(21)4829088/29 (22)28.05.90 (46)23.09.92. Бюл. Ns 35
(71)Львовский политехнический институт им.Ленинского комсомола
(72)Б.И.Киндрацкий и Р.С.Курендаш (56) Авторское свидетельство СССР № 1508015, кл. F 15 В 11/12, 1988.
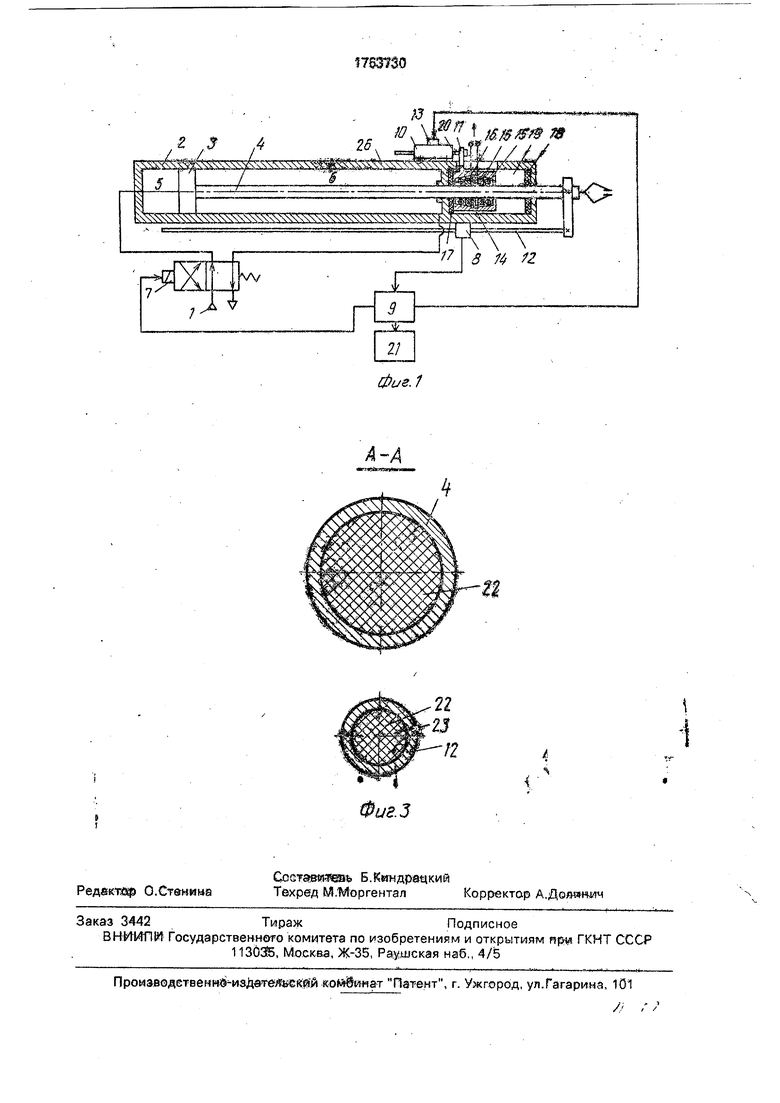
(54) ПОЗИЦИОННЫЙ ПНЕВМОПРИВОД (57) Изобретение м.б, использовано в роботах и манипуляторах. Цель изобретения - повышение быстродействия пневмопривода. Выполнение демпфирующего устройства в виде предварительно напряженных стержней 22, 23 из полимерного материала, установленных внутри штока 4 и штанги 12 позволяет уменьшить продолжительность колебаний рабочего органа е точке позиционирования. 3 ил.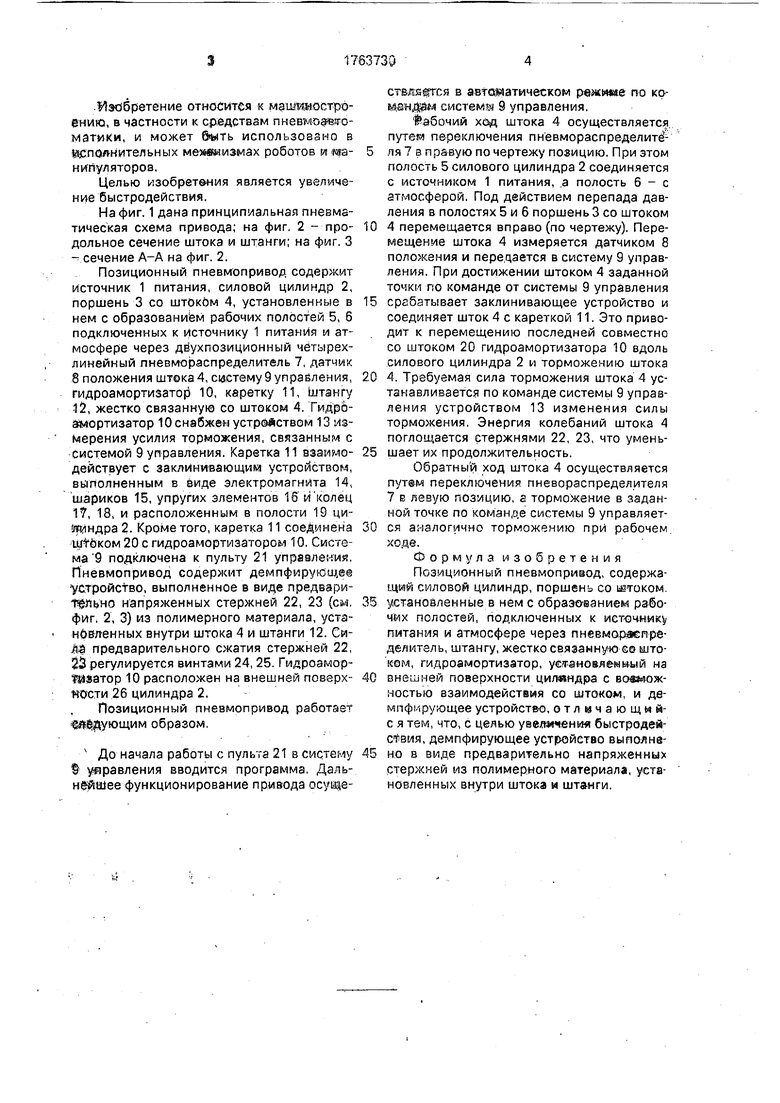
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный пневмопривод | 1991 |
|
SU1827450A1 |
| Пневмопривод | 1984 |
|
SU1267069A1 |
| Позиционный пневмопривод | 1982 |
