оо
со
о
4;
И:(обрстенне относится к машиностроению и может быть использовано в качестве ;(а/кнмного нрисиособления и ром ьиш лен но го )обота И.1И манипулятора.
Целью изобретения является упрощение конструкции.
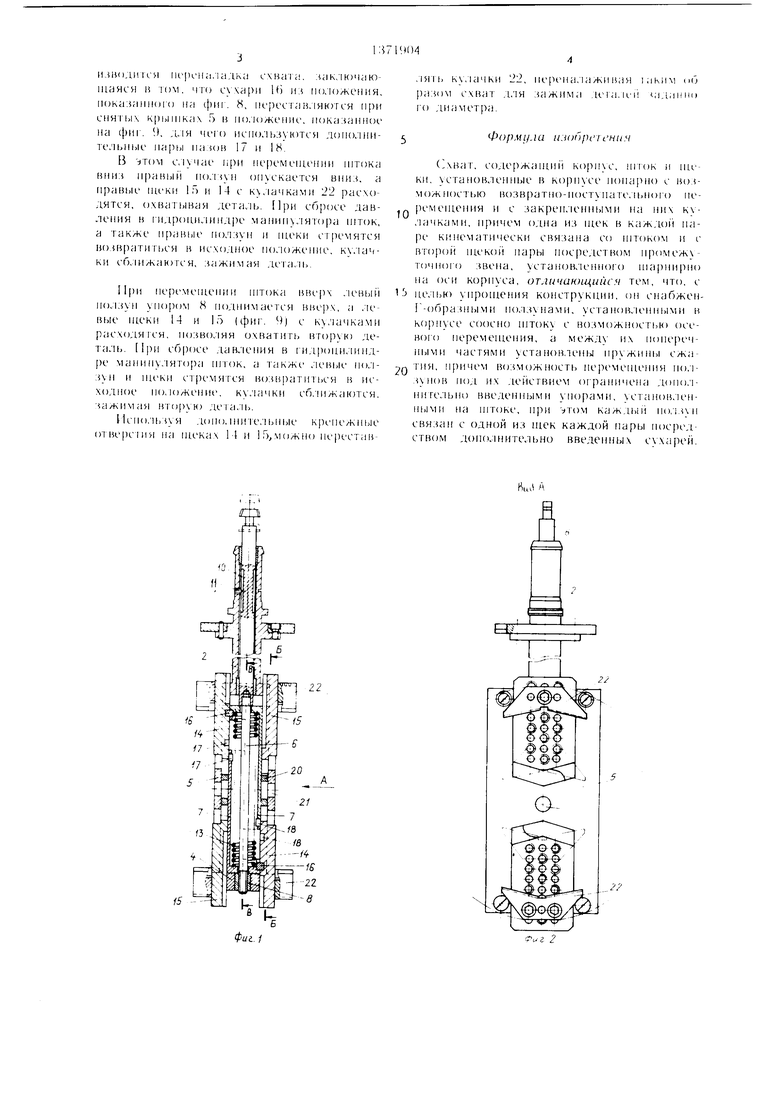
На фиг. 1 изображен нред.чагае.мый схват, нролп.ii.Hbiii oceBoii разрез (вариант сборки для зажима деталеГ за внутреннюю ни.минд- рическчк) новерхность); на фиг. 2 - вид А на (|)иг. I; на фи1 . )азрез Б-Б на ({)И. 1; на ())нг. 4разрез В-В на фи1 . 1; на
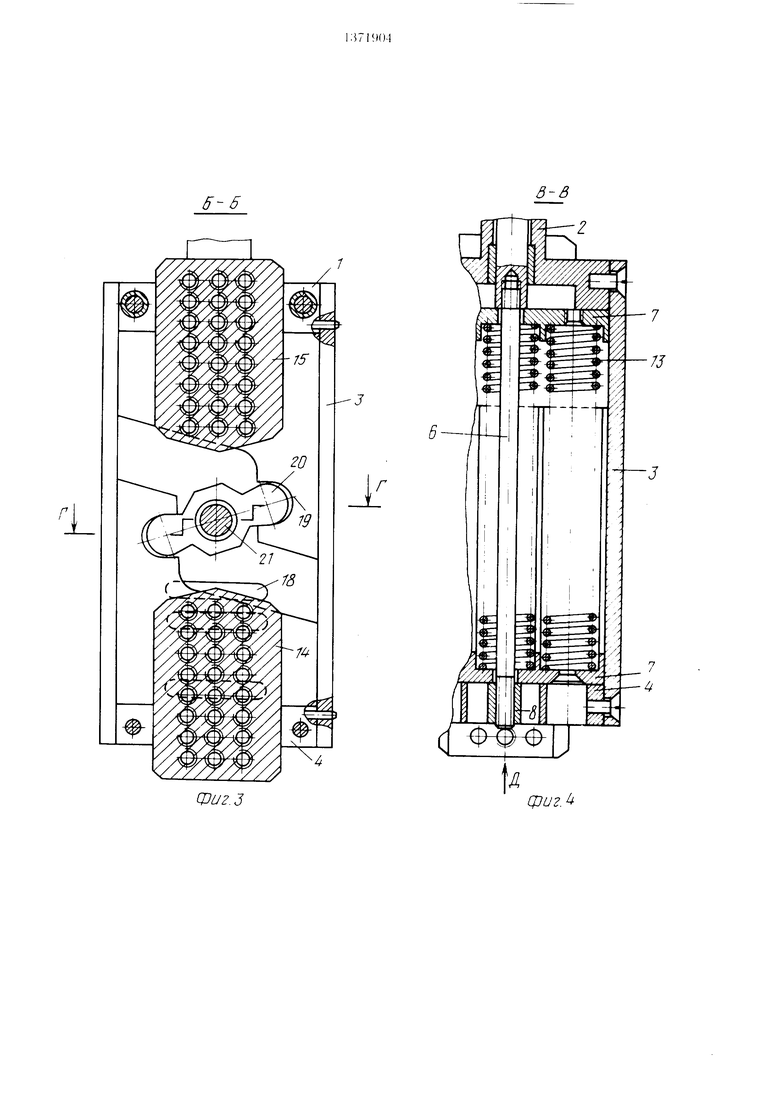
1()И1. Г) разрез Г-Г на (()И1. 3; на фиг. 6 вид Л на фиг. 4; на фиг. 7 - с.хематичес- кое и и)6ражение сборки Н1ек и нолзунов д. 1я :( деталей за внутреннюю ци.аннд- рическую ||()вер,ност1); на фиг . 8 схематическое изображение сборки щек и нолзунов для зажима деталей за наружную цилиндрическую новерхность.
(ват состоит из корпуса 1, образован- ного хвостовиком 2, н.ланками 3 и 4 и крьин- ками Г). К отверстии )стовика установлен ступенчаты HITOK 6, а в прямоугольной но- лости корпуса, образованной упомянутыми п.панками, установлены два Г-образных нол- ина 7. сопряженных внутренними поверхностями нродо.п.