5
7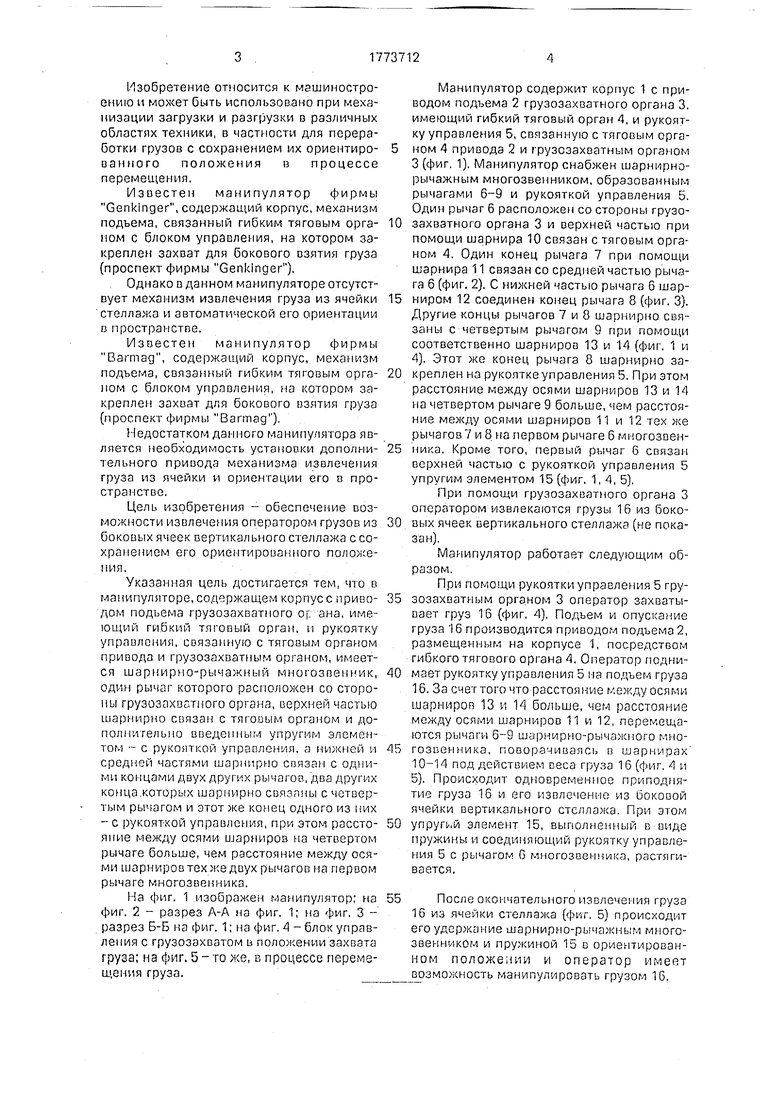
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Кран для гидротехнических затворов | 1988 |
|
SU1602851A1 |
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| Многоярусный стеллаж | 1982 |
|
SU1076375A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2585500C1 |
| Устройство для перегрузки штучных материалов, напр. бревен, с непрерывно действующего транспортера | 1929 |
|
SU35678A1 |
| Ловитель для грузоподъемных механизмов | 1986 |
|
SU1337333A1 |
