(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ УХОДОВ НАВИГАЦИОННЫХ СИСТЕМ ПОДВИЖНЫХ НОСИТЕЛЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2504733C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2017 |
|
RU2660383C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2013 |
|
RU2545490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Комплекс бортового оборудования вертолета | 2016 |
|
RU2652344C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
Изобретение относится к автоматизации эксплуатации авиационной техники и позволяет квалифицировать состояние навигационного оборудования в полете. Находят расстояние между коррекциями на воздушной трассе, при которых возможно определить соответствие погрешностей счисления пути навигационным оборудованием их нормативным значениям. В полете проводят коррекцию счисленных координат через указанные интервалы и регистрируют разности между счисленными и определенными средствами позиционной коррекции координатами. По полученным результатам за весь полет оценивают состояние нацига- ционного оборудования, его соответствие нормам технических параметров по точности и возможность его дальнейшей эксплуатации без технического обслуживания.
Изобретение относится к эксплуатации авиационной техники, а именно к способам определения состояния навигационного оборудования воздушного судна (ВС), включающего в себя измерители путевого угла (курса и угла сноса), путевой скорости или ее составляющих, навигационного вычислителя,
Известны способы определения работоспособного состояния навигационного оборудования, при которых значения его погрешностей, характеризующих способность осуществлять счисление пути с заданной точностью, оцениваются с помощью контрольно-проверочной аппаратуры при простоях ВС на техническом обслуживании.
Известны также операции по определению отклонения ВС от оси маршрута в полете для последующей коррекции
навигационного оборудования с целью удержания ВС в пределах трассы заданной ширины.
Недостатком известного способа является то, что с его помощью невозможно определить состояние нацигационного оборудования по точности счисления пути в полетах.
Цель изобретения-определениеточности нацигационного оборудования в полете для сравнения с действующими нормами точности счисления пути как основной характеристики его состояния.
По известным нормативным точностным характеристикам навигационного оборудования счисления пути, известным характеристикам воздушных трасс с учетом расположения средств позиционной коррекции определяют расстояние между кор2
Јь
О CJ 00
рекциями счисленных координат, при которых возможна нормативная оценка точности; по измеренным в полете значениям боковой и продольной абсолютных погрешностей счисления координат по всему мар- шруту находят среднеквадратические значения боковой и продольной погрешностей, характеризующих текучщую точность навигационного оборудования, и квалифицируют работоспособное состояние навигационного оборудования, если указанные среднеквадратические значения погрешностей не превышают нормативных значений. Расстояние по прямой между коррекциями счисленных координат, пролетаемое воздушным судном в пределах допустимых уклонений, через которое определяются погрешности счисления координат, характеризующие состояние навигационного оборудования, находят по формуле
Зкп -
oid
5k
Окн + ffO) t/2 )2 + Oyc + oinv
где Okd - допустимая среднеквадратиче- ская погрешность (СКП) счисления боковой координаты;
Oik - СКП измерения боковой координаты позиционным корректором;
- СКП начальной выставки курса;
Oar СКП азимутального ухода курсового гироскопа за 1 ч полета;
t - время полета между коррекциями;
Оус - СКП измерения угла сноса;
Озпу - СКП задания путевого угла,
Если найдено по формуле (1) расстояние больше длины участка маршрута, то определяют боковую Ozn И ПРОДОЛЬНУЮ Osn
СКП счисления координат на всем участке маршрута по формулам.
Ofn Of пм + ( W t )2 ( (4 +
+ ( a a) t/2 )2 + Oyc + ofny )
Osn О|пм + ( Ow t )2
(2)
где ok™ . , - СКП задания навигационной программой боковой и продольной координат пункта маршрута;
W, CW - путевая скорость полета и СКП ее измерения.
Далее находят СКП счисления боковой и продольной координат воздушного судна в начале следующего i-ro участка маршрута из уравнений
oim ( Oz i - 1 COSYPi )2 +
+ (as i - 1 sin УР, )2 + oinp + oiKp ,
OJHI (0-51-1 cosYPi )2 + + (ffzi-i sinYP)2 + OJKp, (3) где Orz i - 1 , 7S i - 1 - СКП счисления коор- динат на предыдущем участке маршрута;
YPi - угол разворота с предыдущего на данный участок маршрута;
Oznp , Osnp СКП преобразования счисленных координат с предыдущего уча- стка в координаты данного участка маршрута;
OZKP , Озкр - СКП счисления координат в процессе движения воздушного судна по криволинейной траектории на разворо- те.
Расстояние до точки коррекции на данном 1-м участке после разворота воздушного судна определяют по формуле (1) с учетом того, что в нее подставляют вместо рас- считанное по формуле (3) значение оы .
В полете через указанные интервалы осуществляют коррекцию счисленных координат с помощью средства позиционной коррекции, например угломерно-дально- мерной системы, и регистрируют абсолютные боковую и продольные погрешности счисления координат Дг| , && . По их значениям находят средние и СКП счисления координат по формулам п
Дг 2 Azi/n ,
As Ј Asi/n
i 1
% (Azi -Аг)/(п-1) ; i 1
W 2 (As, - As )/( n -- 1 ) ; Y i 1
где ,2n - количество коррекции счисленных координат в данном полете.
Если определенные указанными приемами СКП счисления координат не превышаютустановленныхи
регламентированных нормами технических параметров значений, то считают, что состояние навигационного оборудования работоспособно, удовлетворяет нормам точности,
и возможна его дальнейшая эксплуатация без технического обслуживания.