ных частей, а через coociUiie огверстия в поперечных частях ползунов проходит нток ti. Шток 6 своим бургом упирается в наружную поверхность noiiepennoii части верхнего ползуна. На рез1 бовом к(И1це П1тока () установлен упор 8 в виде гайки квадратно) формы. Упор 8 )аз- менн Н в пазу 9 n.ianKH 4. В верхней части П1ТОК I) снабжен продо.ьным пазом К), в Koropbiii входит установ,тенпый в хвостови- К1 2 вппт 11, предел В1)ап;аю1ций П1)ово- рог 1нгока. В ползунах 7 выполнены пазы в впде пол пи.пп1др()в, ()б) по. юстп 12. в когорых устаповлепы пружины 13 ежа- гия враспор относите/иди) поперечных час- leii no.riynoB 7. .ежду пол у}1ами 7 и крьпп- о уетапов,тено 1П) паре Ц(к 14 и 15. ИЦ ки 14 поередством сухарей К) связань с по.гп намп 7. Щеки 14 и ползуны 7 снабжены гакже дополните.льно парами пазов 17 и 1Н по размерам сухарей Ih. Щеки 14 п I i снабжены поперечными пазами 19, в когорые входят концы равноплечих |)ыча- ||)В 21, сганов.ленных поворотно на осях 21, чакр1МГ1енных в 11е|)емьпжах K)i inieK 5. Ila лпцевых сгоропах ПК К 14 и 15 закреп- лен|,| к}.1ачкп 22, нап|)пмер, в виде п|)изм и .1пены д()П()лппте,П)Ные отверстия д, 1я пере станпикп кулачков 22. Г авпоплсчие рычаги 2(1 размещены в полости между крьпп- камп 5 п по. супами 7.
