Изобретение относится к робототехнике и предназначено для использования в конструкциях нромышленных роботов манипуляторов с большой степенью подвижности.
Цель изобретения - расширение технологических возможностей за счет кинематической развязки движений в шарнирах соединения звеньев.
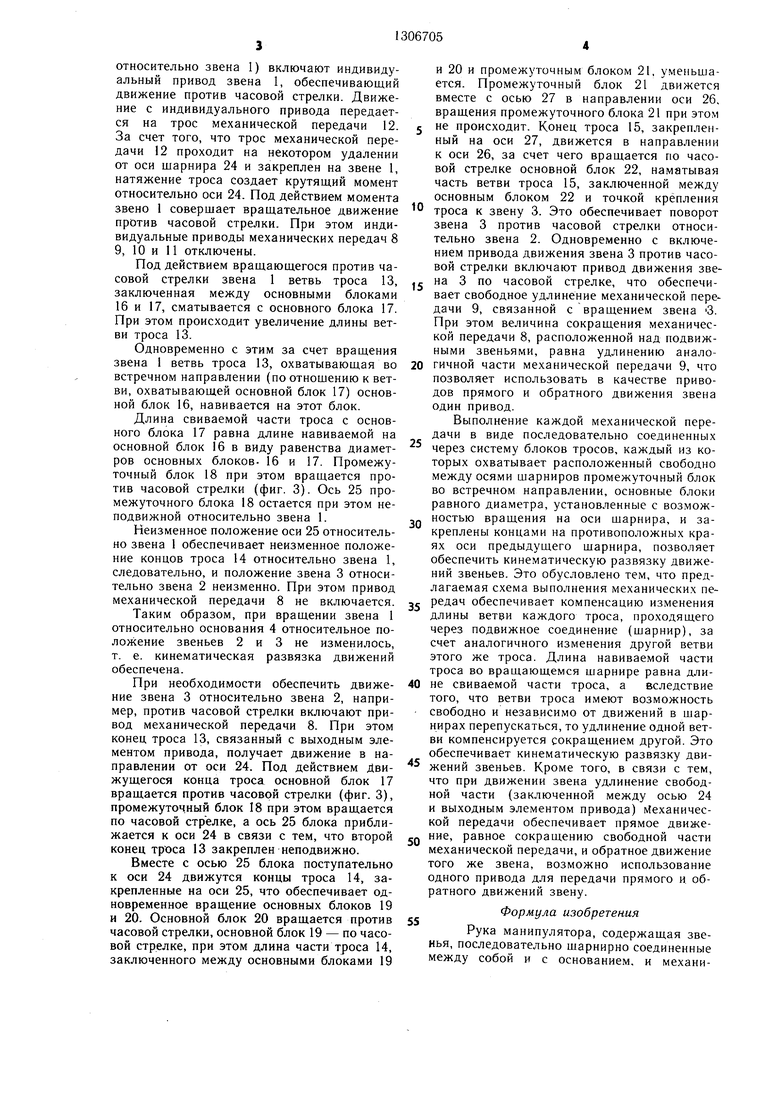
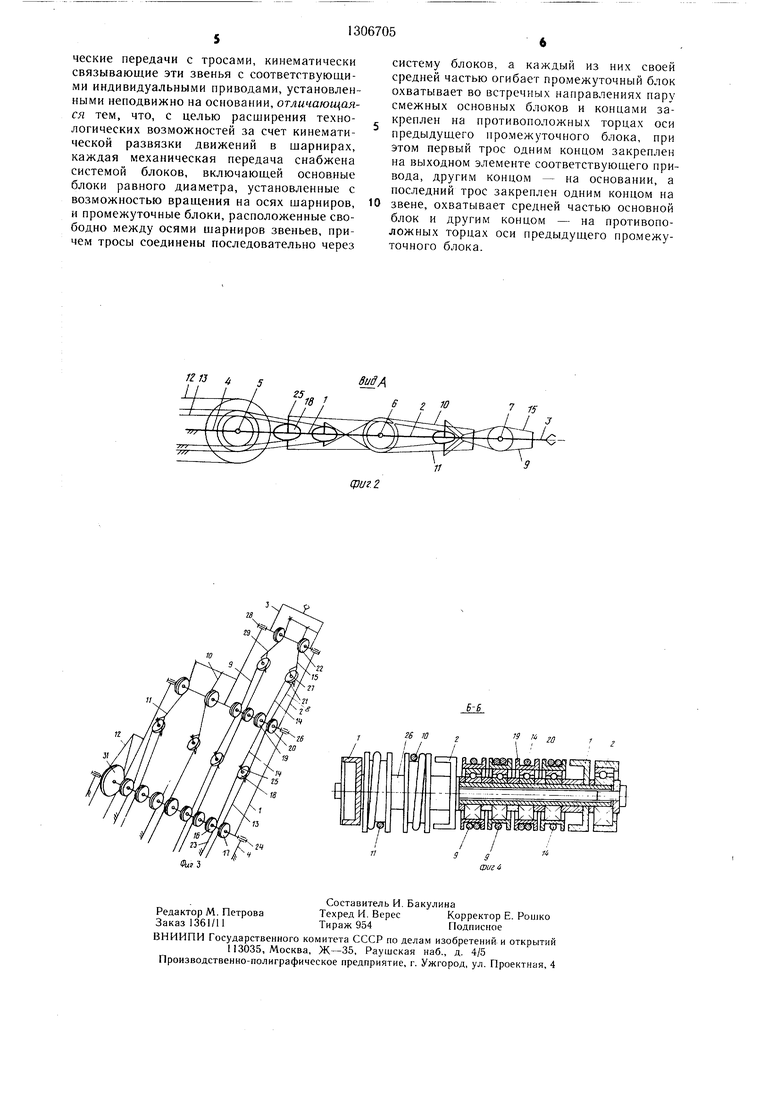
На фиг. 1 изображена кинематическая схема руки манипулятора; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - пространственное изображение руки манипулятора; на фиг. 4 - сечение Б-Б на фиг. 1.
Рука манипулятора содержит звенья 1, 2 и 3 и основание 4. Звенья последовательно соединены между собой и основанием шарнирами 5, 6 и 7.
Над звеньями расположены механические передачи с тросами, обеспечиваюш.ие прямое и обратное движения звеньев. Механические передачи 8 и 9 приводят в движение звено 3, механические передачи 10 и 11 обеспечивают прямое и обратное движения звена 2, а механическая передача 12 приводит в движение звено 1.
