Изобретение относится к машиностроению, в частности к силовым исполнительным механизмам промышленных роботов и манипуляторов. Целью изобретения является повышение надежности и эффективности торможения пневмопривода. На чертеже представлена принципиальная схема пневмопривода. Пневмопривод содержит цилиндр 1, поршень 2 со штоком 3, установленные в нем с образованием рабочих полостей 4 и 5, демпфирующее устройство, выполненное в виде двух плунжеров 6, 7 и двух цилиндров 8 и 9, образующих между собой пары, расположенные по обеим сторонам порщня 2 с возможностью образования в конце хода поршня тормозных камер 10 и 11 (последняя образуется при перемещении порщня 2 в крайнее левое по чертежу положение), два пневмораспределителя 12 и 13 подключены к одной из рабочих полостей 4 и 5, источнику 14 питания и атмосфере через дроссели 15 и 16. Устройство управления пневмораспределителем 12 выполнено в виде установленного в корпусе 17 плунжера 18 с мембраной 19 с образованием торцовой управляющей полости 20, пружин 21 и 22 электромагнита 23, а устройство управления пневмораспределителя 13 - в виде установленного в корпусе 17 плунжера 24 с мембраной 25 с образованием торцовой управляющей полости 26, пружин 27, 28 и электромагнита 29. Торцовые управляющие полости 20 и 26 сообщены линиями 30 и 31 с соответствующими тормозными камерами 10, 11 и атмосферой через дроссели 3.2 и 33. Кроме того, плунжеры 6, 7 и цилиндры 8 и 9 расположены вне рабочих полостей 4 и 5, а цилиндры 8 и 9 установлены с возможностью перемещения и фиксации их посредстом винтов 34 в требуемом положении относительно щтока 3. Пневмопривод работает следующим образом. При поступлении сигнала управления на электромагнит 29 пневмораспределитель 13 переключается, сообщая рабочую полость 5 с источником 14 питания. При этом пневмораспределитель 12 удерживается пружиной 22 в позиции, при которой рабочая полость 4 сообщена через дроссель 15 с атмосферой. Под действием перепада давлений в рабочих полостях 4 и 5 порщень 2 со штоком 3 перемещается вправо по чертежу. Необходимая скорость перемещения щтока 3 устанавливается дросселем 15. На определенном участке перемещения щтока 3 плунжер 6 входит в цилиндр 8, образуя тормозную камеру 10, объем которой уменьщается при движении штока 3. Давление воздуха в тормозной камере 10 возрастает, что препятствует перемещению штока 3. Одновременно по линии 30 воздух поступает в управляющую полость 20, а затем стравливается в атмосферу через дроссель 32. По достижении давления в полости 20, определяемого настройкой пружин 21 и 22, плунжер 18 перемещается относительно корпуса 17, устанавливая пневмораспределитель 12 в позицию, при которой рабочая полость 4 сообщается с источником 14 питания. При этом скорость перемещения щтока 3 резко снижается до минимального значения. Время, в течение которого рабочая полость 4 связана с источником 14 питания, создавая противодавление, устанавливается дросселем 32. Так как при понижении скорости перемещения штока 3 давление в тормозной камере 10 и управляющей полости 20 падает за счет стравливания воздуха через дроссель 32 в атмосферу, то под действием пружин 21 и 22 пневмораспределитель 12 устанавливается в исходную позицию. В дальнейщем скорость перемещения щтока 3 зависит от пропускной способности дросселя 32, который настраивается таким образом, чтобы происходила безударная остановка щтока 3. Изменяя усилие пружины 21, настраивается величина давления воздуха в полости 20, при котором происходит переключение пневмораспределителя 12. Перемещение штока 3 в противоположную сторону достигается подачей сигнала на электромагнит 23 пневмораспределителя 12 и снятием сигнала с электромагнита 29 пневмораспределителя 13. Процесс торможения штока 3 при перемещении его влево по чертежу осуществляется аналогично. Величина хода щтока 3 в ту или другую стороны может регулироваться путем перемещения цилиндров 8 и 9 относительно щтока 3 без разборки цилиндра 1. Таким образом, конструкция привода позволяет в значительной степени улучшить динамические характеристики и повысить надежность его работы. Формула изобретения Пневмопривод, содержащий цилиндр, поршень со штоком, установленный в нем с образованием рабочих полостей, демпфирующее устройство, выполненное в виде двух пар плунжер-цилиндр, расположенных по обеим сторонам порщня с возможностью образования в конце хода поршня тормозных камер, два управляемых пневмораспределителя, каждый из которых подключен к одной из рабочих полостей, а устройство его управления выполнено в виде плунжера, размещенного в корпусе, отличающийся тем, что, с целью повыщения надежности и эффективности торможения, плунжер устройства управления каждого пневмораспределителя размещен в корпусе с образовани34
ем торцовой управляющей полости, сооб-тановленн 1Й дроссель, причем каждая иащенной с соответствующей тормозной каме-ра плунжер-цилиндр демпфирующего устрой и атмосферой через дополнительно ус-ройства расположена вне рабочих полостей.
