Изобретение относится к оборудованию складов, в частности к грузоподъемным площадкам кранов-штабеле- ров.
Цель изобретения - повьшение удоб ства эксплуатации.
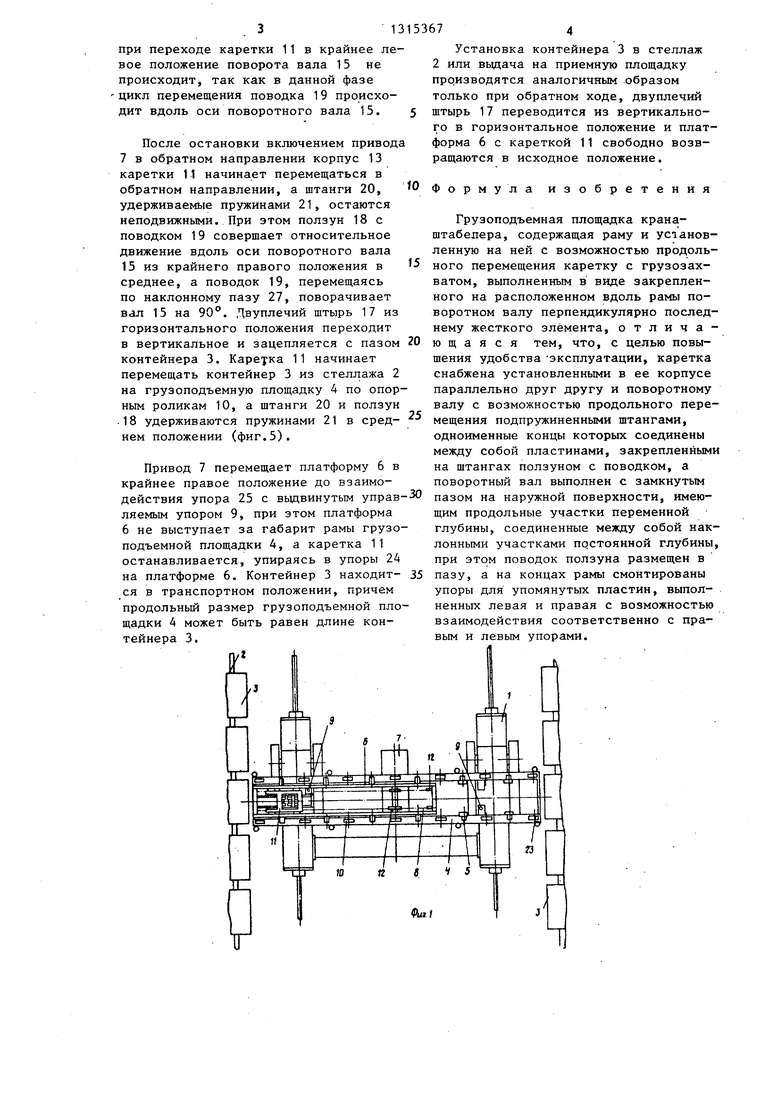
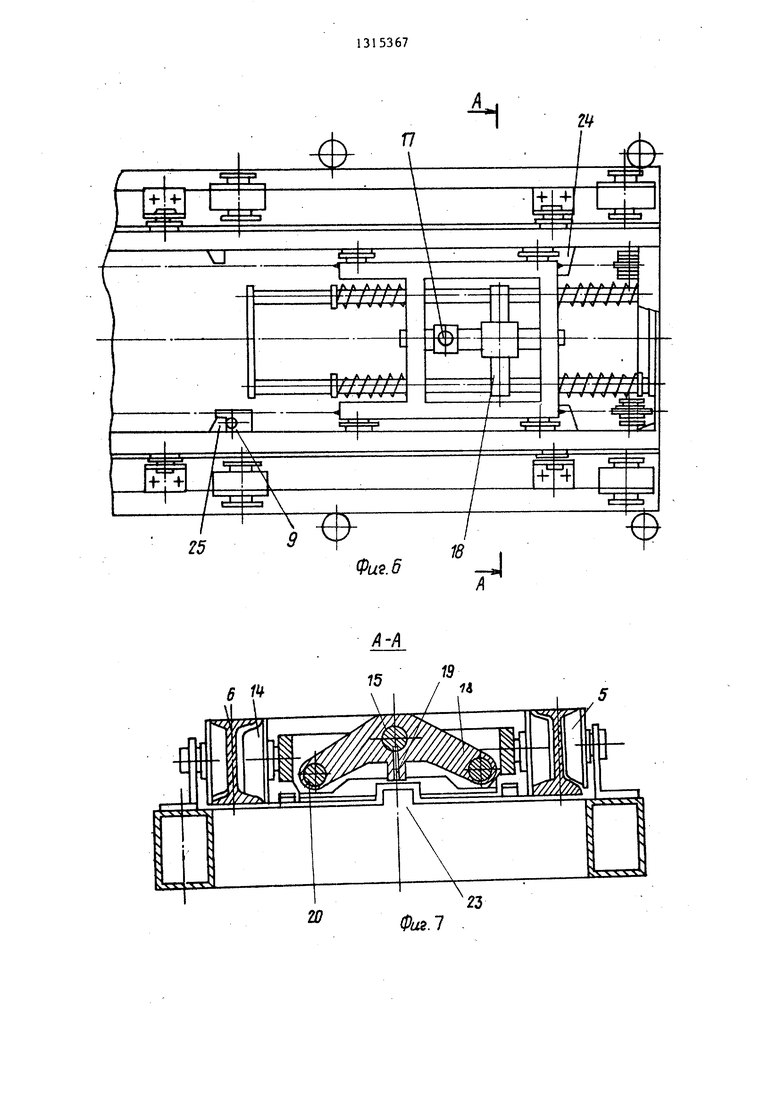
На фиг.1 показан кран-штабелер, план; на фиг.2 - грузоподъемная площадка в момент захвата контейнера из стеллажа; на фиг.З - 5 - положения каретки при захвате контейнера; на фиг,6 - каретка и контейнер в транспортном положении; на фиг,7 - разрез А-А на фиг,6; на фиг 18 - разрез Б-Б на фиг,2; на фиг,9 - разрез В-В на фиг,5; на фиг,10 - развертка по диаметру поворота вала,
Кран-штабелер 1 обслуживает двусторонние многоярусные стеллажи 2, в которых размещены контейнеры 3, и снабжен грузоподъемной площадкой 4, Содержащей направляющие ролики 5 для платформы 6, привод 7, тяговую цепь 8, управляемые упоры 9 и опорные ролики 10 для контейнеров 3,
На платформе 6 (как на направляющей) установлены каретка 11, система концевых и отклоняющих звездочек 12 для тяговой цепи 8, Каретка 11 содер жит корпус 13, вписывающийся в габаритную высоту платформы 6, На корпус 13 закреплены опорные ролики 14 и концы ветвей тяговой цепи 8, Вдоль продольной оси корпуса 13 установлен поворотный вал 15 с замкнутым лабиринтным пазом 16 и грузозахватом в виде двуплечего штыря 17, ось которого перпендикулярна оси поворота вала