Каждая механическая передача представляет собой последовательно соединенные через систему блоков тросы. Механическая передача 8 состоит из тросов 13, 14 и 15, пары смежных основных блоков 16 и 17, промежуточного блока 18, пары смежных основных блоков 19 и 20, промежуточного блока 21 и основного блока 22. Первый (со стороны привода) трос 13 одним концом 23 (фиг. 3) закреплен на основании 4 и огибает основной блок 16 в направлении против часовой стрелки. Своей средней частью трос 13 огибает промежуточный блок 18, расположенный свободно между осями шарниров 5 и 6, охватывает основной блок 17 и закреплен на выходном элементе соответствуюш,его индивидуального привода (не показан).
Виток троса 13 на основном блоке 17 имеет направление, встречное тому, что имеет виток троса 13 на основном блоке 16. При этом точки схода витков троса 13 с основных блоков 16 и 17 расположены на противоположных краях этих блоков относительно оси шарнира 5. Основные блоки 16 и 17 имеют одинаковый диаметр и установлены с возможностью вращения на оси 24 шарнира 5. Виток троса 13 сходит с основного блока 16 в направлении промежуточного блока 18 и имеет направление, встречное (сход в нижней точке основного блока 16) витку троса, сходящему с основного блока 17 в направлении промежуточного блока 18 (сход троса 13 с основного блока 17 в верхней точке блока (фиг. 3).