1267069 
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| Пневмопривод | 1984 |
|
SU1278494A1 |
| Пневмопривод | 1988 |
|
SU1583670A1 |
| Цифровой пневмогидравлический привод | 1980 |
|
SU1019118A1 |
| Комбинированный тормозной пневмопривод тягача | 1985 |
|
SU1281460A1 |
| Устройство для управления механизмом подачи изделий в зону обработки | 1987 |
|
SU1454768A1 |
| Регулятор давления в пневматическом тормозном приводе транспортного средства | 1983 |
|
SU1122530A1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Гидравлический демпфер | 1978 |
|
SU739279A1 |
Изобретение относится к области пневмопривода и может быть использовано в силовых исполнительных механизмах промышленных роботов и манипуляторов. Изобретение позволяет повысить надежность и эффективность торможения пневмопривода. Демпфирующее устройство выполнено в J. /ff 2f 23 1 виде двух пар плунжер-цилиндр, расположенных по обеим сторонам поршня 2 вне рабочих полостей 4, 5. Устройство управления пневмораспределителем 12 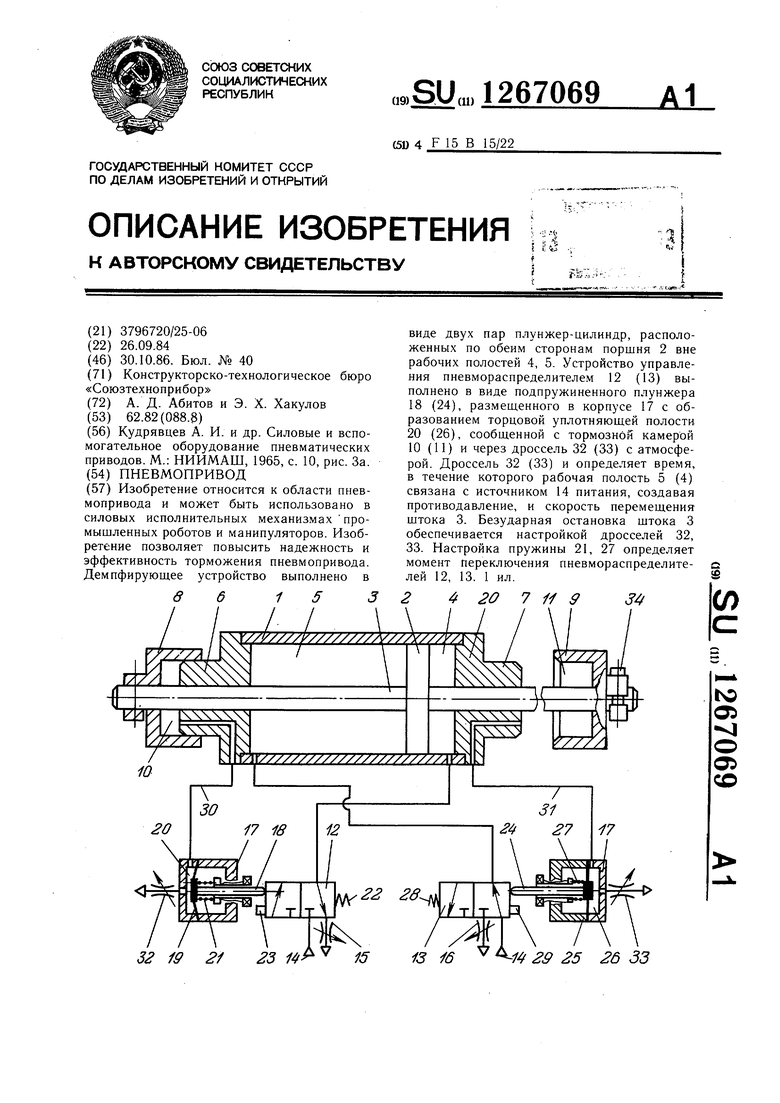
| Кудрявцев А | |||
| И | |||
| и др | |||
| Силовые и вспомогательное оборудование пневматических приводов | |||
| М.: НИИМАШ, 1965, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| За. | |||