|
SU1078147A1 |
| Привод исполнительного органа робота | 1982 |
|
SU1122501A1 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
| Пневмопривод промышленного робота | 1986 |
|
SU1364781A1 |
| Пневмопривод | 1984 |
|
SU1278494A1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС С УНИВЕРСАЛЬНЫМ СИЛОВЫМ УСТРОЙСТВОМ | 2012 |
|
RU2497714C2 |
| ПНЕВМОЦИЛИНДР | 1991 |
|
RU2006684C1 |
| Позиционный пневмопривод | 1982 |
|
SU1090936A1 |
Я
Qs СО
СО
Изобретение относится к машиностроению, в частности к средствам пневмоавтоматики, и может &мть использовано в дополнительных меявыизмах роботов и «а- нипуляторов.
Целью изобретения является увеличение быстродействия.
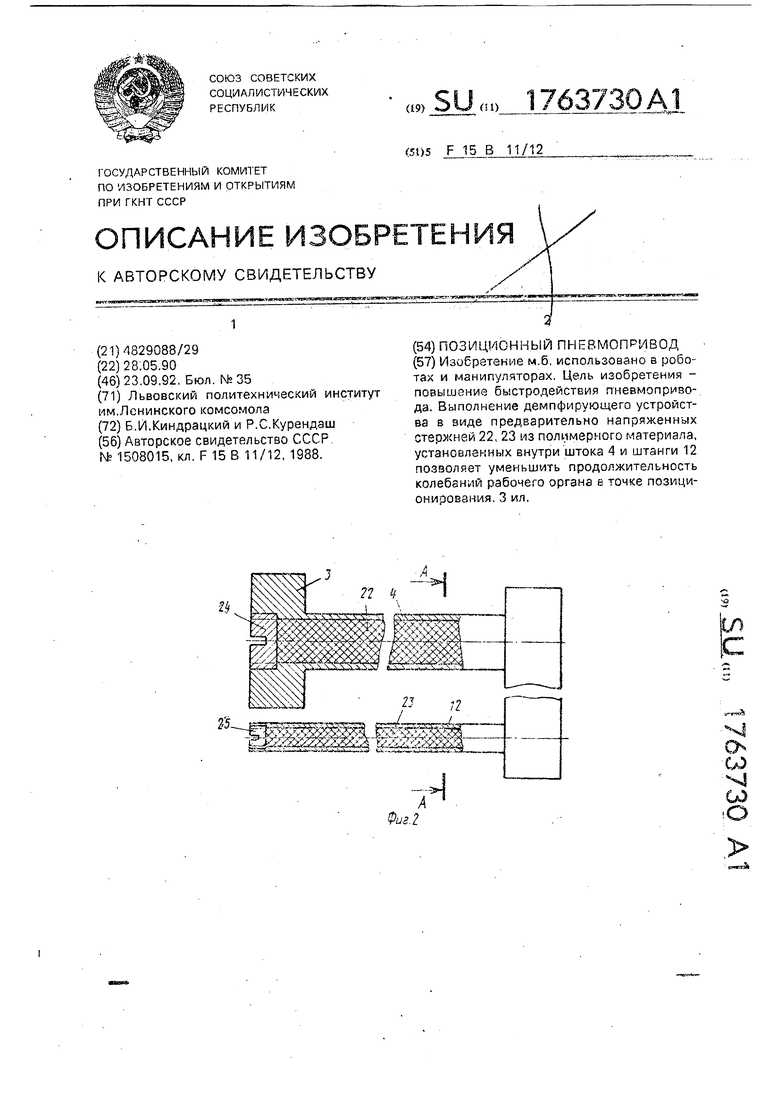
На фиг. 1 дана принципиальная пневматическая схема привода; на фиг 2 - про- дольное сечение штока и штанги; на фиг 3 - сечение А-А на фиг. 2.
