Изобретение относится к электротехнике, в частности к моментным электродвигателям постоянного тока с ограниченным углом поворота ротора, и может быть использовано в прецизионных электроприводах, от которых требуется повышенный ресурс при работе на подвижном основании.
Целью изобретения является повышение надежности двигателя и плавности хода.
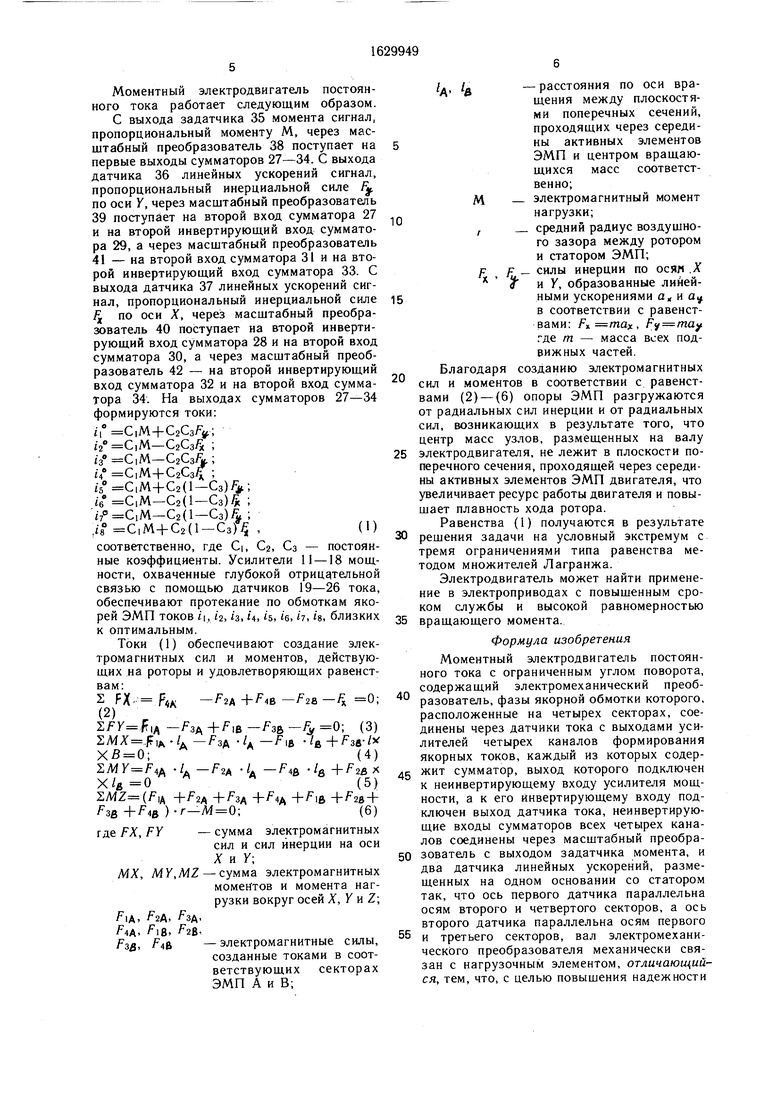
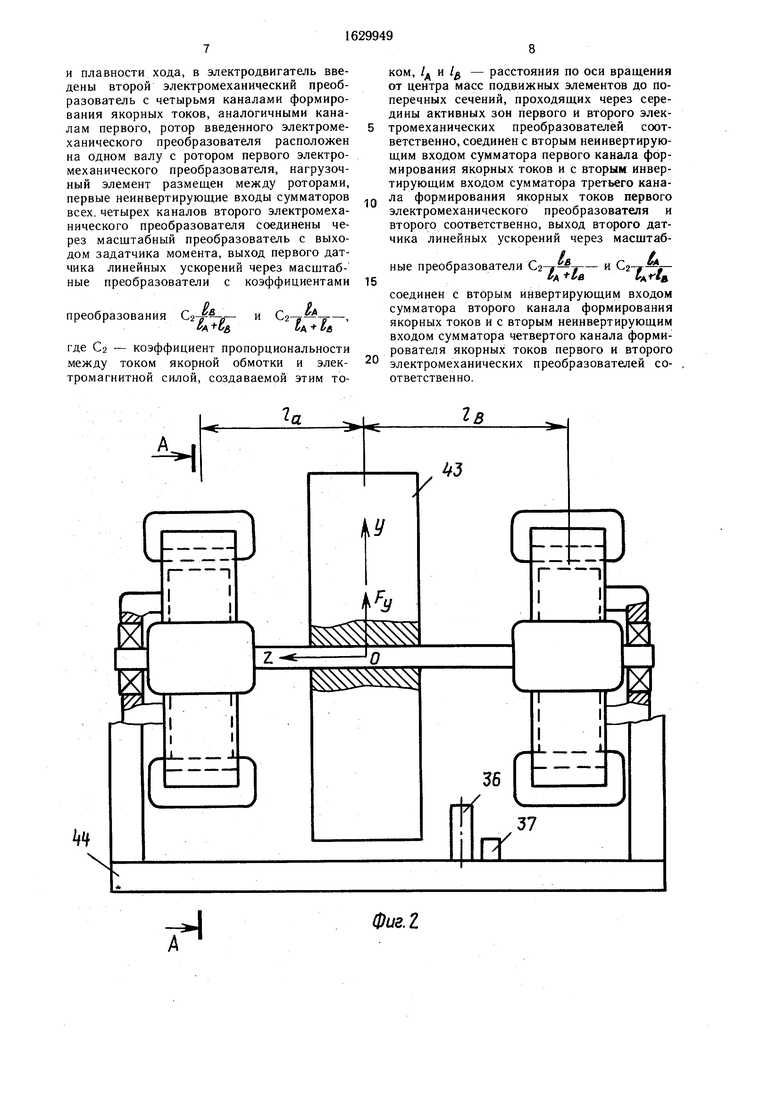
На фиг. 1 показана функциональная схема моментного электродвигателя постоянного тока; на фиг. 2 - взаимное расположение электромеханических преобразователей (ЭМП) моментного электродвигателя и нагрузки; на фиг. 3 - сечение А-А на фиг. 2.
Моментный электродвигатель постоянного тока (фиг. 1) состоит из двух ЭМП, в состав которых входят по четыре фазы 1-4 и 5-8 якорных обмоток ЭМП и роторы-индукторы 9 и 10. В состав моментного электродвигателя входят восемь усилителей 11 -18 мощности, восемь датчиков 19-26 тока, восемь сумматоров 27-34, задатчик 35 момента, два датчика 36 и 37 линейных ускорений и пять масштабных преобразователей 38-42. Сумматоры 27-34 вместе с усилителями 11 -18 мощности, датчиками 19- 26 тока и фазами 1-8 образуют восемь каналов формирования якорных токов.
Выход задатчика 35 момента подключен к входу масштабного преобразователя 38, выход которого подключен к первым неинвертирующим входам сумматоров 27-34 восьми каналов формирования якорных токов.
Выход датчика 36 линейных ускорений подключен к входам масштабных преобразователей 39 и 41. Выход датчика 37 линейных ускорений подключен к входам масштабных преобразователей 40 и 42. Выход масштабного преобразователя 39 подключен к второму неинвертирующему входу сумматора 27 и к второму инвертирующему входу сумматора 29.
Выход масштабного преобразователя 40 подключен к второму инвертирующему входу сумматора 28 и к второму неинвертирующему входу сумматора 30. Выход масштабного преобразователя 41 подключен к второму неинвертирующему входу сумматора 31 и к второму инвертирующему входу сумматора 33. Выход масштабного преобразо0 вателя 42 подключен к второму инвертирующему входу сумматора 32 и к второму неинвертирующему входу сумматора 34. Выходы сумматоров 27-34 подключены к первым неинвертирующим входам усилителей И -18
5 мощности соответственно, выходы которых соединены с обмотками 1-8 через датчики 19-26 тока, выходы которых подключены к вторым инвертирующим входам усилителей 11 -18 мощности соответственно.