Следующий за тросом 13 трос 14 закреплен своими концами на противоположных торцах оси 25 промежуточного блока 18. Трос 14 охватывает пару смежных основных блоков 19 и 20 во встречном направлении. Направление, образованное ветвью троса, идущей от оси 25 к основному блоку 19, встречно направлению ветви тро- са, идущей от противоположного торца оси
25к основному блоку 20. После схода с основных блоков 19 и 20 трос огибает своей средней частью промежуточный блок 21. Основные блоки 19 и 20 выполнены с одинаковыми диаметрами и установлены с
возможностью свободного вращения на оси
26шарнира 6 (фиг. 4). Промежуточный блок 21 расположен свободно между осями щарниров 6 и 7.
Последний (со стороны привода) трос 15, следующий за тросом 14, закреплен одним концом на оси 27 промежуточного блока 21, огибает основной блок 22, установленный на оси 28 приводимого в движение звена 3, и закреплен противоположным концом на звене 3.
0 Механическая передача 9, обеспечивающая вращение звена 3 по направлению движения часовой стрелки, выполнена аналогично механической передачи 8, лишь трос 29 идентичен тросу 15 и охватывает основной блок 30 во встречном направлении по 5 отношению к направлению охвата тросом 15 основного блока 22, что обусловлено необходимостью обеспечения направления вращения звена 3 в противоположную сторону (обеспечивается механической переда- чей 8).
Каждая механическая передача, обеспечивающая передачу движения предыдущему звену, содержит в своем составе на один расположенный свободно промежуточный блок и трос меньше по сравнению с меха- нической передачей, обеспечивающей передачу движения последующего звена.
Механические передачи 10 и 11 выполнены аналогично механическим передачам 8 и 9, но с меньшим числом расположенных свободно промежуточных блоков и 0 тросов.
Индивидуальный привод звена 1, щарнир- но связанного шарниром 5с основанием 4, располагается непосредственно на основании 4, поэтому необходимости в кинематической развязке, проходящей над шарни- ром 5, нет.
Прямое и обратное движения звену 1 пере даются через трос механической передачи 12, охватывающий основной блок 31, установленный на оси 24. Середина троса „ механической передачи 12 закреплена на звене 1, противоположные концы - на выходных элементах привода прямого и обрат-, ного направления.
Рука манипулятора работает следующим образом.
5 При необходимости повернуть звено 1 относительно основания 4, например, против часовой стрелки (при неизменном положении звена 3 относительно звена 2 и звена 2
относительно звена 1) включают индивидуальный привод звена 1, обеспечивающий движение против часовой стрелки. Движение с индивидуального привода передается на трос механической передачи 12. За счет того, что трос механической передачи 12 проходит на некотором удалении от оси шарнира 24 и закреплен на звене 1, натяжение троса создает крутящий момент относительно оси 24. Под действием момента звено 1 соверщает вращательное движение против часовой стрелки. При этом индивидуальные приводы механических передач 8 9, 10 и 11 отключены.
Под действием вращающегося против часовой стрелки звена 1 ветвь троса 13, заключенная между основными блоками 16 и 17, сматывается с основного блока 17. При этом происходит увеличение длины ветви троса 13.
Одновременно с этим за счет вращения звена 1 ветвь троса 13, охватывающая во встречном направлении (поотнощению к ветви, охватывающей основной блок 17) основной блок 16, навивается на этот блок.
Длина свиваемой части троса с основного блока 17 равна длине навиваемой на основной блок 16 в виду равенства диаметров основных блоков- 16 и 17. Промежуточный блок 18 при этом вращается против часовой стрелки (фиг. 3). Ось 25 промежуточного блока 18 остается при этом неподвижной относительно звена 1.
Неизменное положение оси 25 относительно звена 1 обеспечивает неизменное положение концов троса 14 относительно звена 1, следовательно, и положение звена 3 относительно звена 2 неизменно. При этом привод механической передачи 8 не включается.
Таким образом, при вращении звена 1 относительно основания 4 относительное положение звеньев 2 и 3 не изменилось, т. е. кинематическая развязка движений обеспечена.