| Накопительный конвейер штучных грузов | 1989 |
|
SU1676958A1 |
| Вертикальный транспортер | 1987 |
|
SU1507710A1 |
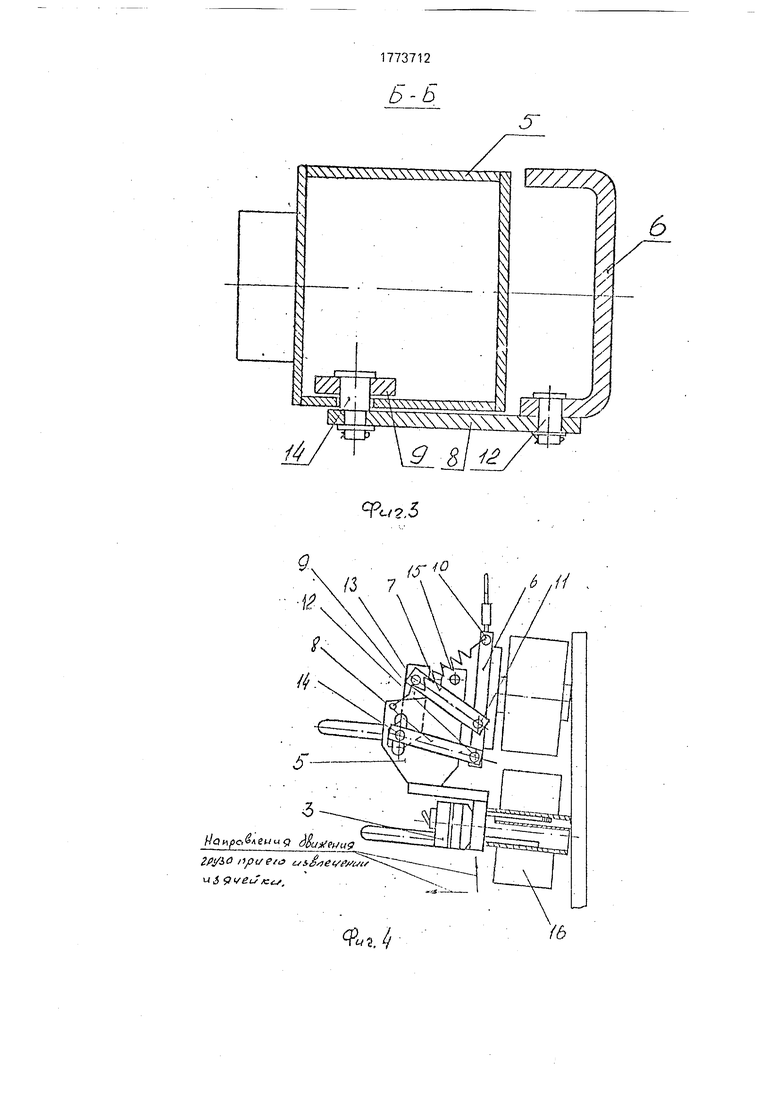
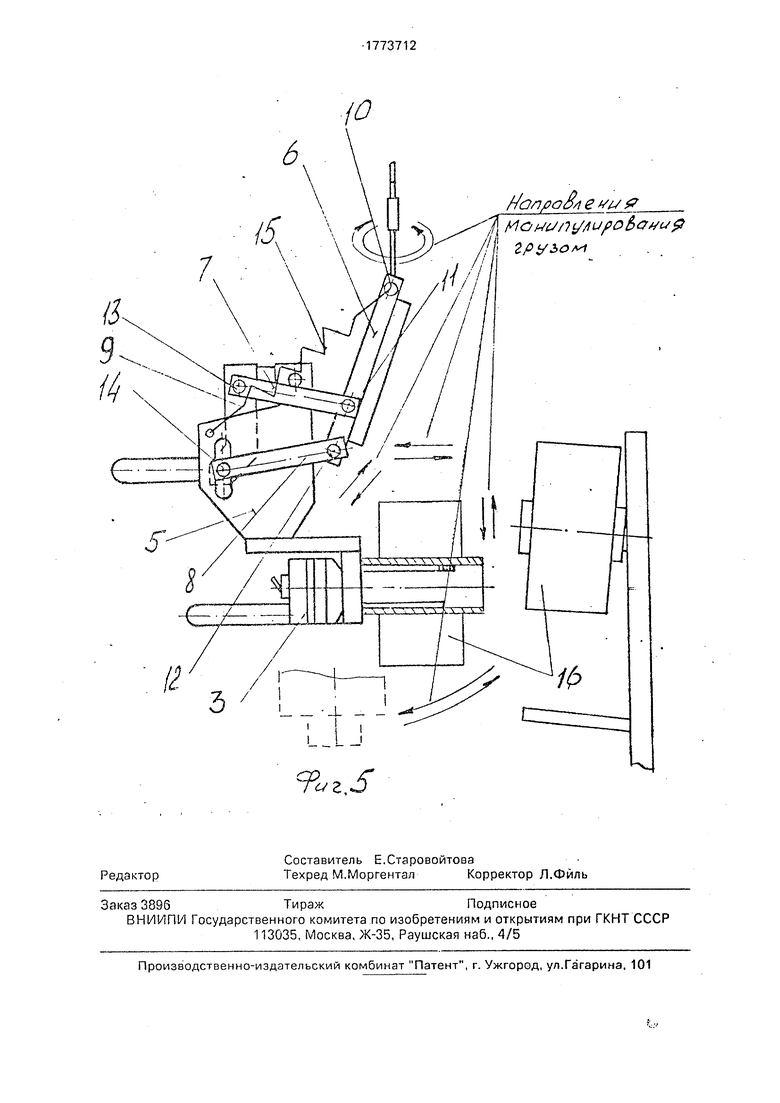
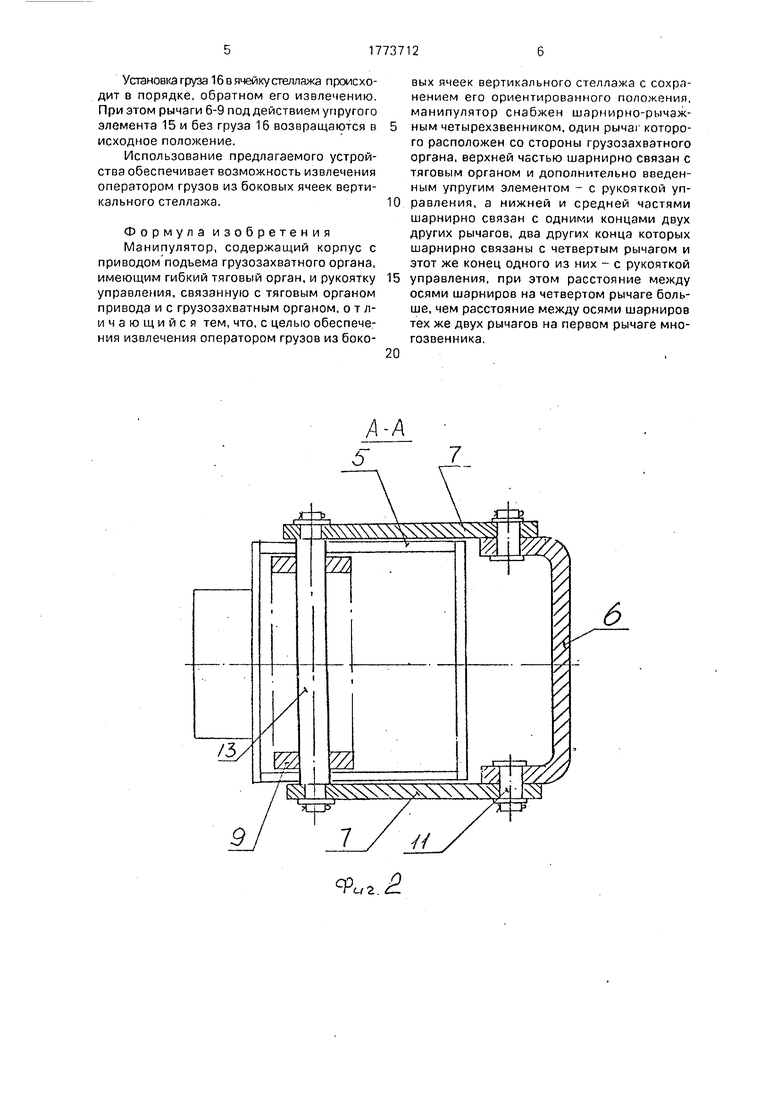
Использование: машиностроение, в частности при механизации загрузки и разгрузки изделий в различных областях техники. Привод подъема груза снабжен гибким тяговым органом, к которому прикреплен блок управления с грузозахватом. Соединение гибкого тягового органа с блоком управления осуществляется