Позиционный пневмопривод содержит источник 1 питания, силовой цилиндр 2, поршень 3 со штоком 4, установленные в нем с образованием рабочих полостей 5, 6 подключенных к источнику 1 питания и атмосфере через двухпозиционный четырехлинейный лневмораспределитель 7, датчик 8 положения штока 4, систему 9 управления, гидроамортизатор 10, каретку 11, штангу 12, жестко связанную со штоком 4. Гидро- змортизатор 10 снабжен устройством 13 измерения усилия торможения, связанным с системой 9 управления. Каретка 11 взаимо- действует с заклинивающим устройством, выполненным в виде электромагнита 14, шариков 15, упругих элементов 16 и колец 17, 18, и расположенным в полости 19 ци юмндра 2. Кроме того, каретка 11 соединена иггЬком 20 с гидроамортизатором 10. Система 9 подключена к пульту 21 управлений. Пневмопривод содержит демпфирующее устройство, выполненное в виде предвари- напряженных стержней 22, 23 (см фиг. 2, 3) из полимерного материала, установленных внутри штока 4 и штанги 12. Сиди предварительного сжатия стержней 22, 23 регулируется винтами 24, 25 Гидроамор- Тйзатор Ю расположен на внешней поверх- кости 26 цилиндра 2.
Позиционный пневмопривод работает &й0Цующим образом
4 До начала работы с пульта 21 в систему © управления вводится программа Дапь- нейшее функционирование привода осуществляется в автоматическом режиме по ко- систему 9 управления.
Рабочий ход штока 4 осуществляется путем переключения пневмораспределите - пя 7 в правую по чертежу позицию. При этом полость 5 силового цилиндра 2 соединяется с источником 1 питания, а полость 6 - с атмосферой. Под действием перепада давления в полостях 5 и 6 поршень 3 со штоком 4 перемещается вправо (по чертежу). Перемещение штока 4 измеряется датчиком 8 положения и передается в систему 9 управления. При достижении штоком 4 заданной точки по команде от системы 9 управления срабатывает заклинивающее устройство и соединяет шток 4 с кареткой 11. Это приводит к перемещению последней совместно со штоком 20 гидроамортизатора 10 вдоль силового цилиндра 2 и торможению штока 4 Требуемая сила торможения штока 4 устанавливается по команде системы 9 управления устройством 13 изменения силы торможения. Энергия колебаний штока 4 поглощается стержнями 22, 23, что уменьшает их продолжительность.
Обратный ход штока 4 осуществляется пут©м переключения пневораспределителя 7 в левую позицию, а торможение в заданной точке по команде системы 9 управляется аналогично торможению при рабочем ходе.
Формула изобретения
Позиционный пневмопривод, содержащие силовой цилиндр, поршень со штоком установленные в нем с образованием рабочих полостей, подключенных к источнику питания и атмосфере через пневмораепре- делитель, штангу, жестко связанную G© штоком, гадроамортизатор, установле-итый на внешней поверхности цил«ндра с возможностью взаимодействия со штоком, и демпфирующее устройст&о, отлвчающий- с я тем, что, с целью увеятенм быстродействия, демпфирующее устройство выполнено в виде предварительно напряженных стержней из полимерного материала, установленных внутри штока и шта-нги.
/ /1.......... /..
ISSSSS feSSiS S
JА ГГ
# ч tff
Фие.1
/
