Изобретение относится к электротехнике и может быть использовано для обеспечения синхронного вращения валов двух электродвигателей, кинематически не связанных друг с другом.
Известны устройства для управления двухдвигательными электроприводами, обеспечивающие синхронное вращение валов электродвигателей, кинематически не связанных друг с другом - авт.св. 1418883; авт.св. 984163; авт.св. 904163; авт.св. 896735.
Достижение синхронного вращения происходит за счет применения роторных обмоток, соединения обмоток электродвигателей в определенной последовательности, введение в схему полупроводниковых приборов и т.п. Ввиду высокой инертности вышеуказанных систем, трудно добиться высокой точности синхронного вращения.
Лучшими показателями в этом отношении обладают электронные устройства. Наиболее близким к предлагаемому является устройство, обеспечивающее синхронное
вращение валов двух электродвигателей, авт.св. 1372584, с датчиками частоты вращения и устройствами управления электродвигателями, а также реализующее режим автоматического поддержания синхронного вращения валов двух электродвигателей.
Недостатком известного устройства является невозможность определения конкретной величины рассогласования синхронного вращения валов двух электродвигателей и установки ее минимального значения.
Цель изобретения - повышение точности синхронного вращения валов двух электродвигателей.
Эта цель достигается тем, что разработан и введен в устройство блок управления синхронным вращением, обеспечивающий автоматическое поддержание синхронного вращения валов двух электродвигателей, позволяющий определить конкретную величину рассогласования синхронного вращения и установку ее в минимальное, для данных параметров системы, значение.
-ч о о
о ю
ICO
На чертеже приведена принципиальная электрическия схема устройства, содержащая устройство управления первым электродвигателем 11; первый электродвигатель 13; устройство управления вторым электродвигателем 12; второй электродвигатель 14; датчик положения вала первого электродвигателя 15; датчик положения вала второго электродвигателя 16. а также блок управления синхронным вращением, включающий узел гальванической развязки 1; первый одновибратор 2; второй одновибратор 3; логическую схему синхронизации 4; реверсивный счетчик 5; сумматор 6; дешифратор 7; узел индикации 8; первый цифроаналоговый преобразователь 9; второй цифроаналоговый преобразователь 10; задатчик интенсивности 17.
Задатчик интенсивности 17 формирует параллельный цифровой код, поступающий на вход первого цифроаналогового преобразователя 9 и на первый вход сумматора 6. На второй ход сумматора 6 поступает параллельный цифровой код с выхода реверсивного счетчика 5. С выхода сумматора 6 параллельный цифровой коп поступает на вход второго цпфроаналогового преобразователя 10. Выходы первого 9 и сшрого 10 цифроаналоговых преобразователей, являющиеся выходами блока упрзрлени синхронным вращением, соединень соответственно со входами первого 11 и второго 12 устройств управления первым 13 и вторым 14 электродвигателями, валы которых имеют жесткую кинематическую связь с датчиками положения вала 15, 16. Выходы датчиков положения вала первого 15 и второго 16 электродвигателей соединены соответственно с первым и вторым входами узла гальванической развязки 1, являющихся входами блока управления синхронным вращением. Выходы узг.а гальванической развязки 1 поступают на входы одновибраторов 2, 3, выходы которых Xi и Ха поступают на вход логической схемы синхронизации 4. Причем импульсы Х| характеризуют положение вала первого электродвигателя, а импульсы Х2 характеризуют положение вала второго эпектродвига- теля.
Логическая схема синхронизации 4 реализует функцию
Yi - /Xi + X2/ Xi
Y2 - /Xi + Х2/ЛХ2,
где Vt и Y2 выходы логической схемы синхронизации 4, поступающие соответственно на суммирующий и вычитающий входы
реверсивного счетчика 5. Выход реверсивного счетчика 5. Выход реверсивного счетчика 5 поступает на вход дешифратора 7, выход которого соединен с выходом узла
индикации 8.
Блок управления синхронным вращением реализует функцию автоматического поддержания синхронного вращения валов двух электродвигателей по положению од0 ного вала электродвигателя относительно другого.