15.На поворотном валу 15 установлен ползун 18с подпружиненным поводком 19. Ползун 18 неподвижно закреплен на двух штангах 20, установленных в отверстиях корпуса 13, Штанги 20 подпружинены встречными пружинами 21 удерживающими ползун 18 со штангами
20 в среднем положении. Ползун 18 имеет возможность перемещаться вдоль поворотного вала 15, причем подпружиненный поводок 19 постоянно контактирует с. замкнутым лабиринтным пазом
16,Концы щтанг 20 с каждой стороны соединены пластинами 22, снабженными вырезами для прохода через упоры 23 рамы грузоподъемной площадки 4, причем левосторонняя пластина 22 может пройти над левым упором 23 рамы грузоподъемной площадки 4 и не может пройти над правым упором 23, Эти же
O
15
0
5
5
л
35
0
45
0
55
условия обеспечены и для правосторонней пластины 22, которая проходит над над правым упором 23 и вступает в контакт с левым упором 23 рамы грузоподъемной площадки 4, Длина штанг 20 выбрана из условия размещения двуплечего штыря 17 под пазом контейнера 3 при крайнем выдвинутом положении каретки 11, На платформе 6 симметрично поперечной оси с внутренней стороны установлены упоры 24 для каретки 11 и упоры 25, взаимодействующие с управляемыми упорами 9 или с упорами 23, Замкнутый лабиринтный паз 16 состоит из четырех продольных пазов 26 переменной глубины и наклонных пазов 27 постоянной глубины. Замкнутый лабиринтный паз 16 выполнен симметричным с возможностью работы с двусторонними стеллажами.