Устройство для осуществления способа состоит из цепи с пятью последовательно соединенными звеньями. Первое звено представляет собой вычислительное устройство для определения расстояний между коррекциями. Второе звено отражает операцию коррекции счисленных навигационным оборудованием координат воздушного судна и определение абсолютных погрешностей
между счисленными и измеренными средствами позиционной коррекции координатами. В третьем звене осуществляется регистрация и накопление указанных абсолютных погрешностей, которые подаются в четвертое звено для определения средних и среднеквадратических значений боковой и продольной погрешностей счисления координат. Пятое звено оценивает состояние на- вигационного оборудования путем сравнения погрешностей из четвертого звена с нормативными значениями.
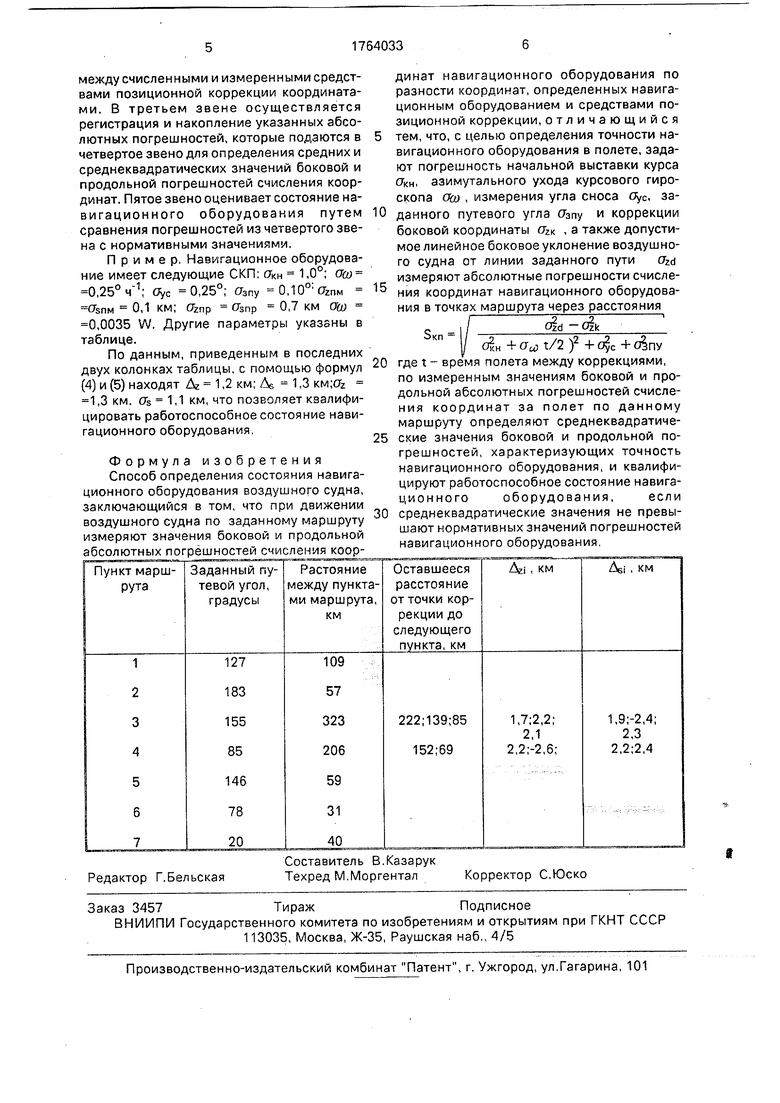
Пример, Навигационное оборудование имеет следующие СКП: (7Кн 1,0°: Oto 0,25° Оус 0,25°; Стзпу 0,10°:OknM 0,1 км; 7znp Osnp 0,7 км аш 0,0035 W. Другие параметры указаны в таблице.
По данным, приведенным в последних двух колонках таблицы, с помощью формул (4) и (5) находят Az 1,2 км; As 1,3 KM;OZ 1,3 км. as 1,1 км, что позволяет квалифицировать работоспособное состояние навигационного оборудования.
Формула изобретения Способ определения состояния навигационного оборудования воздушного судна, заключающийся в том, что при движении воздушного судна по заданному маршруту измеряют значения боковой и продольной абсолютных погрешностей счисления коор0
5
0
5
0
динат навигационного оборудования по разности координат, определенных навигационным оборудованием и средствами позиционной коррекции, отличающийся тем, что, с целью определения точности навигационного оборудования в полете, задают погрешность начальной выставки курса а™, азимутального ухода курсового гироскопа аса , измерения угла сноса ОуС, заданного путевого угла азпу и коррекции боковой координаты crZK , а также допустимое линейное боковое уклонение воздушного судна от линии заданного пути aza измеряют абсолютные погрешности счисления координат навигационного оборудования в точках маршрута через расстояния
s -oik
I/ oiH + GUI t/2 )2 + oyc + oiny где t- время полета между коррекциями, по измеренным значениям боковой и продольной абсолютных погрешностей счисления координат за полет по данному маршруту определяют среднеквадратиче- ские значения боковой и продольной погрешностей, характеризующих точность навигационного оборудования, и квалифицируют работоспособное состояние навигационного оборудования, если среднеквадратические значения не превышают нормативных значений погрешностей навигационного оборудования.
| Смирнов Н.Н | |||
| Обслуживание и ремонт авиационной техники по состоянию | |||
| М,: Транспорт, 1987, с.272 | |||
| Козарук В.В | |||
| Способ приготовления кирпичей для футеровки печей, служащих для получения сернистого натрия из серно-натриевой соли | 1921 |
|
SU154A1 |
| М.: Машиностроение, 1975, с,65-84 | |||
