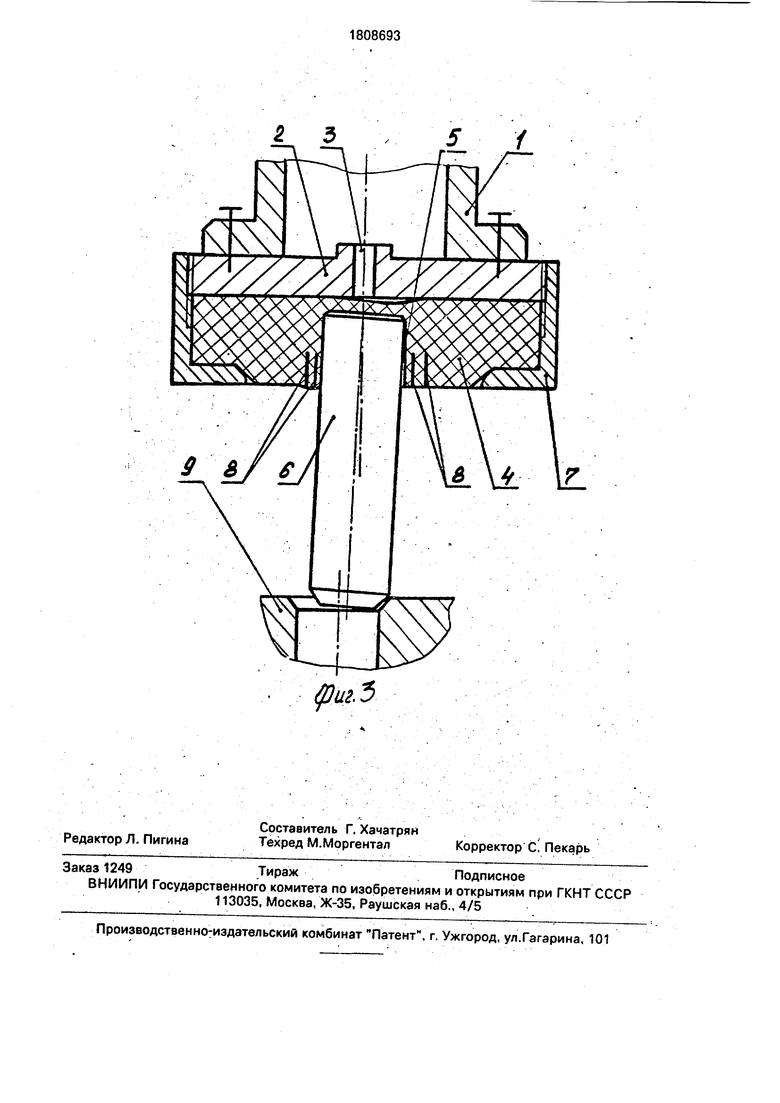
противлении между электродами 8 всех пар, после чего рука 1 опускает устройство, и деталь 6 входит без заклинивания в отверстие детали 9.
При выполнении сборочной операции свинчмвание резьбовых соединений (пар) возникает необходимость контролирования (измерения) величины противодействующего момента, вызванного силами сопротивления свинчиванию пары, и характеризующегося рядом геометрических и физических показателей. Противодействующий момент Mz передается через плртно зажатую в глухом отверстии 5 свин- чиваемую деталь (например, через головку винта, болта и т.п.) упругому элементу 4, приводя к деформации (сдвигу) примыкаю- щей к отверстию 5 его области. При этом подвергаются деформации и участки упругого электропроводного элемента 4 расположенные между электродами 8 соответствующих пар, что приводит, одновременно,, к взаимному сдвигу, последних относительно друг друга. Это в свою очереДь приводит к изменению электрических сопротивлений между электродами 8 пар, значения которых характеризуют величину вращающего осевого момента Mz. т,е. величину сил сопротивления свинчиванию. Сиг- , поступающие с выходов датчиков деформаций в систему управления промыш- лейным роботом, позволяют контролировать процесс надежного выполнения операции. При привышении момента Mz от допустимого своего значения (например, при заклинивании, заедании и т.п.) система управления вырабатывает сигнал экстренного останова.
При выполнении корпуса 2 с углублением со стороны поверхности соприкоснове- ния с упругим элементом 4 и регулируя давлением воздуха в полости устройства, мо|кно регулировать и одновременно про- избести измерение усилия зажатия детали. Или же, при этом можно произвести контролируемые осевые перемещения за- хвф«енной детали б в определенном диа- пэЗоне.
При удержании захваченной детали в горизонтальном положении можно опреде- лить ее вес. .
Имеются возможности определения формы (или отклонения формы) участка детали, взятого устройством. Если захвачена деталь с отклонением формы (например
вместо круглой формы имеется некоторая овальность), то разные датчики будут подвергаться разным деформациям, а сигналы на их выходах будут характеризовать форму (или степень ее отклонения) первой.
