Изобретение относится к грузозахватным системам и может быть использовано в судостроении и судоремонте при изготовлении корпусных конструкций.
Известен магазин для сменного рабочего инструмента, выполненный в виде специального стеллажа, расположенного в зоне работы манипулятора.
Недостатком этого магазина является большое межоперационное вспомогательное время для смены рабочих органов, что способствует снижению производительности.
Прототипом предлагаемого технического решения может служить установка для изготовления корпусных конструкций, у которой магазин для сменного рабочего инструмента грузоподъемной траверсы - выполнен в виде полых вертикальных стоек с заходными клиновыми направляющими и вертикальными пазами в их нижней части, по крайней мере, попарно установленными, с внешней стороны каждой пролетной балки, смонтированными в них трособлочными устройствами, несущими траверсы с магнитами для подъема конструкций, установленные с возможностью размещения и фиксации в заходных клиновых направляющих и вертикальных пазах, при этом корпус грузоподъемного органа снабжен боковыми кронштейнами с призматическими опорами для взаимодействия с вышеупомянутыми траверсами при их подъеме и опускании.
Недостатком этого магазина является использование части рабочего хода грузоподъемного органа для установки траверс в магазин, что ведет к увеличению габаритов и массы конструкций установки, а также к увеличению рабочего хода грузоподъемного органа и соответственно времени на установку и снятие траверсы.
Цель изобретения - уменьшение габаритов и массы конструкции, сокращение времени на установку траверс в грузозахватную систему путем сокращения рабочего хода грузоподъемного органа.
Указанная цель достигается тем, что верхние блоки трособлочных устройств попарно установлены с внешней стороны каждой пролетной балки на общее основание,
V}
О 00
ь, ю о
которое смонтировано на рычагах, шарнир- но закрепленных к полым вертикальным опорам, к нижней поверхности общего основания прикреплены вертикальные штанги с возможностью взаимодействия их верхних поверхиостеЛ с нижней поверхностью общего основания.
