Фиг. /
Изобретение относится к горнодобывающей промышленности, в частности к горным машинам, применяемым при добыче полезных ископаемых открытым способом.
Роторный экскаватор является ведущей горной машиной при открытом способе добычи, так как он обеспечивает отделение материала Ьт ма сс йва и его последующую транспортировку. При этом рабочий орган экскаватора (роторное колесо) и его электропривод воспринимают Vis забоя сложные механические нагрузки, определяемые физико-механическими свойствами экскави- руемого материала. Поэтому к приводу рабочего органа и к системе управления этим приводом предъявляются высокие требования по стабилизации момента на валу приводного двигателя.
Недостатком известных систем автоматизированного электропривода роторного колеса (1, 2) является отсутствие эффективной стабилизации нагрузки рабочего органа при изменяющемся моменте сопротивления резанию горной массы в процессе работы экскаватора.
Известное устройство (3), принятое в качестве прототипа, осуществляет стабилизацию нагрузки на роторное колесо и пред- отвращает стопорные режимы его приводного двигателя путем перекрестных обратных связей в системах управления приводами рабочего органа и поворота стрелы экскаватора.
Недостатком известной системы является отсутствие быстродействующей стаби- лизации нагрузки из-за того, что управляющее воздействие формируется не моментом сопротивления копанию, а реакцией на него, возникающей в системе.
Целью изобретения является повышение быстродействия системы стабилизации нагрузки рабочего органа экскаватора и защиты двигателя роторного колеса в стопорных режимах.
Указанная цель достигается тем, что система стабилизации нагрузки рабочего органа роторного экскаватора, включающая задатчик скорости вращения роторного колеса и блок управления приводом роторного колеса, отличающаяся тем, что с целью повышения быстродействия системы и защиты двигателя роторного колеса в стопорных режимах, она снабжена датчиками момента сопротивления копанию и предельного момента, блоком нелинейности, блоком дифференцирования и регулятором момента, при этом задатчик скорости вращения роторного колеса подключен к первому входу регулятора момента, датчик момента сопротивления копанию через
блок нелинейности подключен ко второму входу регулятора момента, датчик предельного момента через блок дифференцирования подключен к третьему входу регулятора
момента, выход которого подключен к блоку управления приводом роторного колеса.
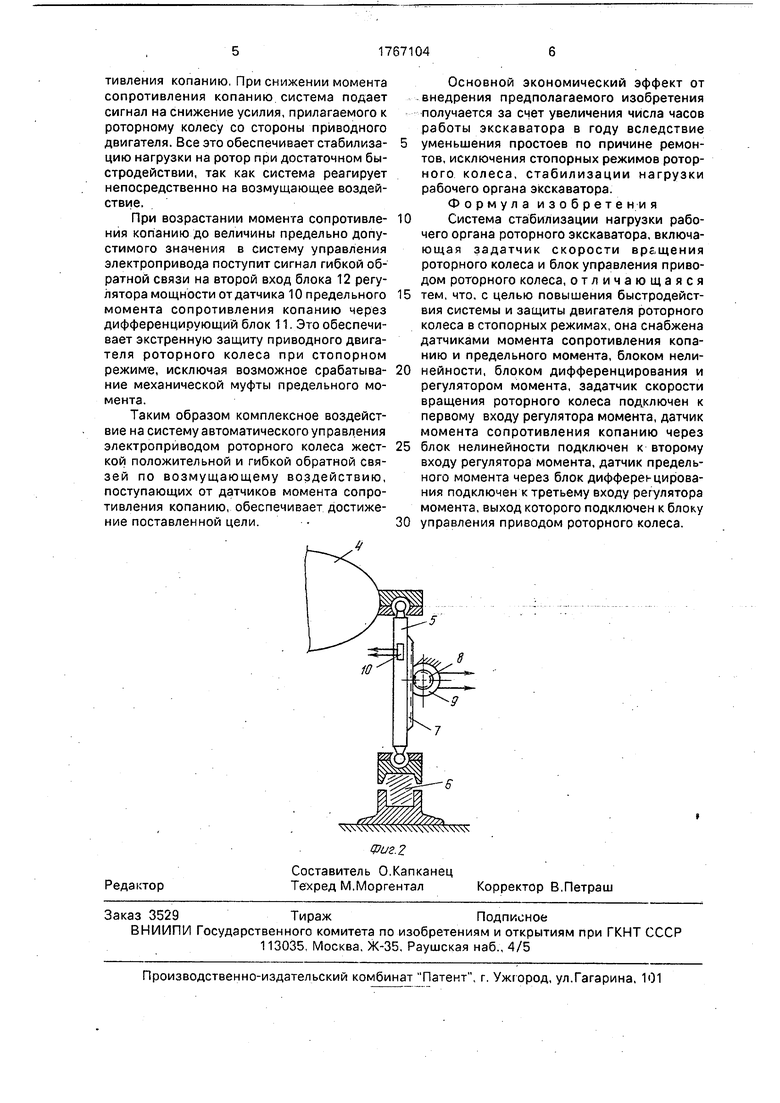
Изобретение поясняется чертежом, где на фиг. 1 показана структурная схема привода роторного колеса; на фиг. 2 показан узел
0 установки сельсинного и тензометрическо- го датчиков момента сопротивления копанию,
Система стабилизации нагрузки рабочего органа роторного экскаватора состоит
5 из серийно выпускаемых элементов, включает роторное колесо 1 с электроприводом 2, типовую систему управления электроприводом роторного колеса 3, регулятор 12 момента двигателя, датчик 9 мо0 мента сопротивления копанию с блоком нелинейности 14 и датчик 10 предельного момента с блоком 11 дифференцирования. Датчик 9 момента сопротивления копанию, представляющий собой сельсин, сое5 дииенный с тягой упругой подвески редуктора роторного колеса, выдает электрический сигнал, пропорциональный моменту сопротивления копанию, через блок 14 нелинейности типа нечувствительность
0 на третий вход регулятора 12 в виде положительной обратной связи по возмущению. Датчик 10 предельного момента (тензомет- рический датчик на тяге упругой подвески редуктора роторного колеса) через диффе5 ренцирующий блок 11 выдает сигнал, пропорциональный скорости нарастания момента сопротивления копанию, в виде гибкой обратной связи на второй вход регулятора 12 момента приводного двигателя
0 роторного колеса. К этому же регулятору, на первый вход подключен задатчик 13 скорости вращения роторного колеса.
