

| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1984 |
|
SU1283077A1 |
| Рука манипулятора | 1985 |
|
SU1306705A1 |
| Манипулятор | 1986 |
|
SU1404324A1 |
| Рука манипулятора | 1984 |
|
SU1225778A1 |
| Манипулятор | 1985 |
|
SU1283085A1 |
| Захватное устройство для деталей | 1980 |
|
SU956271A1 |
| Выездная площадка театральных сцен | 1980 |
|
SU894159A1 |
| Устройство для торцевания пакета бревен | 1985 |
|
SU1342843A1 |
| Устройство для определения физико-механических характеристик грунта | 1989 |
|
SU1675486A1 |
| Прибор для построения кривых | 1985 |
|
SU1260259A1 |
Использование: область робототехники. Цель изобретения - расширение технологических возможностей и упрощение конструкции, Рука выполнена в виде звеньев 2-5, соединенных шарнирно и связанных тро- соблочными передачами. В последних имеются промежуточные блоки 17, 18, связанные с приводом и установленные попарно на скользящей каретке 19. При необходимости повернуть звено 4 против часовой стрелки при неизменном относительном положении звеньев 2, 3 и 5 включают индивидуальный привод звена 4. Приводы звеньев 2, 3 и 5 заторможены. Длина первого троса 10 трособлочной передачи 9 уменьшается. Под действием движущегося конца троса 10 основной блок 12 также вращается против часовой стрелки, Первый промежуточный блок 17 при этом вращается против часовой стрелки, а его ось перемещается вдоль звена 2 в направлении первого звена, в связи с тем, что второй конец троса 10 закреплен неподвижно. При необходимости повернуть звено 4 в обратном направлении (по часовой стрелке) выходной элемент привода вращается также по часовой стрелке. Трособлочная передача 26 становится передачей прямого движения, а трособлочная передача 9 - обратного движения, и работа их аналогична вышеописанной. Вращение звеньев 3 и 5 производится аналогично описанной. 1 ил. Ј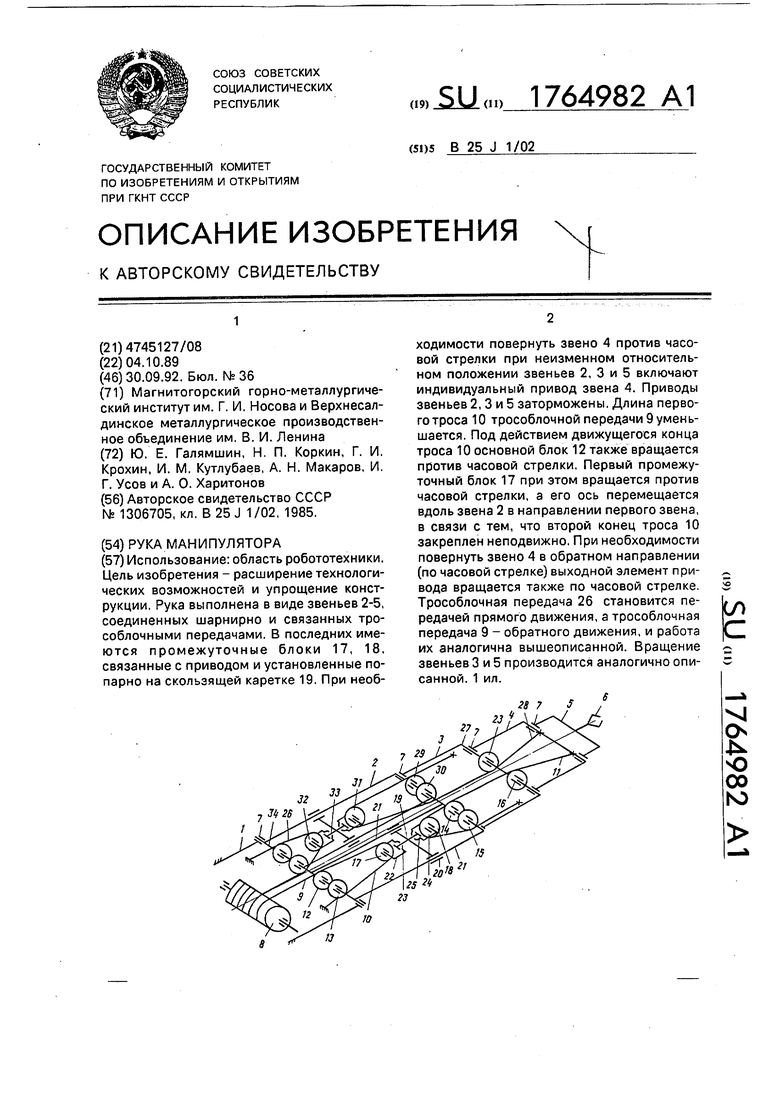
| Рука манипулятора | 1985 |
|
SU1306705A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