При необходимости обеспечить движение звена 3 относительно звена 2, например, против часовой стрелки включают привод механической передачи 8. При этом конец троса 13, связанный с выходным элементом привода, получает движение в направлении от оси 24. Под действием Движущегося конца троса основной блок 17 вращается против часовой стрелки (фиг. 3), промежуточный блок 18 при этом вращается по часовой стрелке, а ось 25 блока приближается к оси 24 в связи с тем, что второй конец троса 13 закреплен неподвижно.
Вместе с осью 25 блока поступательно к оси 24 движутся концы троса 14, закрепленные на оси 25, что обеспечивает одновременное вращение основных блоков 19 и 20. Основной блок 20 вращается против часовой стрелки, основной блок 19 - по часовой стрелке, при этом длина части троса 14, заключенного между основными блоками 19
и 20 и промежуточным блоком 21, уменьшается. Промежуточный блок 21 движется вместе с осью 27 в направлении оси 26, вращения промежуточного блока 21 при этом
не происходит. Конец троса 15, закрепленный на оси 27, движется в направлении к оси 26, за счет чего вращается по часовой стрелке основной блок 22, наматывая часть ветви троса 15, заключенной между основным блоком 22 и точкой крепления
троса к звену 3. Это обеспечивает поворот звена 3 против часовой стрелки относительно звена 2. Одновременно с включением привода движения звена 3 против часовой стрелки включают привод движения звеC на 3 по часовой стрелке, что обеспечивает свободное удлинение механической передачи 9, связанной с вращением звена 3. При этом величина сокращения механической передачи 8, расположенной над подвижными звеньями, равна удлинению анало0 гичной части механической передачи 9, что позволяет использовать в качестве приводов прямого и обратного движения звена один привод.
Выполнение каждой механической передачи в виде последовательно соединенных
через систему блоков тросов, каждый из которых охватывает расположенный свободно между осями шарниров промежуточный блок во встречном направлении, основные блоки равного диаметра, установленные с возможностью вращения на оси щарнира, и закреплены концами на противоположных краях оси предыдущего щарнира, позволяет обеспечить кинематическую развязку движений звеньев. Это обусловлено тем, что предлагаемая схема выполнения механических пес редач обеспечивает компенсацию изменения длины ветви каждого троса, проходящего через подвижное соединение (щарнир), за счет аналогичного изменения другой ветви этого же троса. Длина навиваемой части троса во вращающемся шарнире равна длине свиваемой части троса, а вследствие того, что ветви троса имеют возможность свободно и независимо от движений в шарнирах перепускаться, то удлинение одной ветви компенсируется сокращением другой. Это обеспечивает кинематическую развязку дви жений звеньев. Кроме того, в связи с тем, что при движении звена удлинение свободной части (заключенной между осью 24 и выходным элементом привода) 1еханичес- кой передачи обеспечивает прямое движеQ ние, равное сокращению свободной части механической передачи, и обратное движение того же звена, возможно использование одного привода для передачи прямого и обратного движений звену.