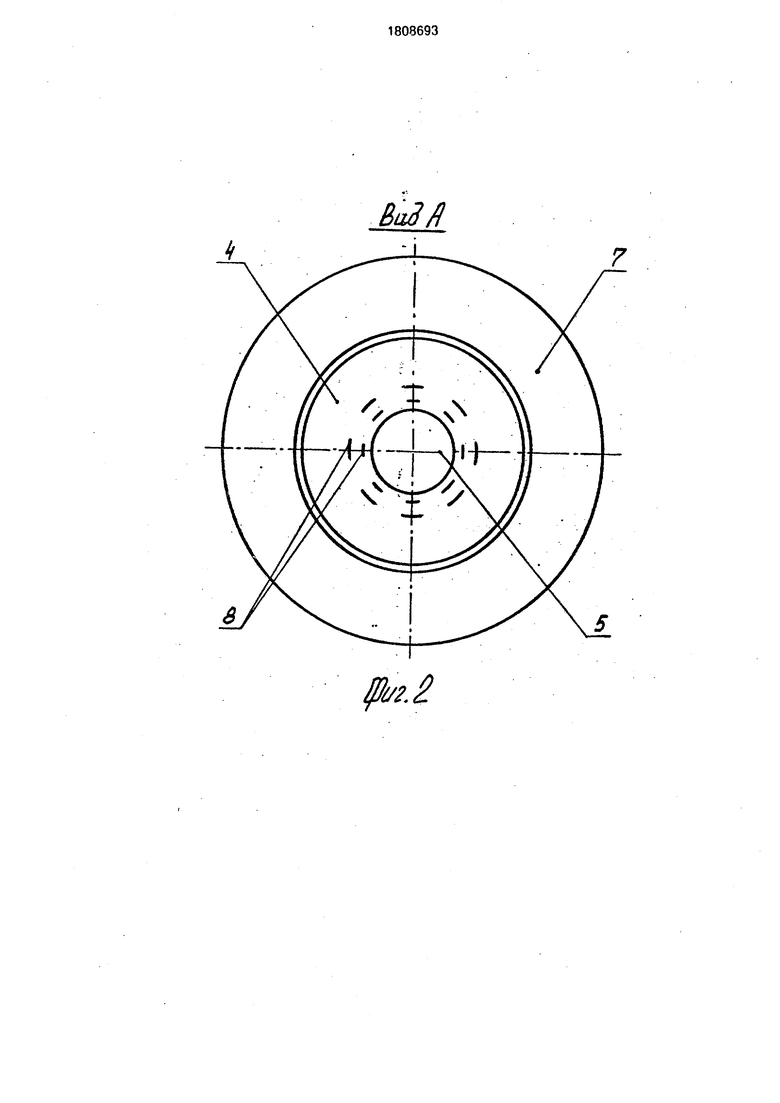
Сьемная крышка 7 позволяет при необходимости быстро заменить упругий элемент 4 на другой с другим диаметром или другой конфигурацией глухого отверстия 5. Можно также устанавливать пластины с различной степенью упругости и толщины.
Электроды датчиков деформаций могут быть встроены как в теле упругого элемента, выполненного целиком из электропроводного материала, так и в теле упругого элемента не выполненного целиком из электропроводного материала, а лишь имеющего участки из электропроводящего материала (электропроводной резины) между электродами пар датчиков.
Количество пар электродов может быть различным.
Устройство можно использовать для оснащения промышленных роботов, работающих в составе сборочных робототехнических комплексов. При этом данный промышленный робот получит возможность произвести точное измерение размера захваченной детали в определенном диапазоне их изменения, определить ее форму (или отклонение формы), вес и усилие зажатия, а также произвести сборочные операции на основе силовой обратной связи.
Формула изобретения
Очувствленное захватное устройство, содержащее цилиндрический полый корпус, в полости которого закреплен упругий элемент, образующий с внутренней поверхностью корпуса полость, соединенную с источником рабочей среды, при этом на рабочем торце упругого элемента в центральной его части выполнено глухое отверстие, кроме того, упругий элемент снабжен датчиками деформации, отличающееся тем, что, с целью расширения технологических, функциональных возможностей и повышения надежности в работе, датчики выполнены в виде пар электродов, встроенных в теле упругого элемента и расположенных равномерно вокруг глухого отверстия, причем электроды каждой пары расположены на концентричных окружностях, соосных с глухим отверстием, а между электродами каждой пары встроен участок из упругого электропроводного материала.
ВиЗД
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1990 |
|
SU1768383A2 |
| Исполнительный орган манипулятора | 1987 |
|
SU1493460A1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Устройство очувствления | 1986 |
|
SU1421535A1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1284767A1 |
| Инструмент для захвата, рассечения и/или коагуляции биологической ткани | 2016 |
|
RU2713962C2 |
| Сборочный комплекс | 1984 |
|
SU1240536A1 |
| Способ и система для определения по меньшей мере одного свойства манипулятора | 2014 |
|
RU2672654C2 |
| СБОРОЧНАЯ ГОЛОВКА | 1992 |
|
RU2035285C1 |
faj