Технических решений, содержащих признаки аналогичные с отличительными признаками гфёдлаг а емого технического решения в пр бцессё поиска.не обнаружены, что дает основание сделать заключение о существенности отличий предлагаемой совокупности признаков.
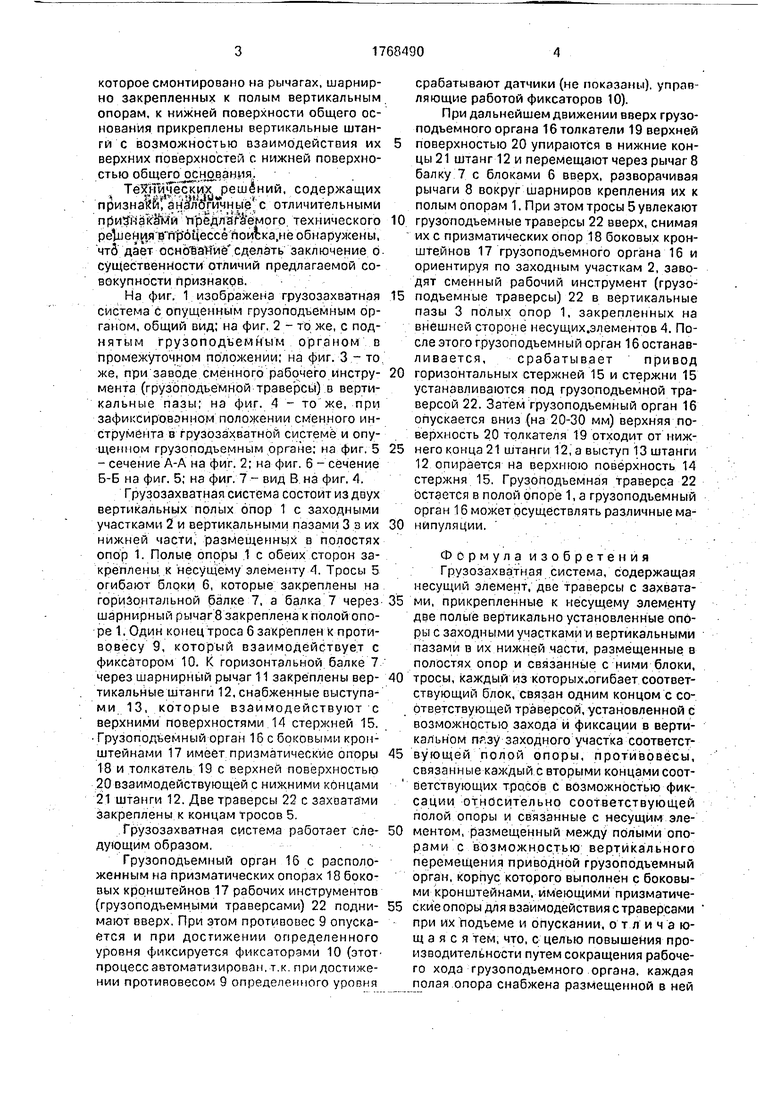
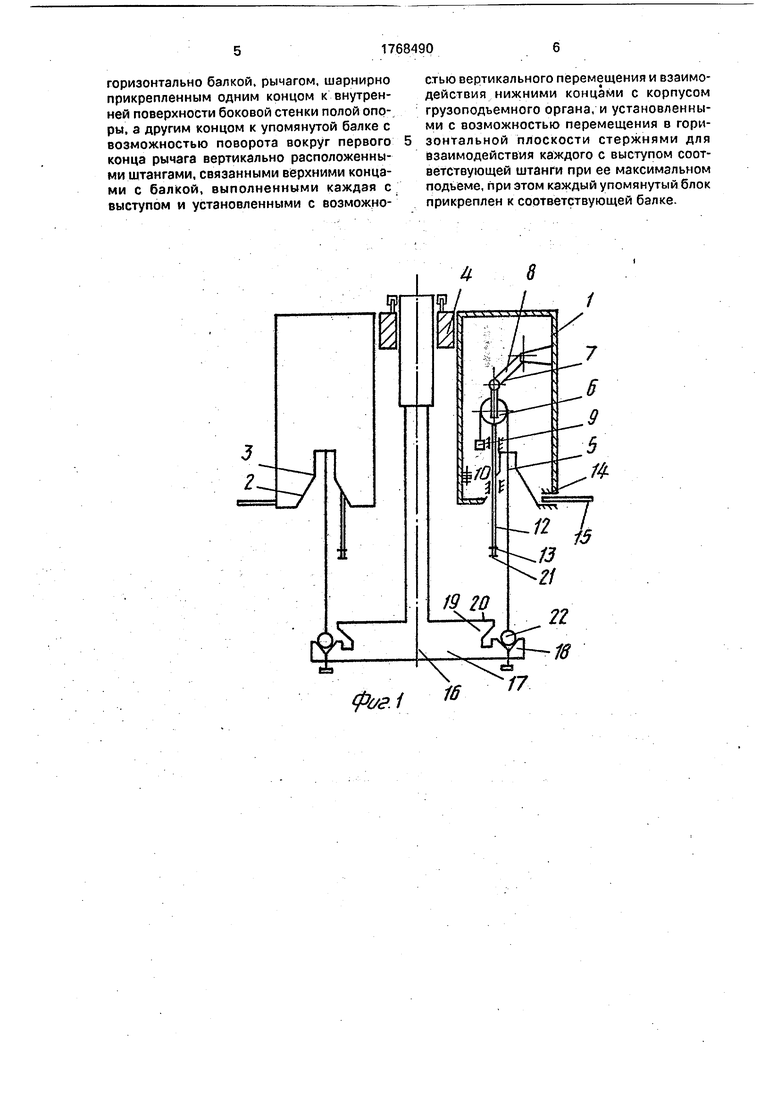
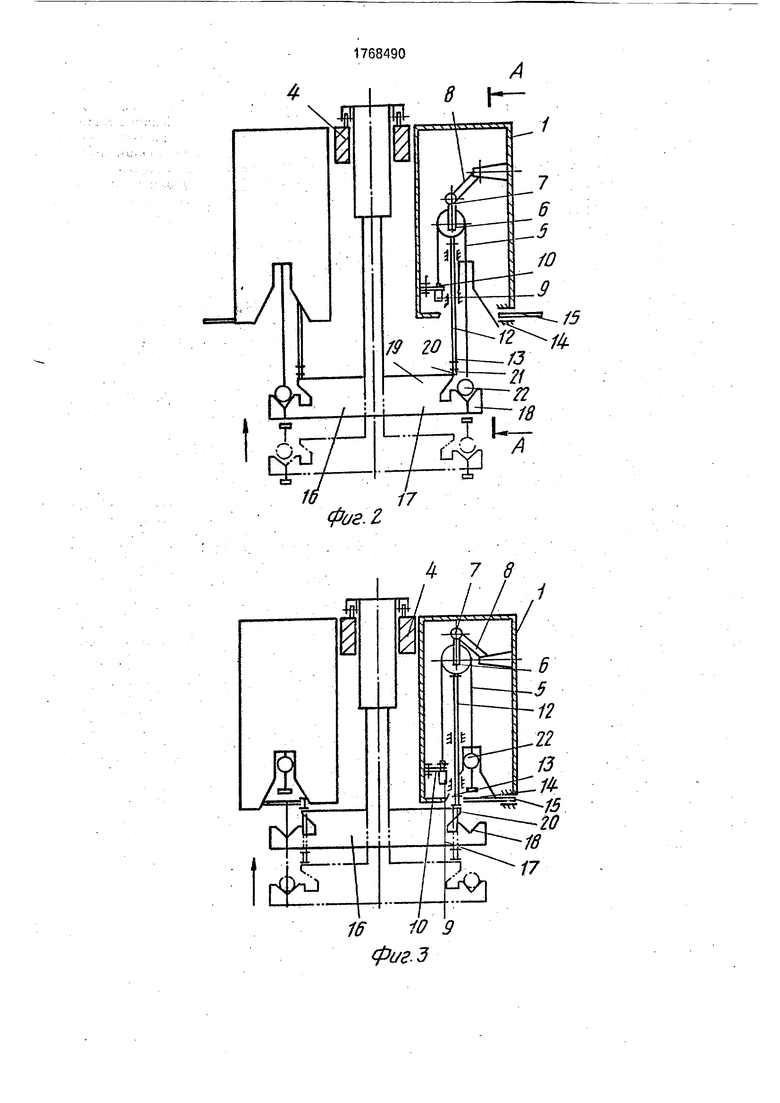
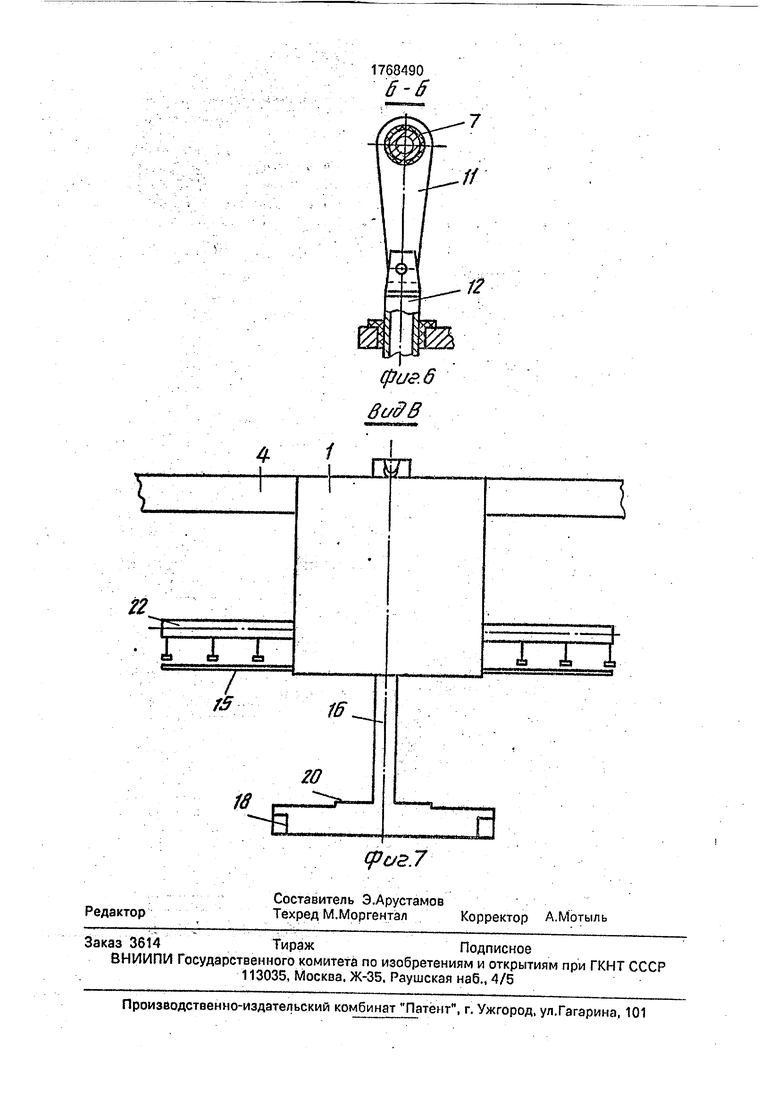
На фиг. 1 изображена грузозахватная система с опущенным грузоподъемным органом, общий вид; на фиг, 2 - то же, с под- нятым грузоподъемным органом с промежуточном положении; на фиг. 3 - то же, при заводе сменного рабочего инструмента (грузоподъемной траверсы) в вертикальные пазы; на фиг. 4 - то же, при зафиксированном положении сменного инструмента в грузозахватной системе и опущенном грузоподъемным органе; на фиг. 5 - сечение А-А на фиг. 2; на фиг. 6 - сечение Б-Б на фиг. 5; на фиг. 7 - вид В на фиг. 4.
Грузозахватная система состоит из доух вертикальных полых опор 1 с заходными участками 2 и вертикальными пазами 3 з их нижней части, размещенных в полостях опор 1. Полые опоры 1 с обеих сторон закреплены к несущему элементу 4. Тросы 5 огибают блоки 6, которые закреплены на горизонтальной балке 7, а балка 7 через шарнирный рычаг 8 закреплена к полой опоре 1. Один конец троса 6 закреплен к противовесу 9, который взаимодействует с фиксатором 10. К горизонтальной балке 7 через шарнирный рычаг 11 закреплены вертикальные штанги 12, снабженные выступами 13, которые взаимодействуют с верхними поверхностями 14 стержней 15. Грузоподъемный орган 16с боковыми кронштейнами 17 имеет призматические опоры 18 и толкатель 19 с верхней поверхностью
20взаимодействующей с нижними концами
21штанги 12. Две траверсы 22 с захватами закреплены к концам тросов 5
Грузозахватная система работает следующим образом.
Грузоподъемный орган 16 с расположенным на призматических опорах 18 боковых кронштейнов 17 рабочих инструментов (грузоподъемными траверсами) 22 поднимают вверх. При этом противовес 9 опускается и при достижении определенного уровня фиксируется фиксаторами 10 (этот процесс автоматизирован, т к при достижении противовесом 9 определенного уровня
срабатывают датчики (не показаны), управляющие работой фиксаторов 10).
