Изобретение относится к автоматизации технологических процессов и может найти применение для накопления деталей и поштучной выдачи их в металлорежущий станок или в зону схвата промышленного робота.
Целью изобретения является расширение функциональных возможностей магазина за счет обеспечения переналадки ловителей на разные диаметры деталей.
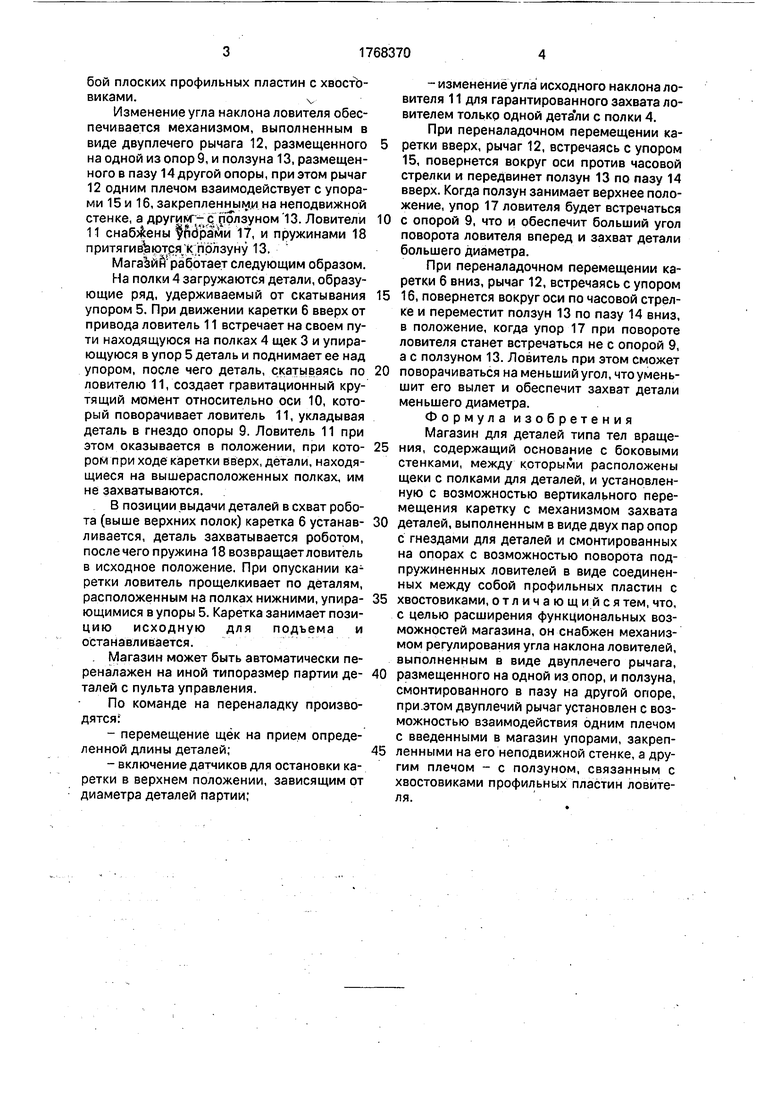
На фиг. 1 представлена пространственная структурно-кинематическая схема магазина; на фиг. 2 - вид по стрелке А на фиг. 1;
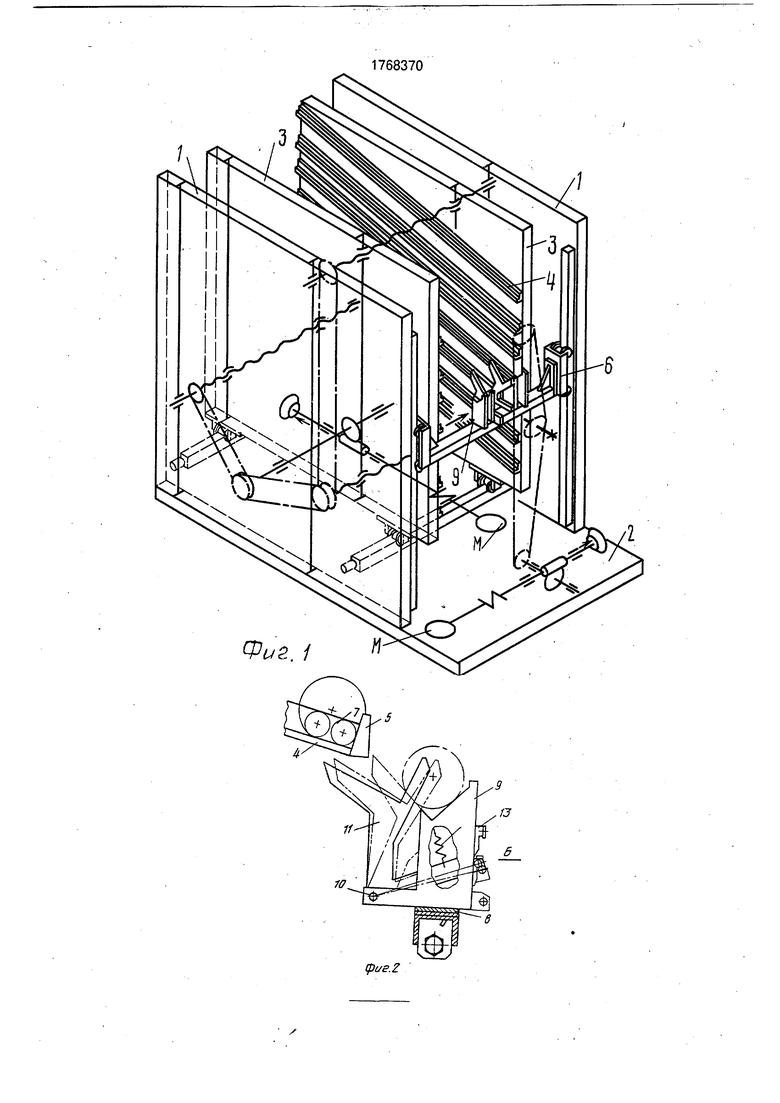
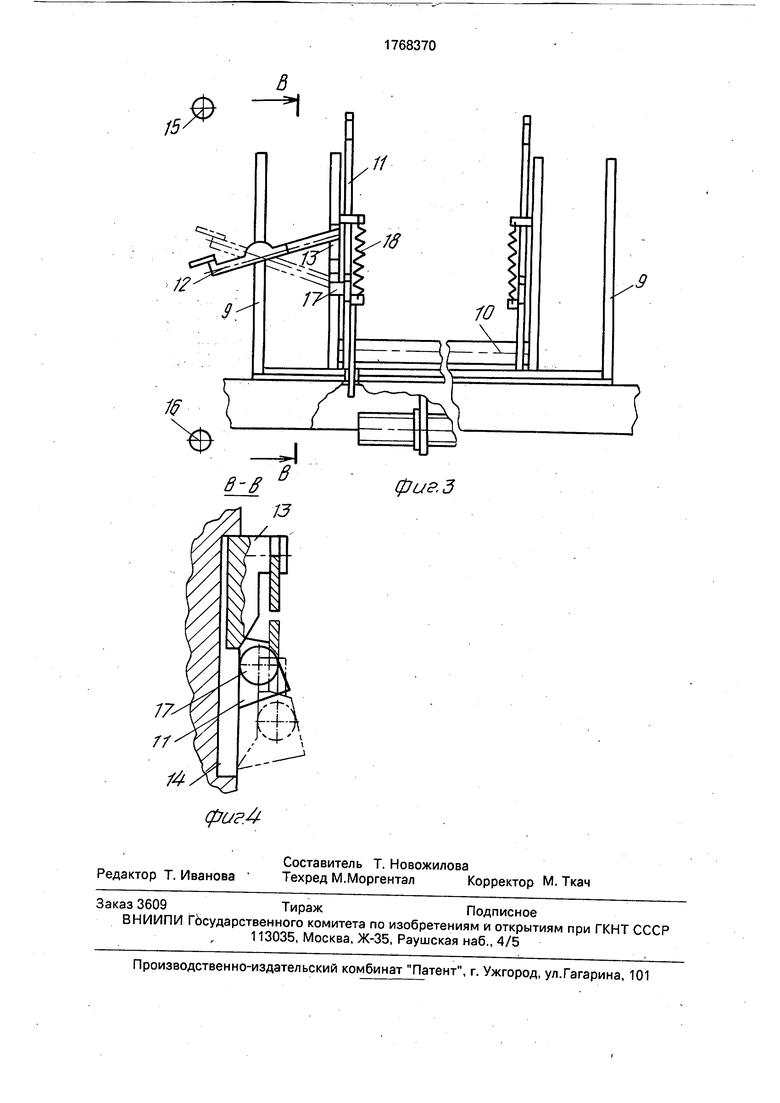
на фиг. 3 - вид по стрелке Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3.