IhieM пере 1аладк 1 схвата возмож 1о П1 но,лыован 1е его для дета.ич за rpeiuiKxo 1и1.ппдрическую оверхност
( nil (.
1, 2 3 п 8), а также д, 1я
5
5
5
0 О 5 Q
5
0
зажима деталей за наружную цилиндрическую оверхность (сборка о фиг. 7 и 9).
Схват работает образом.
Шток 6 привсиным гидроцилиндром манипулятора (не показа) может перемещаться вверх или , крайние оложения головки птока показан) 1трих- у ктирной . на фиг. 1.
При переме це ии вверх IITOK 6 через упор 8, 1реодолевая усилие 1ружин 13, юд- имает вверх по, 7, который че- ре.з правь Й сухар) 16 1одни.мает вверх ipa- ву) 1оку 14. Эта через паз 19 рово- рачивает рычаг 20, котор)Й вторым о ускает 1равук) пеку 15. Таким образом, прав)е цеки 14 15 сближаются в.месте с закре. 1е 1ными на их кулачка.ми 22. В этом о, ку. быть введены в отверстие зажимаемой детали. Переме це- ние цек 14 и 15 огра 1ичено перемычкой 5. При сбросе дав. в гидро- ма И улятора 1) 13 возвращают левый (олзун 7 вниз, щеки 14 и 15 1ри :)том начинают расходиться, а кулачки 22, у 1ираясь 1а)ужным 1 кромками во внут- )ю 1или дрнческую овер.ность дета- л, зажимают ее (. 2). При указанных еремеп1е ия. . олзуна 7 и связанных с К 1 ематически правых цек 14 и 15 олзу 7 И левые деки 14 и 15 остаются 1 еподвнжн). Д,тя зажима схватом 5торой дета. ток 6 от гидро- пп. ,ятора О уекается вниз. При Т()к () у 1рается своим буртом в равый олзун 7 и, реодолевая усилие
1руЖ 13, опускает е() ВПИЗ. Г1раВ Й ОЛзуп 7 через лев,Й сухарь 16 о 1ускает вниз ,1евую цеку 14. Эта 1ека, в свою очередь, поворачивает лев)Й д)у лечий , кото- Р,Й 1од 1мает вверх левую цеку 15. Та- образом, 11екп 14 и 15 с ку, кам1 22 сближаются. В 1оложе ии ку, 22 могут быг) введе1 в отверстие второй заж 1маемой детали. При сбросе давле 1 я в г дропили дре маниг у- лятора пружины 13 В() правый о,т- зу 7 вверх, лев,е 1.еки 15 и 14
:)ТОМ раСХОД Т.СЯ, а кулачки 22, раЯСЬ во В уТреННК)КЗ и ЛИ ДрИЧеСКуЮ Оверхн(к ть BTopoii детал, ее. При указа 1)1х 1 ерсмеп1епиях o,i- 7 и с)яза( с им ки ематически ле)Х щек 14 п 15.ieBbiii 1олзун 7 i U KH 14 и 15 е одвиж Ь ми с зажатой ранее дс : а.. П)и необходимост разжима детал и цеки перемеп1а- ются Т(жом, как перед зажимом. к -лачк 1 22 с левой iipaBoii сторо ы (в мосги от , какую деталь ужно отпусти )) сбл жаются. разжимая деталь.
