1
Изобретение относится к машиностроению, в частности к пневмодвига- телям поступательного перемещения, и может быть использовано в приводах исполнительных механизмов промьшлен- ных роботов,.
Целью изобретения является повышение быстродействия пневмопривода.
13647812
После того как наклонная поверхность 22 одного из кулачков 21 коснется якоря 24 электромагнита 14 оба кулачка 21 вместе с шестернями 17 поворачиваются вокруг оси 18, растягивая пружины 19. Находящиеся в зацеплении с шестернями 17 шестерни 16, при этом поворачивают связанные
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Самоустанавливающаяся головка робота | 1983 |
|
SU1103980A1 |
| Промышленный робот | 1987 |
|
SU1437216A1 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Самоустанавливающаяся головка робота | 1984 |
|
SU1274902A1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
Изобретение м.б. использовано в приводах исполнительных механизмов промьшшенных роботог. Цель изобретения - повьшение быстродействия пневмопривода. Направляющая штанга 5 связана траверсами (Т) 6 со схватом 8 рабочего органа, при этом шток (Ш) 3 соединен со схватом В шарнирно. Каждая Т 6 снабжена механизмом поворота Ш 3 в крайних положениях поршня. ге J7 21 4 J6 IS S /« Механизм выполнен в виде электромагнита 14, установленного на корпусе, и конической шестеренной передачи, шестерня 16 которой жестко закреплена на Ш 3, а шестерня 17 шарнирно установлена на Т 6. Шестерня 17 снабжена возвратной пружиной 19, ограничителем поворота 20 и кулачками 21 с наклонными поверхностями 22 и 23, взаимодействующими с якорями 24 электромагнитов 14. Вращательное движение Ш 3 с поршнем перед началом поступательного перемещения позволяет сменить статическое трение в уплотнениях на трение движения. Сопротивление поступательному движению при этом оказывает осевая составляющая сил трения, что снижает силу сопротивления. За счет этого резко снижается время наполнения рабочей полости цилиндра и пневмомагистрали. Снижается и время перемещения на участке хода Ш 3 во время его поворота. 3 ил. с (О ЗидА Ъ 22 Г8 25 ее 5 00 / ./ iff и г. Z /J 70
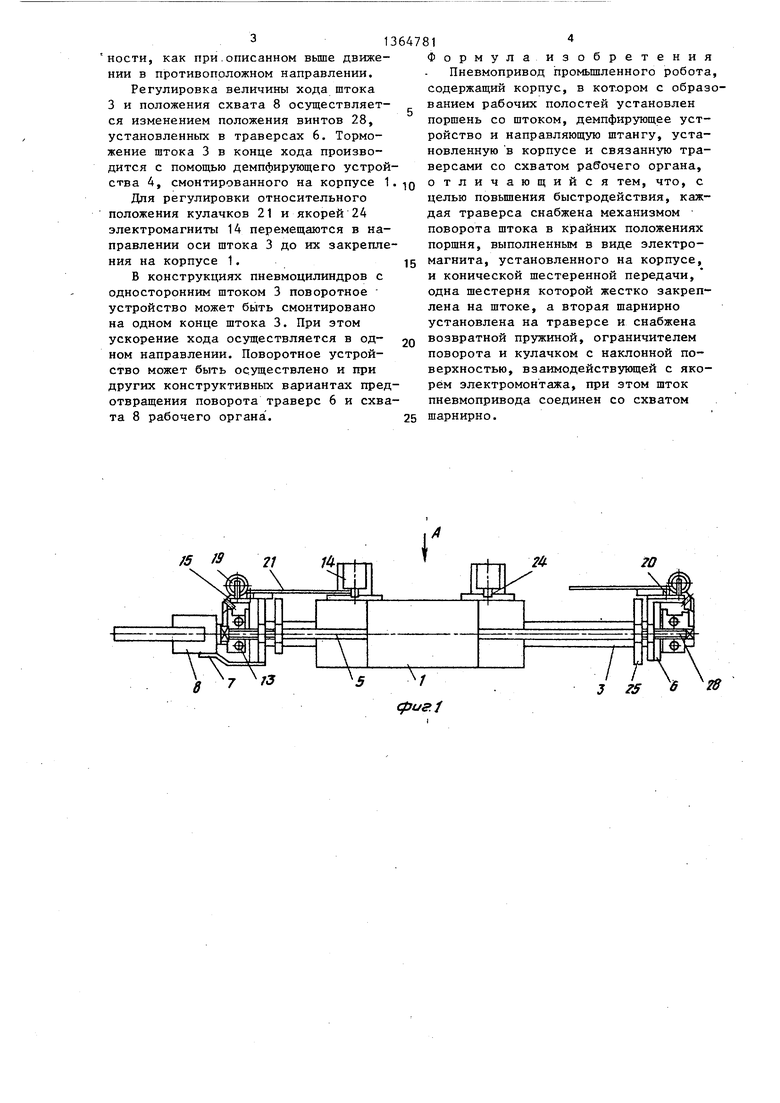