Магазин для деталей типа тел вращения (валов) включает стенки 1, закрепленные на основании 2, и расположенные между стенками с возможностью перемещения щеки 3 с полками 4 и упорами 5, вертикально подвижную относительно стенок 1 каретку 6 с механизмом захвата деталей 7, имеющим основание 8, неподвижные опоры 9 с гнездами и поворотный в вертикальной плоскости относительно оси 10 подпружиненный ловитель 11 в виде соединенных между соVI
О 00
со VI о
бой плоских профильных пластин с хвостовиками.V
Изменение угла наклона ловителя обеспечивается механизмом, выполненным в виде двуплечего рычага 12, размещенного на одной из опор 9, и ползуна 13, размещенного в пазу 14 другой опоры, при этом рычаг 12 одним плечом взаимодействует с упорами 15 и 16, закрепленным на неподвижной стенке, а Другим ;-,с ррлзуном 13. Ловители 11 снабжены f горами 17, и пружинами 18 притягиваются; к,ползуну 13.
Магазйй работает следующим образом.
На полки 4 загружаются детали, образующие ряд, удерживаемый от скатывания упором 5. При движении каретки 6 вверх от привода ловитель 11 встречает на своем пути находящуюся на полках 4 щек 3 и упирающуюся в упор 5 деталь и поднимает ее над упором, после чего деталь, скатываясь по ловителю 11, создает гравитационный крутящий момент относительно оси 10, который поворачивает ловитель 11, укладывая деталь в гнездо опоры 9. Ловитель 11 при этом оказывается в положении, при кото- ром при ходе каретки вверх, детали, находящиеся на вышерасположенных полках, им не захватываются.
В позиции выдачи деталей в схват робота (выше верхних полок) каретка 6 устанав- ливается, деталь захватывается роботом, после чего пружина 18 возвращает ловитель в исходное положение. При опускании ка1 ретки ловитель прощелкивает по деталям, расположенным на полках нижними, упира- ющимися в упоры 5. Каретка занимает пози- цию исходную для подъема и останавливается.
. Магазин может быть автоматически переналажен на иной типоразмер партии де- талей с пульта управления.
По команде на переналадку производятся
-перемещение щёк на прием определенной длины деталей;
-включение датчиков для остановки каретки в верхнем положении, зависящим от диаметра деталей партии;
- изменение угла исходного наклона ловителя 11 для гарантированного захвата ловителем только одной дета ли с полки 4.
При переналадочном перемещении каретки вверх, рычаг 12, встречаясь с упором
15,повернется вокруг оси против часовой стрелки и передвинет ползун 13 по пазу 14 вверх. Когда ползун занимает верхнее положение, упор 17 ловителя будет встречаться с опорой 9, что и обеспечит больший угол поворота ловителя вперед и захват детали большего диаметра.
При переналадочном перемещении каретки 6 вниз, рычаг 12, встречаясь с упором
16,повернется вокруг оси по часовой стрелке и переместит ползун 13 по пазу 14 вниз, в положение, когда упор 17 при повороте ловителя станет встречаться не с опорой 9, а с ползуном 13. Ловитель при этом сможет поворачиваться на меньший угол, что уменьшит его вылет и обеспечит захват детали меньшего диаметра.