Формула изобретения
Рука манипулятора, содержащая звенья, последовательно шарнирно соединенные между собой и с основанием, и механи5
ческие передачи с тросами, кинематически связывающие эти звенья с соответствующими индивидуальными приводами, установленными неподвижно на основании, отличающаяся тем, что, с целью расщирения технологических возможностей за счет кинематической развязки движений в щарнирах, каждая механическая передача снабжена системой блоков, включающей основные блоки равного диаметра, установленные с возможностью вращения на осях шарниров, и промежуточные блоки, расположенные свободно между осями ujapHHpOB звеньев, причем тросы соединены последовательно через
систему блоков, а каждый из них своей средней частью огибает промежуточный блок охватывает во встречных направлениях пару смежных основных блоков и концами закреплен на противоположных торцах оси предыдущего промежуточного блока, при этом первый трос одним концом закреплен на выходном элементе соответствующего привода, другим концом - на основании, а последний трос закреплен одним концом на звене, охватывает средней частью основной блок и другим концом - на противоположных торцах оси предыдущего промежуточного блока.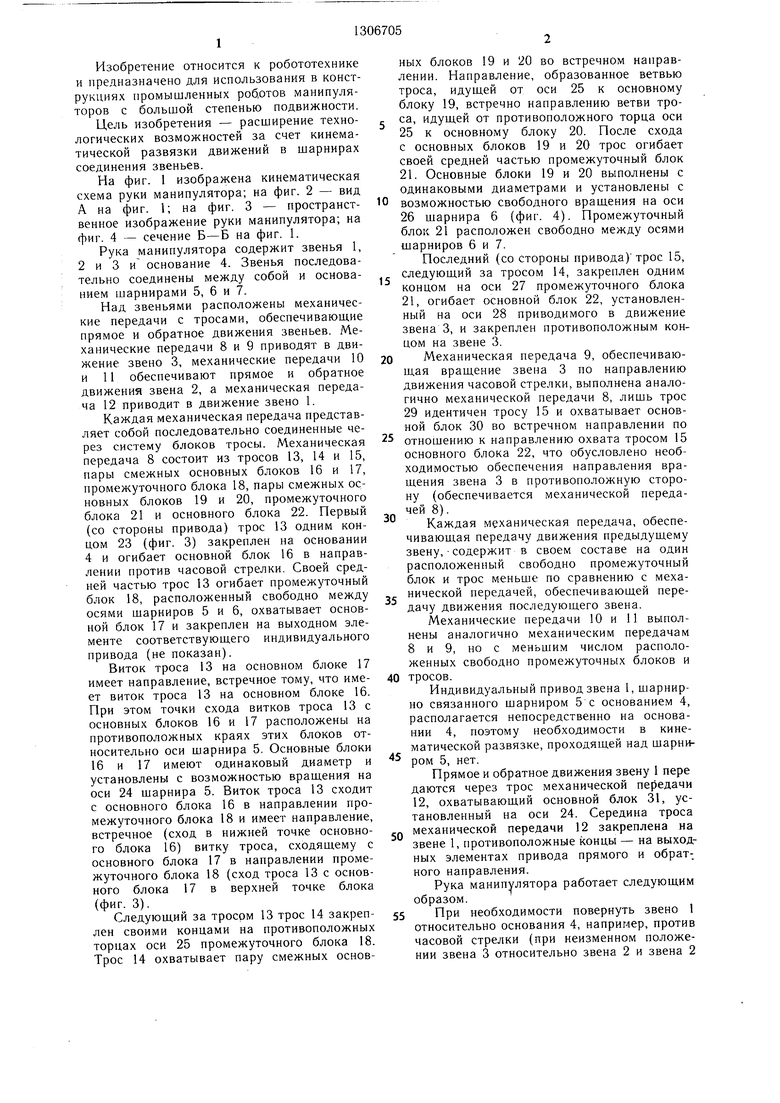
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1404324A1 |
| Рука манипулятора | 1986 |
|
SU1333564A1 |
| Исполнительный орган манипулятора | 1986 |
|
SU1323364A1 |
| Рука манипулятора | 1984 |
|
SU1225778A1 |
| Рука манипулятора | 1985 |
|
SU1263520A1 |
| Рука манипулятора | 1984 |
|
SU1283077A1 |
| Рука манипулятора | 1985 |
|
SU1321576A1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| Рука манипулятора | 1984 |
|
SU1248792A1 |
| Схват манипулятора | 1984 |