Пр еобходпмост зажима дета, за 1а|П Жиую пи.ч 1 1дрпческую поверхЕюсть pi)и,В(),иг1Ч я in iiciia.ia. iKU схвага. :(ак, 1К)чаю- шаяся и ЮМ. чк) с a)ii Hi ли ю.южения, показанного на (jiiir. М, iit jicc гав.чяюгея (1)и снятых К|)ын1ках 5 в но.юженис , нока:(аин()1 на (|)иг. 9, для чего исчихмьзуются лоно.лни- Tt . ibHi.K нары па JOB 17 и 18.
В (.мучае п)и нсремсмцении ниока BHH:i HpaBbiii rio. iiyn опускается вниз, а npasibie теки 15 и 14с ку.1ачками 22 расходятся, охватывая дета;1ь. 1ри сбросе давления в гндро1и1.тинд|)е манину.тятора LHTOK, а также )ie нолзун и теки сг 1е 1ятся возврати гься в исходное ио.южение, ку.тачки сближаются, зажимая дета,1ь.
11|)и нере.хнмцеиин 1итока вве|)х ,1евыГ| иолзуи упором 8 поднимается вверх, а ,те- вые пк ки 14 и 15 |(})иг. )) с кулачками расходягся, иозво.тяя ох(атить вторую деталь. 1ри сбросе дав,тения в i идроци.тинд- )е манпиу.тятора HITOK, а также .тевьк по.т- зун и игеки (.л|)емягея воз ратиться в исходное положение, к, 1ачки сб.тижаются. зажимая вторую лега.И).
Используя доно, 1Н1 тел1Д1ые крепежные отве|)СП1я на пц ках 14 и 15,м(1жпо не|)естав0
.1ягь ку.1ачки 22, не 1еналажпвая 1аким об разом сх)ат д, 1Я зажима де1 алеи адаимо го диаметра.
Формула itiionpeiснчя
(хваг, содержаиии , шгок и nie ки. установленные в корпусе () с во.- можность,ю возвратно-посту нате.тьмого не- ()емеп1ения и с закреи,теин1)1ми на них кулачками, иричем одна из П1ек в каждой на- рс кинематически связана со HITOKOM и с игекой иары посредством иромежу- точпого звена, устанслпениого Hia)Hnpii() на осн корнуса, отличающийся тем, что. с не. 11)К) у11рои1ения конструкции, он снабжеп- Г-образиыми ползунами, уста}1овленп1)1ми в корпусе cooctio гптоку с возможностью осевого переменгепия, а между пх иымп частями установлены пружины сжа- Q тня, н)пчем возможность 11ереме1ие1Н1я no.i- .пнов нод их действием ограничена допо.т- пиге,тьпо введеппыми упорами, установ.1ен- ными на нггоке, прп VTOM каждый нол.(н связан с одной из HICK каждой пары посредством Д()пг.1лнительно введенных сухарей.