Формула изобретения Магазин для деталей типа тел вращения, содержащий основание с боковыми стенками, между которыми расположены щеки с полками для деталей, и установленную с возможностью вертикального перемещения каретку с механизмом захвата деталей, выполненным в виде двух пар опор с гнездами для деталей и смонтированных на опорах с возможностью поворота подпружиненных ловителей в виде соединенных между собой профильных пластин с хвостовиками, отличающийся тем, что, с целью расширения функциональных возможностей магазина, он снабжен механизмом регулирования угла наклона ловителей, выполненным в виде двуплечего рычага, размещенного на одной из опор, и ползуна, смонтированного в пазу на другой опоре, при.этом двуплечий рычаг установлен с возможностью взаимодействия одним плечом с введенными в магазин упорами, закрепленными на его неподвижной стенке, а другим плечом - с ползуном, связанным с хвостовиками профильных пластин ловителя.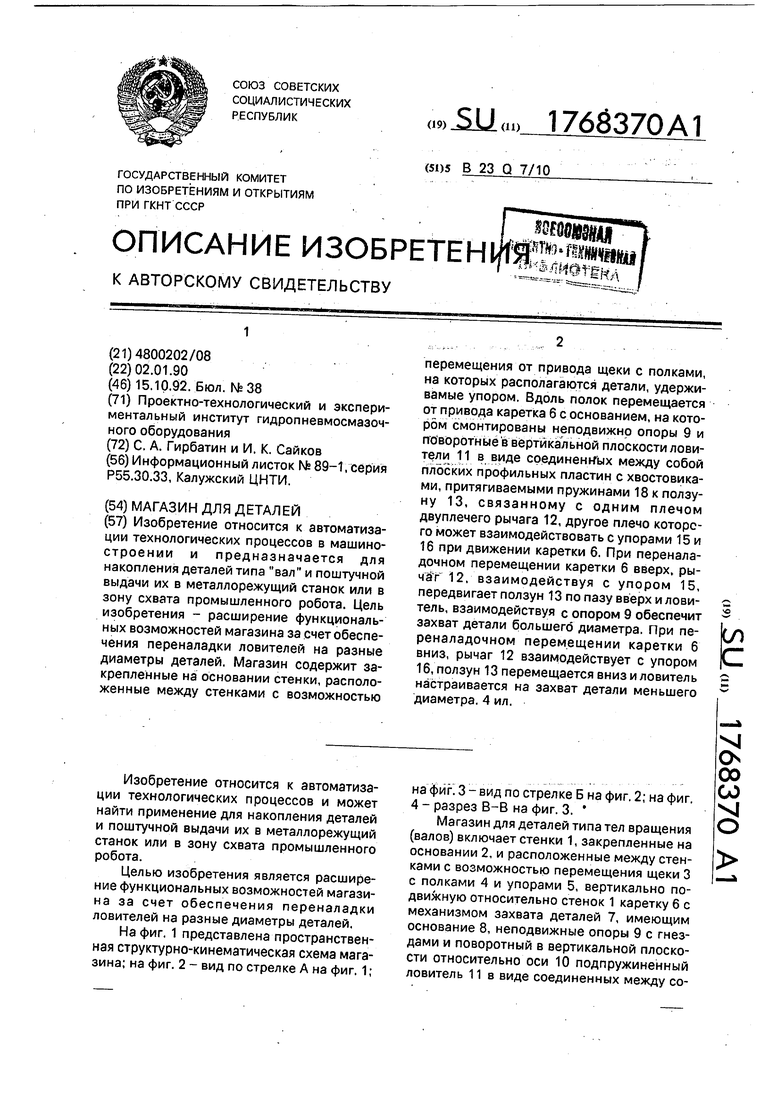
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Схват | 1986 |
|
SU1371904A1 |
| Фотокамера | 1982 |
|
SU1095125A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Устройство для термообработки изделий | 1986 |
|
SU1475933A1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
Изобретение относится к автоматизации технологических процессов в машиностроении и предназначается для накопления деталей типа вал и поштучной выдачи их в металлорежущий станок или в зону схвата промышленного робота. Цель изобретения - расширение функциональных возможностей магазина за счет обеспечения переналадки ловителей на разные диаметры деталей. Магазин содержит закрепленные на основании стенки, расположенные между стенками с возможностью перемещения от привода щеки с полками, на которых располагаются детали, удержи- вамые упором. Вдоль полок перемещается от привода каретка б с основанием, на котором смонтированы неподвижно опоры 9 и поворотные в вертикальной плоскости ловители 11 в виде соединенных между собой плоских профильных пластин с хвостовиками, притягиваемыми пружинами 18 к ползуну 13, связанному с одним плечом двуплечего рычага 12, другое плечо которого может взаимодействовать с упорами 15 и 16 при движении каретки 6. При переналадочном перемещении каретки 6 вверх, рычаг 12. взаимодействуя с упором 15, передвигает ползун 13 по пазу вверх и ловитель, взаимодействуя с опором 9 обеспечит захват детали большего диаметра. При переналадочном перемещении каретки 6 вниз, рычаг 12 взаимодействует с упором 16, ползун 13 перемещается вниз и ловитель настраивается на захват детали меньшего диаметра. 4 ил.
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