Цифровой код, поступающий с зздатчи- ка интенсивности 17, при отсутствии информации на реверсивьом счетчике, поступает
5 без изменений на входы первого 9 и второго 10 цифроаналоговых преобразователей, нз выходах которых образуется аналоговое напряжение, заставляющее вращаться валы электродвигателей с определениоЛ частотой.
0 С момента начала вращения информация о положении вала каждого электродвигателя поступает через узел гальаачиче :кой развязки 1, одновибраторы 2, 3, логическую схему синхронизации 4 на суммирующий и
5 вычитающий входы реверсивного счетчи:а 5. Логическая схема синхронизации 4 обеспечивает наличие уровня сигнала на одном из входов реверсий-юго .-а при изменении уроечя сиггалг на другом
0 входе. В рез-/ль т г оОеспеш- ьа тс сохранение информзи и п,о/-. 1-11е/1 чесе° реверсивный счег- и5. Пр,)чиг. и -, - о с положении вела льрвого . 1га,еля поступает на сум; ,,ий и ;од репеисив5 ного счетчика 5, s информация о сложении вала второго электродвигателя поступает на вычитающий вход реверсивного с (етчика 5. На выходе реверсивного счетчика 5 образуется параллельный цифровой код, величина
0 и знак которого соответствует величине рассогласования синхронного вращения между первым и вторым валами электродвигателей 13, 14. Таким образом на входе второго цифроаналогового преобразователя фор5 мируется параллельный цифровой код по закону
+ Uoiu,
где 1)2 - параллельный цифровой код, формирующийся на входе второго цифроанало0 гового преобразователя 10;
Ui - параллельный цифровой код, сформированный задатчиком интенсивности 17 и поступающий ча вход первого цифроаналогового преобразователя 9;
5 Уош - параллельный цифровой код, сформированный на выходе реверсивного счетчика 5. Причем если вал первого электродвигателя вращается быстрее, то знак Уош будет положительным. В противном случае знак Uom будет отрицательным. Таким образом осуществляется автоматиче- ское поддержание синхронного вращения валов двух электродвигателей по их взаимному положению с начала синхронного вращения.
В связи с тем, что устройство управления электродвигателями 11, 12 и электродвигатели 13, 14 отличаются параметрами, блок синхронного вращения, адаптивно устанавливает параллельный цифровой код, UQUJ, при котором физическая величина рассогласования синхронного вращения валов электродвигателей равняется нулю. При этом величина Уош будет отооражена на цифровом табло узла индикации 8. Подстройкой одного из цифроаналсгсвых преобразователей возможна установка иош в ноль.
Блок синхронного вращения обладает Польшей надежностью и не требует настройки по сравнению с аналоговыми системами так как ссе его узлы состыков) ваются на цифровом уровне. Применение изобретения позволит реализовать режим синхронного вращения валов двух электродвигателей с минимальной, для параметров данной системы, величиной рассогласование, а также контро лировать ее по цифровому таило узла индикации 8.
Формул а и з о б р е т е н и я
Электропривод, содержащий два электродвигателя, каждый из которых снабжен устройством управления и датчиком положения вала электродвигателя, отличающийся тем, что, с целью повышения точности синхронного вращения валов электродвигателей, в него введен блок управления синхронным вращением, включающий в себя узел гальванической развязки, два одновибратора, реверсивный счетчик, дешифратор, узел индикации, задатчик интенсивности, сумматор, первый и второй цифрозналоговые преобразователи и логическую схему синхронизации, причем первый и второй входы узла гальванической
развязки являются первым и вторым входами блока управления синхронным вращением, а первый и второй выходы узла гальванической развязки подключены соответственно к входам первого и второго одновибраторов, вкоды логической схемы синхронизации соединены с выходами-одновибраторов, а выходы подключены соответственно к суммирующему и вычитающему входам реверсивного счетчика, выход реверсивного счетчика подключей через дешифратор к узлу индикации и к первому входу сумматора, к второму входу которого подключен выход задатчика интенсивности, вход первого цифроаналогового преобразоватетя соединен с выходом задатчика интенсивности, вход второго циф- роаналоговогс преобразователя соединен с выходом сумматора, выходы первого и второго цифроаналоговых преобразователей являются выходами блока управления синхронным вращением и подключены соответственно к устройствам упоавлония первого и второго электродвигателей, а датчики-положения первого и второго электродвигателей соединены с первым и вторым входами
блока управления синхронным вращением, логическая схема синхронизации реализ /еп функцию
YI (Xi + Х2) - Xi и Y2 (X1 + Х2)А X:,
где Хч и Х2 - сигналы соответственно на первом и втором входах логической схемы синхронизации;
YI и Ya - сигналы соответственно на первом и втором выходах логической схемы синхронизации.