На фиг. 1 представлен пневмопривод д с ними через ступицы 12, втулки 11
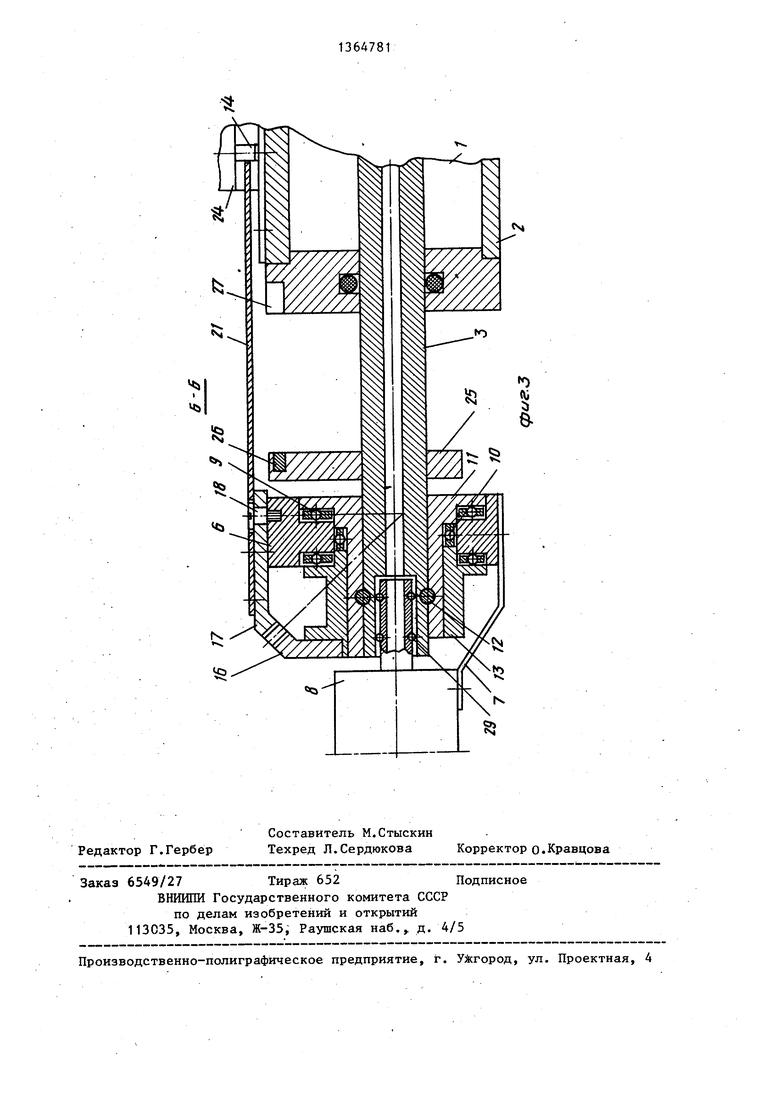
промышленного робота, общий вид на фиг. 2 -/вид А на фиг. 1; на фиг. 3- разрез В-Б на фиг. 2.
Пневмопривод промьшгленного робота содержит корпус 1, в котором с образованием рабочих полостей 2 установлен поршень (не показан) со штоком 3 i демпфирующее устройство 4 и направляющую штангу 5, установленную в кор- пусе 1 и связанную траверсами 6 и кронштейнами 7 со схватами 8 рабочего органа. Траверсы 6 установленные на штоке 3 с помощью упорных подшип- НИКОВ 9 и радиальных подшипников 10, шарнирно связанными со втулками 11 и ступицами 12, жестко соединенными со штоком 3 штифтами 13.
Каждая траверса 6 снабжена механизмом поворота штока 3 в крайних положениях поршня, выполненным в виде электромагнита 14, установденного на корпусе 1 и конической шестеренной передачи 15, шестерня 16 которая жестко закреплена на штоке 3, а шестерня 17 на оси 13 шарнирно установлена на траверсе 6. Шестерни 17, кроме того, пружинами 19 растяжения поджаты к ограничителям поворота 20, жестко закрепленньм на траверсах 6, а также имеют кулачки 21 с наклонными поверхностями 22 и 23, для взаимодействия с якорями 24 электромагнитов 14.
Между траверсами 6 и корпусом 1 установлены с возможностью поступательного перемещения упоры 25 с вмонтированными в них магнитами 26, взаимодействующими с установленными в корпусе 1 гирконами 27 системы управления (не показаны). Упоры 25 посредством регулировочных винтов 28 связаны с траверсами 6. Схват 8 установлен на штоке 3 с помощью подшипника 29.
Пневмопривод промьш1ленного робота работает следующим образом.
При перемещении штока 3 из одного крайнего положения в другое, например слева направо, все связанные с ним элементы движутся поступательно.
30
и шток 3. В заключительный период хода штока 3 якорь 24 левого электр магнита 14 взаимодействует с наклон ной поверхностью 23 кулачка 21. Схв
15 8, шарнирно связанный со штоком 3 и жестко через кронштейн 7 с травер сой 6, при этом перемещается только поступательно. При подходе магнита 26 к гиркону 27 дается сигнал в
20 цепь управления на отключение воздуха.