i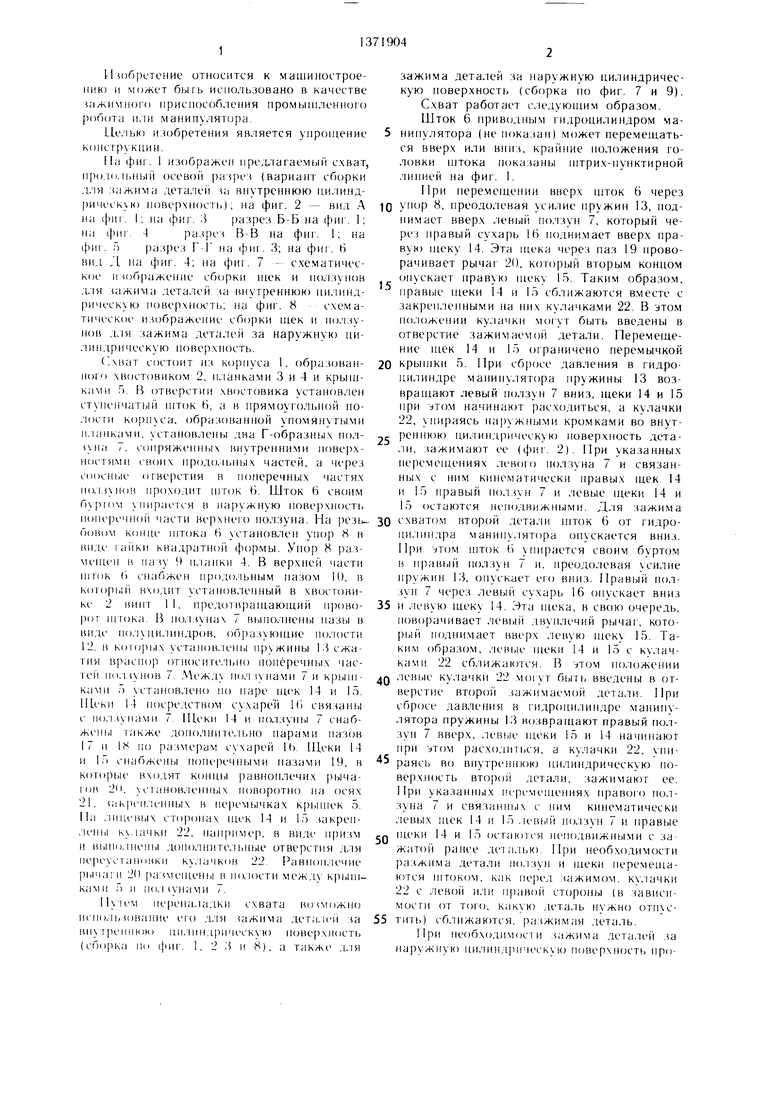
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод схвата манипулятора | 1986 |
|
SU1373566A2 |
| Схват промышленного робота | 1981 |
|
SU1014701A1 |
| Манипулятор | 1983 |
|
SU1110626A1 |
| Устройство для обработки плоских заготовок | 1987 |
|
SU1518060A1 |
| Швейная машина для сшивания чулочно-носочных изделий | 1957 |
|
SU109440A1 |
| Многопозиционный автомат | 1981 |
|
SU1047613A1 |
| Загрузочное устройство | 1987 |
|
SU1502247A1 |
| Устройство для сборки блоков(пакетов)радиоламп | 1954 |
|
SU103133A1 |
| ПРЕСС-АВТОМАТ ДЛЯ ДВУСТОРОННЕГО \ ХОЛОДНОГО ВЫДАВЛИВАНИЯВПТБ[^ ^^.'." 'з T't Г Г" Т f " .•' ''' '.'.. •;' iT' (^ 5 * | 1971 |
|
SU424647A1 |
| Зажимной патрон | 1985 |
|
SU1308434A1 |
11зоб)етепие относится к маишнострое- НИК) и может быть использовано в качестве зажимиого приспособления промыи1ленно о робота и 1анипулят(фа. Целью изобретения является уир()П1ение конструкции. Схват СОСТОЙ из корпуса, образованного хвостовиком 2. планк()11 4 и крьииками 5. В корпусе yciaiioEi.ien ипок 6 и два Г-образных ползуна /. На ползуне 7 посредством еухарей Гв установлены щеки 14, на которых установлены кулаки 22. Щеки 14 кинематически связаны со щеками 15 посредством двуплечих рычагов 20, установлент,1х на осях 21. При перемещении штока 6 вверх иереме- И1ается левый ползун 7, который через сухарь 16 поднимает правую И1еку 14. Эта щека посредством двуплечего рычага 20 опускает правую П1,еку 15. Кулаки 22 вводятся в отверстие захват1)1ваемой детали. При возврате штока 6 в исходное положение правые щеки 14 и 15 расходятся и происходит захват детали. При перемещении щтока 6 впиз аналошчно )аботают левые щеки 14 и 15. Таким образом, при возврате щтока 6 в исходное положение происходит захват второй детали. Для захвата де- тале11 за наружные поверхности сухари 16 устанавливаются в назь) 17 и 18. Работа схвата при это.м аналогична описаипой выше. 8 ил. SC сл
Ф Л. 1
ья;
4
.j
3-3
г
Г-Г
21
Сриг.5
дидЛ
CD и г. 6