|
SU1184664A1 |
Изобретение относится к области робототехники и предназначено для использования в конструкциях промышленных роботов (манипуляторов) с большой степенью подвижности. Целью изобретения является расширение технологических возможностей за счет кинематической развязки движений в шарнирах соединения звеньев. Рука манипулятора содержит звенья I, 2 и 3, шар- нирно соединенные между собой и с основанием 4, механические передачи 8, 9, 10, 11 и 12, кинематически связываюшие эти звенья с соответствующими индивидуальными приводами. Каждая механическая передача, например механическая передача 8, снабжена системой блоков и тросами 13, 14 и 15, последовательно соединенными между собой. Каждый трос 14 охватывает своей средней частью промежуточный блок 21 и во встречных направлениях пару смежных основных блоков 19 и 20, установленных с возможностью врашения на оси шарнира 6. Концы троса 14 закреплены на противоположных торцах оси 25 предыдущего промежуточного блока 18. Первый трос 13 закреплен одни.м концом на индивидуальном приводе, а другим концом - на основании 4. Последний трос 15 закреплен одним концом на звене 3, а другим - на противоположных торцах оси предыдушего промежуточного блока 21. Каждая механическая передача предыдушего звена содержит в сво- е.м составе на один промежуточный блок .меньше по сравнению с механической передачей последующего звена. 4 ил. с SS (О со о Ot) о СП -J fiL., 2г Ц}и г. г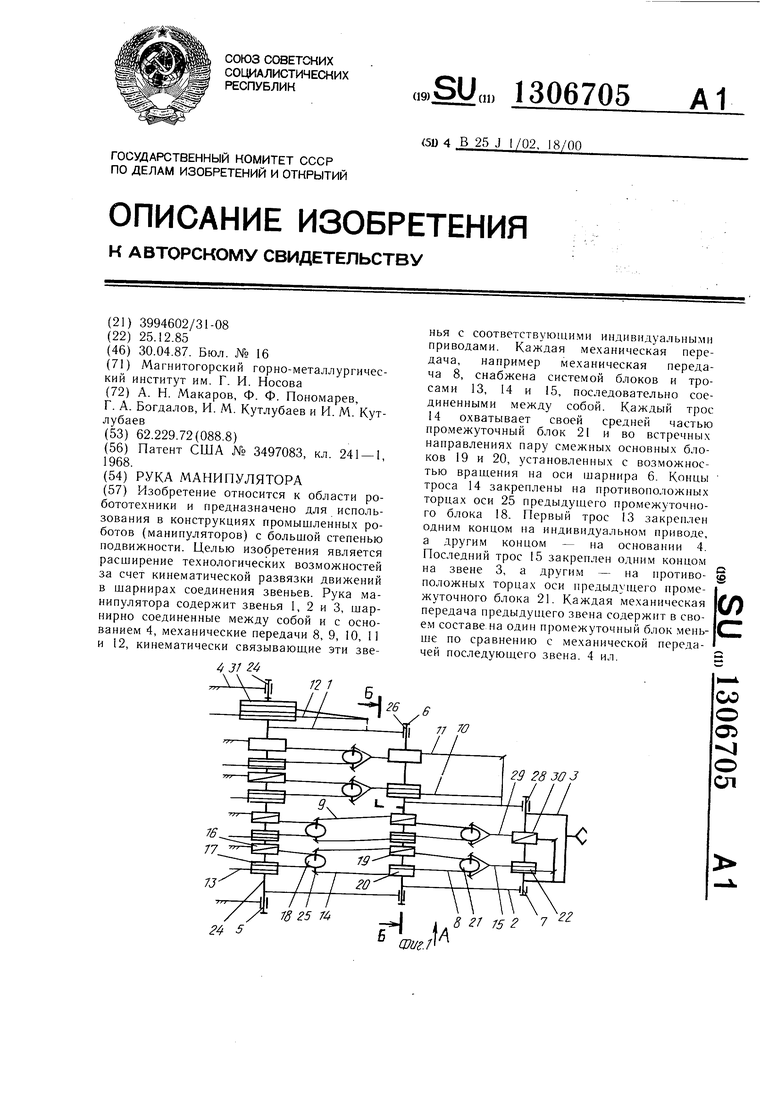
ffi/ffA
fS
Фиг 3
Редактор М. Петрова Заказ 1361/11
Составитель И. Бакулина Техред И. ВересКорректор Е. Рошко
Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Патент США № 3497083, кл | |||
| Одноколейная подвесная к козлам дорога | 1919 |
|
SU241A1 |
