1
Изобретение относится к робототехнике и предназначено для иснользования в ма- нннуляторах с бодьнюй степенью нодвижHOCTIi.
Цель изобретения - раснжрение технологических возможностей за счет повышения точности позиционирования.
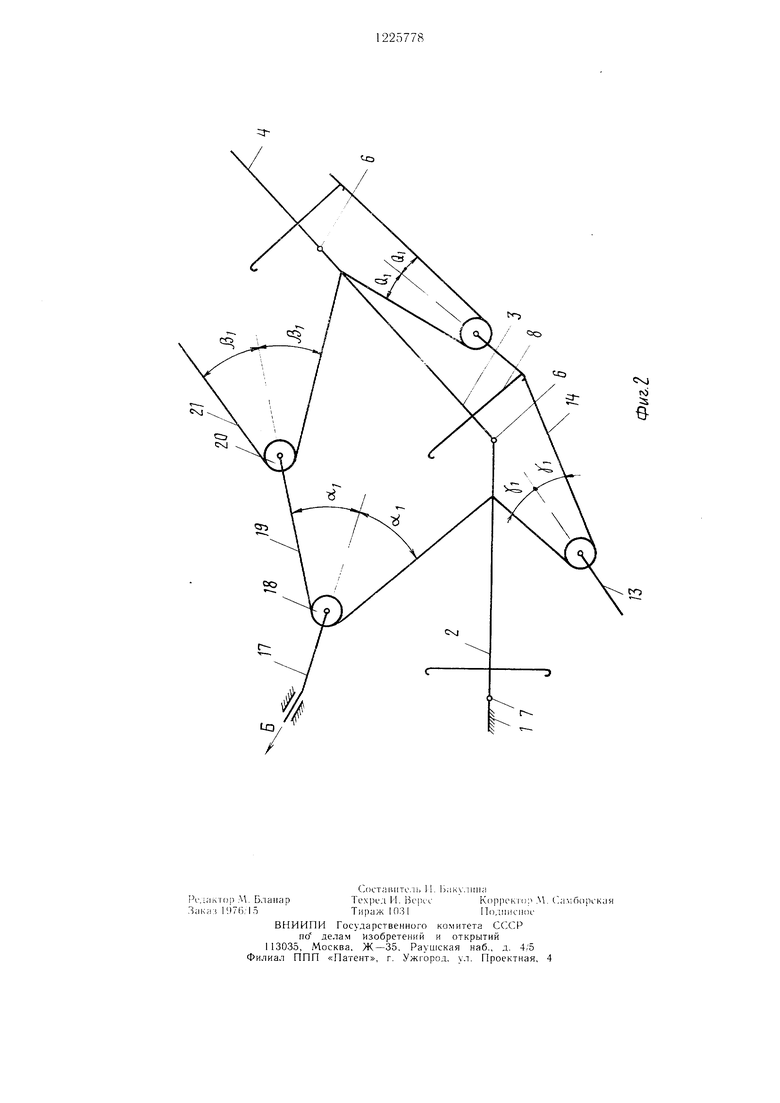
Ма фис. 1 изображена кинематическая схема руки манипулятора; на фиг. 2 - нро- межуточное но.южеиие смежных звеньев руки манипулятора.
Рука маиинулятора состоит из основания i, на котором установлены звенья 2-4 и конечное звено 5, на котором закреилен рабочий opi aii 6. С основание.м 1 и между собой звенья соединены с номощью ujapHH- ров 7. Каждый QjapHHp 7 снабжен устройством (j iKcaiuiH звеньев (не показан). На каждом звене 2-4 и конечном звене 5 установлена понеречная нлаетина 8. Привод (не показан) установлен на основании 1. Кинематическая связь звеньев между собой и с ирнводом обеспечивается трособлочными нередачами 9-16, число которых кратно числч звеньев.
Трос 17 трособлочной нередачи 9 одним концом соединен с приводом, а другим с осью блока 18 трособлочной передачи И). Трос 19 трособлочной передачи 10 одни.м концом соединен со звеном 2. а другим с осью блока 20 трособлочной нередачи 11.
Трое 21 трособ,точной передачи 11 одним концом соединен со звеном 3, а другим с осью блока 22 троеоблочной нередачи 12. Трое 23 троеоблочной нередачи 12 одним концом еоединен со звено.м 4, а другим с конечным звеном 5, несущим рабочий орган 6.