Роторы обоих ЭМП моментного электро0 двигателя постоянного тока закреплены на одном валу, между роторами расположена нагрузка 43 (фиг. 2). Статоры обоих ЭМП закреплены на основании 44. На этом же основании крепятся датчики 36 и 37 линейных ускорений параллельно осям Y и X со5 ответственно. Центр координат совмещен с центром масс вращающихся узлов двигателя, который принимают расположенным на оси вала двигателя и в плоскости поперечного сечения нагрузки 43. Ось Z направлена по оси вала двигателя, оси А и К расположены в плоскости поперечного сечения нагрузки 43. Ось А направлена параллельно, а ось Y - перпендикулярно основанию 44. Силы, действующий на электродвигатель под воздействием ускорений, приложены к
5 центру масс всей системы. На фиг. 2 показана сила Ц,, , действующая при ускорении по оси Y.
Статор каждого ЭМП разделен на четыре сектора 45-48 (фиг. 3). На каждом секторе расположена одна обмотка. Оси
0 двух соседних секторов взаимно перпендикулярны и проходят через середины фазных зон собственных обмоток. Ось секторов 45 и 47 параллельна оси датчика 37 линейных ускорений, а ось секторов 46 и 48 параллельна оси датчика 36 линейных ускорений.
5 В каждом секторе в результате взаимодействия электромагнитного поля статора с ротором возникают электромагнитные усилия fiA - . iB 4в
0
Моментный электродвигатель постоянного тока работает следующим образом.
С выхода задатчика 35 момента сигнал, пропорциональный моменту М, через масштабный преобразователь 38 поступает на первые выходы сумматоров 27-34. С выхода датчика 36 линейных ускорений сигнал, пропорциональный инерциальной силе Fy. по оси Y, через масштабный преобразователь 39 поступает на второй вход сумматора 27 и на второй инвертирующий вход сумматора 29, а через масштабный преобразователь 41 - на второй вход сумматора 31 и на второй инвертирующий вход сумматора 33. С выхода датчика 37 линейных ускорений сигнал, пропорциональный инерциальной силе Fx по оси X, через масштабный преобразователь 40 поступает на второй инвертирующий вход сумматора 28 и на второй вход сумматора 30, а через масштабный преобразователь 42 - на второй инвертирующий вход сумматора 32 и на второй вход сумматора 34. На выходах сумматоров 27-34 формируются токи:
г,0 С|М-т-С2Сз/ ; ,M-C2C3/k ; ,М-С2С3.; и С,М+С2С3Ј ; 5в С|М+С2(1-С3); ,М-С2(1-С3)Ј ; i,,M-С2(1-С3)Ј; ,,М+С2(1-С3) ,(1)
соответственно, где Q, С2, Сз - постоянные коэффициенты. Усилители 11 -18 мощности, охваченные глубокой отрицательной связью с помощью датчиков 19-26 тока, обеспечивают протекание по обмоткам якорей ЭМП токов /|, /2 /з, /4, 5, is, h, is, близких к оптимальным.
Токи (1) обеспечивают создание электромагнитных сил и моментов, действующих на роторы и удовлетворяющих равенствам:2 FX F -Fa + - F2& -Ј 0;
,A -FaA+F.e-/-36- 0; (3) ,A./A-F3A -/A-F.B -Ib+Fwlx Xfi 0;(4)
./A -F2A ./д -F4B -l& + F2B x
2MZ(F,A +F2A +F3A +F4A +F,e +F2e + FaB+F4B)-r-M Q;(6)
где FX, FY -сумма электромагнитных сил и сил инерции на оси А и У;
MX, MY,MZ - сумма электромагнитных момейтов и момента нагрузки вокруг осей X, Y и Z; Fi, гД, зд,
/Чд. 18. 2ВFZ&, -электромагнитные силы, созданные токами в соответствующих секторах ЭМП А и В;
/А, 4
А- 1е
0
- расстояния по оси вращения между плоскостями поперечных сечений, проходящих через середины активных элементов ЭМП и центром вращающихся масс соответственно;
М электромагнитный момент
нагрузки;
, средний радиус воздушного зазора между ротором и статором ЭМП;
р р силы инерции по осял X х f и У, образованные линейными ускорениями а„ и а в соответствии с равенствами: , Fy may где т - масса всех подвижных частей.