Наклонные поверхности 23 кулачк 21, упирающиеся в якоря 24 электро магнитов 14, препятствуют повороту
25 кулачков 21 и штока 3.
При обратном ходе одновременно дается сигнал на включение воздуха в другую полость 2 пневмопривода и электромагнитов 14. При этом якоря 24 электромагнитов 14 выходят из к такта с наклонными поверхностями 2 кулачков 14, которые под действием пружин 19 растяжения, поворачивают при этом вместе с шестернями 16 и
ступицами 12, втулками 11 и штоком I
При вращательном движении штока
3 с поршнем перед началом поступательного перемещения статическое т ние в уплотнениях сменяется меньши по величине трением движения. Кром того, сопротивление поступательном движению при этом оказывает осевая составляющая сил трения при их разл жении на направление поступательно
45 перемещения и перпендикулярное ему тангенциальное. Время наполнения р бочей полости цилиндра и пневмома- гистрали, зависящее от сил сопротив ления поступательному перемещению,
50 при этом резко снижается. Снижается и время перемещения на участке хода штока 3 во время его поворота.
В конце хода штока 3 влево процесс поворота штока 3 осуществляетс
55 взаимодействием наклонных поверхнос тей 22 и 23 кулачка 21, установленного с правой стороны штока 3 и последовательность работы устройства повторяется в той же последователь35
40
с ними через ступицы 12, втулки 11
и шток 3. В заключительный период хода штока 3 якорь 24 левого электромагнита 14 взаимодействует с наклонной поверхностью 23 кулачка 21. Схват
8, шарнирно связанный со штоком 3 и жестко через кронштейн 7 с траверсой 6, при этом перемещается только поступательно. При подходе магнита 26 к гиркону 27 дается сигнал в
цепь управления на отключение воздуха.
Наклонные поверхности 23 кулачков 21, упирающиеся в якоря 24 электромагнитов 14, препятствуют повороту
кулачков 21 и штока 3.
При обратном ходе одновременно дается сигнал на включение воздуха в другую полость 2 пневмопривода и электромагнитов 14. При этом якоря 24 электромагнитов 14 выходят из контакта с наклонными поверхностями 23 кулачков 14, которые под действием пружин 19 растяжения, поворачиваются при этом вместе с шестернями 16 и 17
ступицами 12, втулками 11 и штоком 3. I
При вращательном движении штока
3 с поршнем перед началом поступательного перемещения статическое трение в уплотнениях сменяется меньшим по величине трением движения. Кроме того, сопротивление поступательному движению при этом оказывает осевая составляющая сил трения при их разложении на направление поступательного
перемещения и перпендикулярное ему тангенциальное. Время наполнения рабочей полости цилиндра и пневмома- гистрали, зависящее от сил сопротивления поступательному перемещению,
при этом резко снижается. Снижается и время перемещения на участке хода штока 3 во время его поворота.
В конце хода штока 3 влево процесс поворота штока 3 осуществляется
взаимодействием наклонных поверхностей 22 и 23 кулачка 21, установленного с правой стороны штока 3 и последовательность работы устройства повторяется в той же последователь
ности, как при.описанном вьше движении в противоположном направлении.
Регулировка величины хода штока 3 и положения охвата 8 осуществляется изменением положения винтов 28, установленных в траверсах 6. Торможение штока 3 в конце хода производится с помощью демпфирующего устройства 4, смонтированного на корпусе 1.
Для регулировки относительного положения кулачков 21 и якорей 24 электромагниты 14 перемещаются в направлении оси штока 3 до их закрепления на корпусе 1.
В конструкциях пневмоцилиндров с односторонним штоком 3 поворотное устройство может быть смонтировано на одном конце щтока 3. При этом ускорение хода осуществляется в од- ном направлении. Поворотное устройство может быть осуществлено и при других конструктивных вариантах предотвращения поворота траверс 6 и схва- та 8 рабочего органа.
15 19
73
Формулаизобретения Пневмопривод промьшгленного робота содержащий корпус, в кот-ором с образванием рабочих полостей установлен поршень со штоком, демпфирующее устройство и направляющую штангу, установленную в корпусе и связанную траверсами со схватом рабочего органа, отличающийся тем, что, с целью повьш1ения быстродействия, каждая траверса снабжена механизмом поворота штока в крайних положениях порщня, выполненным в виде электромагнита, установленного на корпусе, и конической шестеренной передачи, одна шестерня которой жестко закреплена на штоке, а вторая шарнирно установлена на траверсе и снабжена возвратной пружиной, ограничителем поворота и кулачком с наклонной поверхностью, взаимодействующей с якорем электромонтажа, при этом шток пневмопривода соединен со схватом шарнирно.
3 гу
28
дзиг.1
| Белянин П.Н | |||
| Промышленные роботы Японии | |||
| - НИАБ, 1977, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