Система стабилизации нагрузки рабочего органа экскаватора работает следую5 щим образом. Если при отработке горного массива момент сопротивления резанию возрастает, то возрастет и усилие на тягу упругой подвески 5 редуктора 4 роторного колеса. Под действием этого усилия тяга 5
0 переместится, сжимая пружину 6, что вызовет поворот ротора сельсина 9, включенного по трансформаторной схеме. С выхода сельсина 9 напряжение через блок 14 поступит на третий вход регулятора 12,отчего сигнал
5 управления, поступающий с регулятора 12 на вход системы управления 3, возрастает и приводной двигатель 2 увеличивает мощность до величины, достаточной для компенсации возмущающего воздействия, ванного возросшим моментом сопротивления копанию, При снижении момента сопротивления копанию система подает сигнал на снижение усилия, прилагаемого к роторному колесу со стороны приводного двигателя. Все это обеспечивает стабилиза- цию нагрузки на ротор при достаточном быстродействии, так как система реагирует непосредственно на возмущающее воздействие.
При возрастании момента сопротивле- ния копанию до величины предельно допустимого значения в систему управления электропривода поступит сигнал гибкой обратной связи на второй вход блока 12 регулятора мощности отдатчика 10 предельного момента сопротивления копанию через дифференцируюший блок 11. Это обеспечивает экстренную защиту приводного двигателя роторного колеса при стопорном режиме, исключая возможное срабатыва- ние механической муфты предельного момента.
Таким образом комплексное воздействие на систему автоматического управления электроприводом роторного колеса жест- кой положительной и гибкой обратной связей по возмущающему воздействию, поступающих от датчиков момента сопротивления копанию, обеспечивает достижение поставленной цели.
Основной экономический эффект от внедрения предполагаемого изобретения получается за счет увеличения числа часов работы экскаватора в году вследствие уменьшения простоев по причине ремонтов, исключения стопорных режимов роторного колеса, стабилизации нагрузки рабочего органа экскаватора.
Формула изобретения Система стабилизации нагрузки рабочего органа роторного экскаватора, включающая задатчик скорости вращения роторного колеса и блок управления приводом роторного колеса, отличающаяся тем, что, с целью повышения быстродействия системы и защиты двигателя роторного колеса в стопорных режимах, она снабжена датчиками момента сопротивления копанию и предельного момента, блоком нелинейности, блоком дифференцирования и регулятором момента, задатчик скорости вращения роторного колеса подключен к первому входу регулятора момента, датчик момента сопротивления копанию через блок нелинейности подключен к второму входу регулятора момента, датчик предельного момента через блок дифференцирования подключен к третьему входу регулятора момента, выход которого подключен к блоку управления приводом роторного колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления копающими механизмами экскаватора | 1981 |
|
SU1076549A2 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2107778C1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Устройство автоматического управления роторным экскаватором | 1988 |
|
SU1567726A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| Устройство для автоматического управления процессом копания роторного экскаватора | 1986 |
|
SU1421828A1 |
| Способ управления процессом копания одноковшового экскаватора | 1988 |
|
SU1664981A1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| Электропривод роторного экскаватора | 1986 |
|
SU1425285A1 |
Сущность изобретения: система содержит роторное колесо 1, электропривод 2, блок 3 управления приводом роторного колеса, регулятор 12 момента двигателя, датчик 9 момента сопротивления копания, блок 14 нелинейности, датчик 10 предельного момента, блок 11 дифференцирования, датчик 13 скорости сращения роторного колеса. 13-12-3-2-1, 9-14-12,10-11-12. 2 ил.
Редактор
Фиг 2
Составитель О.Капканец Техред М.Моргентал
Корректор В.Петраш
| Устройство автоматического управления роторным экскаватором | 1988 |
|
SU1567726A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