Устройство работает следующим образом.
Грузоподъемная площадка 4 останавливается против соответствующей ячейки стеллажа 2 и включением привода 7 при помощи тяговой цепи 8, проходящей через систему звездочек 12, платформа 6 перемещается по направляющим роликам 5 в крайне выдвинутое положение до взаимодействия упоров 23 и 25, При включении привода 7 и при работе с левым стеллажом включается левый управляемый упор 9, который не препятствует перемещению платформы 6 в крайнее выдвинутое положение. Затем перемещается каретка 11, двуплечий штырь 17 которой находится в горизонтальном положении, а ползун 18 со штангами 20 удерживается встречными пружинами 21 в среднем положении. Левосторонняя пластина 22 штанг 20 свободно проходит над левым упором 23, а правосторонняя пластина 22 вступает в контакт с левьм упором 23 (фиг.З), При последующем перемещении каретки 11 до упоров 24 штанги 20 с закрепленным на них ползуном 18 и поводком 19 остаются неподвижными, а корпус 13 перемещается относительно штанг 20 и сжимает левые пружины 21 (фиг,4),
При этом ползун 18 совершает относительное движение вдоль оси поворотного вала 15, а поводок 19 перемещается по продольному пазу 26 в крайнее положение (фиг,10), соскакивая в. конце хода на более глубокий уровень наклонного паза 27. Таким образом.
при переходе каретки 11 в крайнее левое положение поворота вала 15 не происходит, так как в данной фазе цикл перемещения поводка 19 происходит вдоль оси поворотного вала 15. 5
После остановки включением привода 7 в обратном направлении корпус 13 каретки 11 начинает перемещаться в обратном направлении, а штанги 20, О удерживаемые пружинами 21, остаются неподвижными. При этом ползун 18 с поводком 19 совершает относительное движение вдоль оси поворотного вала 15 из крайнего правого положения в 5 среднее, а поводок 19, перемещаясь по наклонному пазу 27, поворачивает вал 15 на 90. Двуплечий штырь 17 из горизонтального положения переходит в вертикальное и зацепляется с пазом 20 контейнера 3. Кареука 11 начинает перемещать контейнер 3 из стеллажа 2 на грузоподъемную площадку 4 по опорным роликам 10, а штанги 20 и ползун
Установка контейнера 3 в стеллаж 2 или выдача на приемную площадку прризводятся аналогичным образом только при обратном ходе, двуплечий штырь 17 переводится из вертикального в горизонтальное положение и плат- Форма 6 с кареткой 11 свободно возвращаются в исходное положение.
Формула изобретения
Грузоподъемная площадка крана- штабелера, содержащая раму и установленную на ней с возможностью продольного перемещения каретку с грузозах- ватом, выполненным в виде закрепленного на расположенном вдоль рамы поворотном валу перпендикулярно последнему жесткого элемента, отличающаяся тем, что, с целью повышения удобства эксплуатации, каретка снабжена установленными в ее корпусе параллельно друг другу и поворотному валу с возможностью продольного пере ,„, .,..х. 11 .ivjjiojrnDdJiy i; возможностью продольного И
18 удерживаются пружинами 21 в сред- 25 мещения подпружиненными штангами.
нем положении (фиг.5).