ZMU
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования температуры | 1986 |
|
SU1403025A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВПРЫСКОМ ТОПЛИВА | 1992 |
|
RU2037064C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ-МАХОВИКОМ | 1980 |
|
SU1840113A1 |
| Функциональный преобразователь многих перемнных | 1981 |
|
SU1115068A1 |
| Устройство для управления многоканальным вибростендом | 1980 |
|
SU924665A1 |
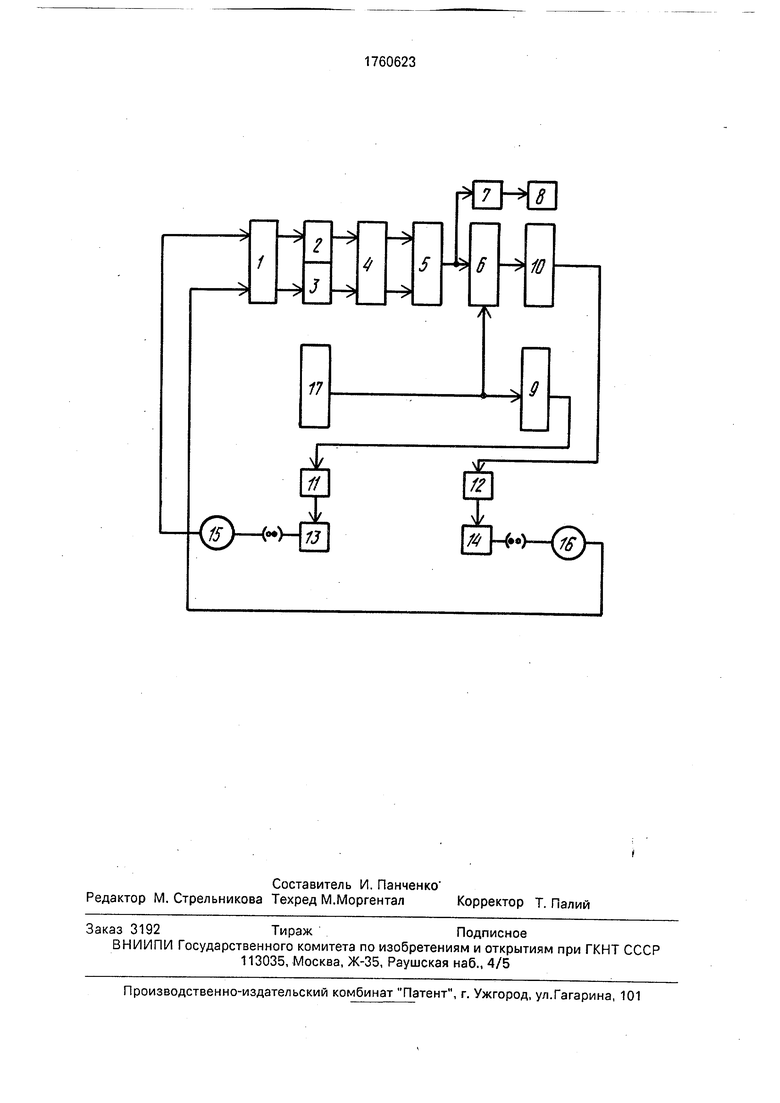
Использование: для обеспечения синхронного вращения валов двух электродвигателей, кинематически не связанных друг с другом. Сущность: первый 13 и второй 14 электродвигатели с устройствами управления 11,12 и датчиками положения вала элек- тродвигателей 15, 16 снабжены блоком управления синхронным вращением, что позволяет повысить точность синхронного вращения валов двух электродвигателей. 1 ил.
-
J
-
±
11
Т
13
| Авторское свидетельство СССР №819921, Н 02 Р 5/46, 1981 | |||
| Многодвигательный электропривод | 1986 |
|
SU1372584A1 |