При дальнейшем движении вверх грузоподъемного органа 16 толкатели 19 верхней
поверхностью 20 упираются в нижние концы 21 штанг 12 и перемещают через рычаг 8 балку 7 с блоками 6 вверх, разворачивая рычаги 8 вокруг шарниров крепления их к полым опорам 1. При этом тросы 5 увлекают
грузоподъемные траверсы 22 вверх, снимая их с призматических опор 18 боковых кронштейнов 17 грузоподъемного органа 16 и ориентируя по заходным участкам 2, заводят сменный рабочий инструмент (грузоподъемные траверсы) 22 в вертикальные пазы 3 полых опор 1, закрепленных на внешней стороне несущих.элементов 4. После этого грузоподъемный орган 16 останав- ливается, срабатывает привод
горизонтальных стержней 15 и стержни 15 устанавливаются под грузоподъемной траверсой 22. Затем грузоподъемный орган 16 опускается вниз (на 20-30 мм) верхняя поверхность 20 толкателя 19 отходит от нижнего конца 21 штанги 12, а выступ 13 штанги 12 опирается на верхнюю поверхность 14 стержня 15. Грузоподъемная траверса 22 остается в полой опоре 1, а грузоподъемный орган 16 может осуществлять различные манипуляции.
Формула изобретения Грузозахватная система, содержащая несущий элемент, две траверсы с захватами, прикрепленные к несущему элементу две полые вертикально установленные опоры с заходными участками и вертикальными пазами в их нижней части, размещенные в полостях опор и связанные с ними блоки,
тросы, каждый из которых.огибает соответствующий блок, связан одним концом с соответствующей траверсой, установленной с возможностью захода и фиксации в вертикальном пгзу заходного участка соответствующей полой опоры, противовесы, связанные каждый с вторыми концами соответствующих тросов с возможностью фиксации относительно соответствующей полой опоры и связанные с несущим элементом, размещенный между полыми опорами с возможностью вертикального перемещения приводной грузоподъемный орган, корпус которого выполнен с боковыми кронштейнами, имеющими призматические опоры для взаимодействия с траверсами при их подъеме и опускании, отличающаяся тем, что, с целью повышения производительности путем сокращения рабочего хода грузоподъемного органа, каждая полая опора снабжена размещенной в ней
горизонтально балкой, рычагом, шарнирно прикрепленным одним концом к внутренней поверхности боковой стенки полой опоры, а другим концом к упомянутой балке с возможностью поворота вокруг первого конца рычага вертикально расположенными штангами, связанными верхними концами с балкой, выполненными каждая с выступом и установленными с возможностью вертикального перемещения и взаимодействия нижними концами с корпусом грузоподъемного органа, и установленными с возможностью перемещения в горизонтальной плоскости стержнями для взаимодействия каждого с выступом соответствующей штанги при ее максимальном подъеме, при этом каждый упомянутый блок прикреплен к соответствующей балке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для изготовления корпусных конструкций | 1986 |
|
SU1556997A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| ВЫСОКОСКОРОСТНОЙ МЕТАЛЛОРЕЖУЩИЙ ПЯТИКООРДИНАТНЫЙ ЦЕНТР С ТРИПОД-МОДУЛЕМ | 2005 |
|
RU2285602C1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU213307A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| ТРАВЕРСА | 2017 |
|
RU2661671C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
Цель: уменьшение габаритов и массы конструкции, сокращение времени на установку траверс в полую опору путем сокращения рабочего хода грузоподъемного органа. Сущность изобретения: блоки попарно установлены с внешней стороны несущего элемента на балках, которые смонтированы на рычагах, шарнирно закрепленных на полых вертикальных опорах. К штанге прикреплены выступы с возможностью взаимодействия с верхней поверхностью стержней, а грузоподъемный орган снабжен толкателями с возможностью взаимодействия их верхних поверхностей с нижними концами штанг, 7 ил.
фиг.1
LI
/
В L
. J
asfcfc
5Ь
(ри&.б вс/дЗ
| Приспособление для передачи на поезд и с него жезлов и небольших посылок | 1924 |
|
SU1556A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