Все носледующие тросы и блоки тросо- блочных передач 13-16 установлены соответственно аналогичным трособлочным передачам 9-12. Тросы этих трособлочных передач имеют возможность контактировать с поперечными пластинами 8 звеньев 2-4 и конечного звена 5, так как в исходном положении они находятся на некотором уда- „чении 20 50 мм от скругленного края но- неречной пластины 8 этих звеньев.
Рука манипулятора работает следующим образом.
При необходимоети совершить движение любого из звеньев, например 3 и 4, относительно звена 2 против часовой стрелки, при этом, оставляя звено 2 неподвижным относительно основания 1 трос 17 пере.ме- щают в направлении стрелки Б (фиг. 2). Одновременно отключают устройство механической фиксации звена 3 относительно звена 2. Необходимо отметить, что еще до начала движения звеньев 3 и 4 тросы 17,
2
19, 21 и 23 находятся к .чатннутом с остоя- нии под действр:е.м си.1ы тяжести об ьекта мапипу. шрования. : ,ахвата i- самих )ев. что исключает их нровисапие и разрьш во времени между началом .твиженни троса 17 и кинематически связанным с ним россхм И). Устройства фиксации звена 2 ()т;|гк-и- тельно основания 1 и звена 1 отнесите.li,- lio звена 3 включены, это позво.1яет .тп- щать степени подвижности звено 2 от:и}сите.тьпо основания 1, связанных собой шарниром 7, и апа.югично звенья 3 и 4 при включенном устройстве фиксап.ип нрел.- ставляют собой цельное звено.
Трос трособлочпой г ередачи 13 свобо.чно, без натяжения устапов,теп относите. основапия 1.
Движущийся нод натяжением CJTHOCH- тельно основания 1 трос 17 передает движение блоку 18, который перемещает трос 19. Последний связан с блоком 20. поэтому
нрп движении троса 19 движетея и блок 20. Движение с блока 20 передается тросу 21. Последний одним концом соединен со звеном 3, а другим концом с последующим блоком 22, поэтому движущее усплие с троса 17 передается одновременно 2 через
трос 19 и удерживает его в исход|-;ом положении, звену 3 в точке крепления 21 и т.д. Причем величина натяжения в каждой последующей ветви уменьшается, так как, например, только векторная cyNiMa натяжений двух ветвей троса И) равна велпчине натяжения в троее 17. Поэтому активный момент, создаваемьп ветвью троса 19 в шарнире 7 меньше, че.м момент, создаваемый тросом 17 в шарнире 7, связываю1цем звено 2 с основанием 1. В шарнире 7 мен1)- ще и внешний момент, еоздаваемый весом
груза.
Благодаря предлагаемой констр кции: движущее усилие ео стороны троса 17 рас- преде.чяетея но длине манипулятора, концентрируясь в точках крепления ветвей тросов
к звеньям. Причем ве.чичина усилий, ирп- ложеппых со стороны тросов к :5веиья%, уменьшается по мере прибл1-;жеиия к рабочему органу. Поэтому звенья руки манипулятора практически пе испытывают изгибающих моментов, ввиду чего можно использовать устройства фиксации малой мощности, что позволяет им работать более надежно. Кроме того, у звеньев отсутствуют деформации изгиба, что позволяет повысить точность позиционирования.
Чтобы: обеспечить перемещение одного
из звеньев руки манипулятора относите.чьно другого звена против часовой стре. 1кп обеспечивается перемещение троса трособлочной передачи 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1984 |
|
SU1283077A1 |
| Манипулятор | 1986 |
|
SU1404324A1 |
| Рука манипулятора | 1985 |
|
SU1306705A1 |
| Копирующий манипулятор | 1980 |
|
SU901045A1 |
| Манипулятор | 1985 |
|
SU1283085A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Рука манипулятора | 1986 |
|
SU1333564A1 |
| Манипулятор | 1987 |
|
SU1517252A1 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| Задающий орган манипулятора | 1979 |
|
SU895639A1 |

| Уланов Р | |||
| Н | |||
| и Щербаков В | |||
| Д | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М.; Высншя , 1977, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
