутатора 24 появляются соответственно сигналы: 1)б, (j, где - фактическое количество грузонесущих элементов 2, имеющихся на типовом органе 4, за один оборот, а на выходе элемента 21 деления появляется сигнал:
.. Ue,N +1 М ,,
и21в-иТГ-авЩ Кун
U6,
вых
где KVH - коэффициент коррекции номинальной скорости тягового органа .
Сигнал U24 запоминается элементом 22 памяти и появляется на выходе блока 6, при этом на выходе элемента 7 умножения появляется сигнал VH и привод 10 изменяет свою скорость. После появления сигнала через время задержки Г23 на выходе элемента 23 задержки появляется сигнал . при этом счетчики 17, 18 возвращаются в исходное (нулевое) состояние, коммутатор 24 отключается, а состояние элемента 22 памяти не изменяется до завершения следующего оборота тягового органа 4.
Величина газ « VLK где - время, в течение которого грузо- несущий элемент 2 проходит расстояние LK при максимальной скорости тягового органа 4.
Таким образом, введение в известный способ регулирования скоростью транспор0
5
0
5
0
тирования дополнительных операций в определенной последовательности, заключающейся в задании количества грузонесущих элементов на тяговом органе, вычислении отношения заданного и фактического количеств грузонесущих элементов, умножении эталонной скорости на вычисленное отношение, сравнении полученного произведения с фактической скоростью транспортирования и, по сигналу рассогласования, регулировании скорости транспортирования, позволяет повысить точность управления скоростью транспортирования тягового органа с грузонесущими элементами.
Формула изобретения
Способ управления скоростью транспортирования конвейера с грузонесущими элементами, включающий измерение фактической скорости и задании эталонной, о т- ли чающийся тем, что, с целью повышения точности управления за да ют количество грузонесущих элементов, определяют фактическое количество грузонесущих элементов, вычисляют отношение заданного и фактического количеств грузонесущих элементов, умножают эталонную скорость на вычисленное отношение, сравнивают полученное произведение с фактической скоростью и по сигналу рассогласования производят регулирование скорости транспортирования.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости | 1989 |
|
SU1675781A1 |
| Устройство для отбора проб сыпучего материала | 1981 |
|
SU972305A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАШИНОЙ ДЛЯ НАНЕСЕНИЯ ЛИНИЙ ДОРОЖНОЙ РАЗМЕТКИ | 2001 |
|
RU2201485C2 |
| Устройство для подачи бревен в деревообрабатывающий станок | 1980 |
|
SU895657A2 |
| Устройство контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1754593A1 |
| Плужковый сбрасыватель ленточного конвейера | 1986 |
|
SU1419969A1 |
| Система управления рабочим процессом маркировочной машины | 1988 |
|
SU1581805A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1420126A1 |
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| Система автоматического управления листоформовочной машиной | 1985 |
|
SU1308499A1 |

Изобретение относится к транспортным установкам для вертикального перемещения грузов. Цель изобретения - повышение точности управления. Способ заключается в задании эталонной скорости транспортирования и числа грузонесущих элементов на тяговом органе, измерении фактической скорости транспортировании, вычислении отношения заданного и фактического количества грузонесущих элементов, умножении эталонной скорости на вычисленное отношение, сравнении полученного произведения с фактической скоростью и по сигналу рассогласования регулировании скорости транспортирования. 2 ил.
Фиг.1
/5
Фиг. 2 .
tt L 22
| ПОСЕЛЕНИЕ В КОСМОСЕ | 2002 |
|
RU2223204C2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Патент ФРГ | |||
| БЕССЕРДЕЧНИКОВЫЙ РУЛОН И СПОСОБ ЕГО ОБРАБОТКИ | 1996 |
|
RU2152752C2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