Привод 7 перемещает платформу 6 в крайнее правое положение до взаимоодноименные концы которых соединены между собой пластинами, закрепленными на штангах ползуном с поводком, а
. „ поворотный вал выполнен с замкнутым
действия упора 25 с выдвинутым управ-30 пазом на наружной поверхности, имею- ляемым упором 9, при этом платформа щим продольные участки переменной 6 не выступает за габарит рамы грузо- глубины, соединенные между собой нак- подъемной площадки 4, а каретка 11 останавливается, упираясь в упоры 24
лонными участками постоянной глубины, при этом поводок ползуна размещен в
на платформе 6. Контейнер 3 находит- 35 пазу, а на концах рамы смонтированы
ся в транспортном положении, причем продольный размер грузоподъемной площадки 4 может быть равен длине контейнера 3.
упоры для упомянутых пластин, выполненных левая и правая с возможностью взаимодействия соответственно с правым и левым упорами.
Установка контейнера 3 в стеллаж 2 или выдача на приемную площадку прризводятся аналогичным образом только при обратном ходе, двуплечий штырь 17 переводится из вертикального в горизонтальное положение и плат- Форма 6 с кареткой 11 свободно возвращаются в исходное положение.
Формула изобретения
Грузоподъемная площадка крана- штабелера, содержащая раму и установленную на ней с возможностью продольного перемещения каретку с грузозах- ватом, выполненным в виде закрепленного на расположенном вдоль рамы поворотном валу перпендикулярно последнему жесткого элемента, отличающаяся тем, что, с целью повышения удобства эксплуатации, каретка снабжена установленными в ее корпусе параллельно друг другу и поворотному валу с возможностью продольного переDdJiy i; возможностью продольного И
мещения подпружиненными штангами.
пазом на наружной поверхности, имею- щим продольные участки переменной глубины, соединенные между собой нак-
лонными участками постоянной глубины, при этом поводок ползуна размещен в
пазу, а на концах рамы смонтированы
упоры для упомянутых пластин, выполненных левая и правая с возможностью взаимодействия соответственно с правым и левым упорами.
П 22
2/t7
20 гч
1Ъ 15 18 Фиг. 3
Фи.2
Щ 6
22
3 гЯ
20
1
г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для центрирования изделий | 1985 |
|
SU1257021A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1384503A2 |
| Склад для хранения крупногабаритных грузов | 1981 |
|
SU1018884A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU787314A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Гусеничное шасси | 1991 |
|
SU1794784A1 |
| Грузоподъемная площадка крана-штабелера | 1979 |
|
SU800069A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Грузоподъемная площадка крана-штабелера | 1979 |
|
SU918219A1 |



Изобретение относится к грузоподъемной площадке крана-штабелера. Цель изобретения - повьшение удобства эксплуатации. Площадка содержит каретку 11, на которой смонтированы подпружиненные штанги 20, соединенные по концам пластинами 22, поворотный вал 15 с грузозахватом в виде двуплечего штыря 17 и пазом 16 на наружной поверхности, который имеет продольные участки постоянной глубины и соединяющие их винтовые участки переменной глубины. Каретка 11 снабжена ползуном 18, закрепленным на штангах 20, с поводком 19, размещенным в пазу 16, При перемещении каретки 11 влево левая пластина 22 штанг проходит мимо смонтированного на оснований площадки левого упора, а правая взаимодействует с ним. При переходе каретки 11 в крайнее положение поворота вала 15 не происходит, поводок 19 скользит по продольному участку. При перемещении каретки 11 в обратном направлении корпус каретки начинает перемещаться в том же направлении, а штанги 20 остаются неподвижными. Поводок 19 перемещается по винтовому участку и поворачивает вал 15. 10 ил. (О в-в 21 ОО сл со Oi 22
Фи.6
г1
6
Фаг.
Фи..8
Редактор О.Бугир
Составитель Г.Сарьгчева
Техред И.Попович Корректор Е.Рошко
Заказ 2264/20Тираж 777 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
(риг. 10
| Грузоподъемная площадка крана- штабелера | 1978 |
|
SU740660A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