посредством рычажного механизма, содержащего поворотные в параллельной оси захвата вертикальной плоскости рычаги, образующие совместно с блоком управления шарнирный многозвенник, два шарнира которого размещены в верхней и нижней частях блока управления, а два других - на нижней части основного рычага, к верхней части которого присоединен гибкий тяговый орган. За счет того,что расстояние между шарнирами 11 и 12 меньше, чем расстояние между шарнирами 13 и 14, перемещаются рычаги 7, 8, 9 и 6 рычажного механизма 4, поворачиваясь в шарнирах 10-14. Под действием веса груза происходит одновременное его приподнятие и его вытягивание из ячейки стеллажа. При этом пружина 15, соединяющая блок управления 5 с основным рычагом 6 рычажного механизма 4, растягивается, а груз сохраняет свое ориентированное положение. 5 ил.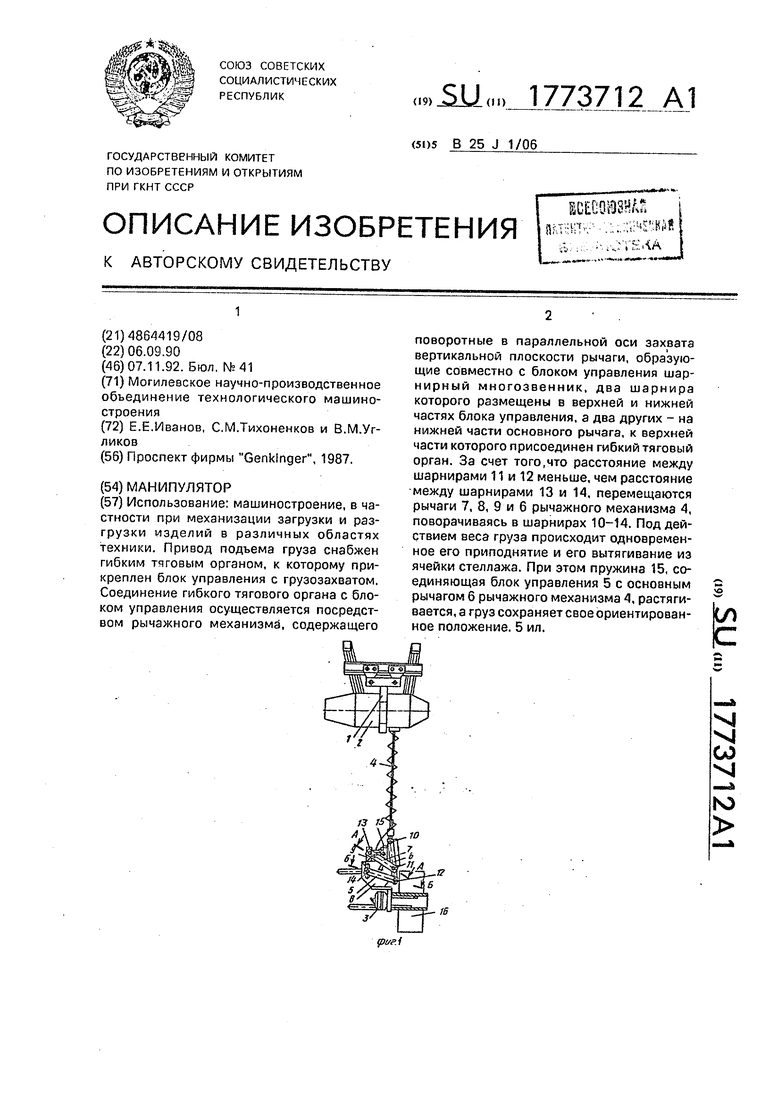
9
6
J-/ciHpc, ZPfoa npi/ete иьЈлее/мм A9 veJ /ct-r
г//
Б-Б
VZZZZfy
6
.5
г fO
6 ,14
6
в
li
ъ
Ъг.Ј
tfanpoЈ4eists&. % исим/лулироВам
груьом
| Проспект фирмы Genklnger, 1987. |