Благодаря созданию электромагнитных сил и моментов в соответствии с равенствами (2) - (6) опоры ЭМП разгружаются от радиальных сил инерции и от радиальных сил, возникающих в результате того, что центр масс узлов, размещенных на валу 5 электродвигателя, не лежит в плоскости поперечного сечения, проходящей через середины активных элементов ЭМП двигателя, что увеличивает ресурс работы двигателя и повышает плавность хода ротора.
Равенства (1) получаются в результате 0 решения задачи на условный экстремум с тремя ограничениями типа равенства методом множителей Лагранжа.
Электродвигатель может найти применение в электроприводах с повышенным сроком службы и высокой равномерностью 5 вращающего момента.
Формула изобретения
Моментный электродвигатель постоянного тока с ограниченным углом поворота, содержащий электромеханический преоб0 разователь, фазы якорной обмотки которого, расположенные на четырех секторах, соединены через датчики тока с выходами усилителей четырех каналов формирования якорных токов, каждый из которых содер5 жит сумматор, выход которого подключен к неинвертирующему входу усилителя мощности, а к его инвертирующему входу подключен выход датчика тока, неинвертирующие входы сумматоров всех четырех каналов соединены через масштабный преобра0 зователь с выходом задатчика момента, и два датчика линейных ускорений, размещенных на одном основании со статором так, что ось первого датчика параллельна осям второго и четвертого секторов, а ось второго датчика параллельна осям первого
5 и третьего секторов, вал электромеханического преобразователя механически связан с нагрузочным элементом, отличающийся, тем, что, с целью повышения надежности
и плавности хода, в электродвигатель введены второй электромеханический преобразователь с четырьмя каналами формирования якорных токов, аналогичными каналам первого, ротор введенного электромеханического преобразователя расположен на одном валу с ротором первого электромеханического преобразователя, нагрузочный элемент размещен между роторами, первые неинвертирующие входы сумматоров всех четырех каналов второго электромеханического преобразователя соединены через масштабный преобразователь с выходом задатчика момента, выход первого датчика линейных ускорений через масштабные преобразователи с коэффициентами
преобразования ч-тг-д- и С2-р-- -,
М +Ь&4-д + Ьь
где С2 - коэффициент пропорциональности между током якорной обмотки и электромагнитной силой, создаваемой этим то0
ком, /А и /д - расстояния по оси вращения от центра масс подвижных элементов до поперечных сечений, проходящих через середины активных зон первого и второго электромеханических преобразователей соответственно, соединен с вторым неинвертирующим входом сумматора первого канала формирования якорных токов и с вторым инвертирующим входом сумматора третьего канала формирования якорных токов первого электромеханического преобразователя и второго соответственно, выход второго датчика линейных ускорений через масштаб
ные преобразователи €2
L
7А+Тв
и Crj&f- Јл«а
соединен с вторым инвертирующим входом сумматора второго канала формирования якорных токов и с вторым неинвертирующим входом сумматора четвертого канала формирователя якорных токов первого и второго электромеханических преобразователей соответственно
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный электродвигатель постоянного тока с ограниченным углом поворота | 1990 |
|
SU1757038A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1448373A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| МОМЕНТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2000 |
|
RU2192705C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
Изобретение относится к моментным электродвигателям постоянного тока с ограниченным углом поворота ротора Цель изобретения - повышение надежности двигателя и плавности хода. Электродвигатель содержит два электромеханических преобразователя (ЭМП), восемь каналов формирования якорных токов, пять масштаб
а
±л
г
IB
/
43
М
№
Фиг. I
А-А
Фие.З
| Электродвигатель | 1978 |
|
SU748702A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Моментный электродвигатель постоянного тока | 1988 |
|
SU1561161A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
