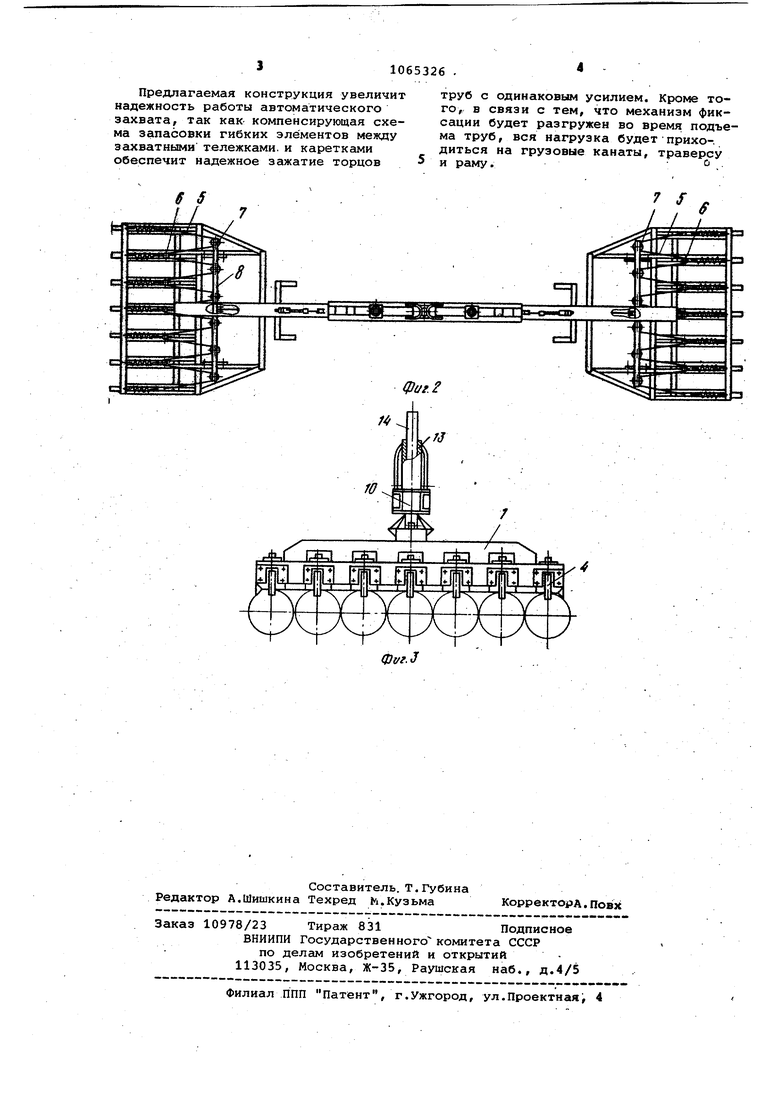
Изобретение относится к автоматическим навесным грузозахватным устройствам для подъема полых длинномер ных изделий, например труб, ПЕ ёдназначенных преимущественно для погрузки, разгрузки и штабелирования одновременно ряда труб различной длины и вдного диаметра. Известно захватное устройство для труб, сод гржащее раму с направляющими, в которых установлены с воз можностью возвратно-поступательного перемещения тележки с захватными крюками, соединенные со стягивающими пружинами и связанные с помощью тросо-блочной. системы с траверсой, ,на-, вешиваемой на крюк грузоподъемной ма шины, и механизм фиксации захватных крюков в раскрытом положении Cl J. Однако известные захваты недостаточно надежны, потому что усилие зажатия лапами торцов труб, создаваемое пружинами, не является постоянной величиной и колеблется 6 больших пределах в зависимости от длины труб. Кроме того, надежность работы захватов снижается из-за того, что при подъеме ряда труб весь груз висит на замкнутом фиксаторе механизма фиксации, который несет нагрузку как от веса труб, так и собственного веса балки захвата. Цель изобретения - повышение надежности. Данная цель достигается тем, что захватное устройство для труб, со(держащее раму с направляющими, в которых установлены с возможностью воз вратно-поступательного перемещения тележки с захватными крюками, соединенные со стягивающими пружинами и связанные с помощью тросо-блочной системы с траверсой, навешиваемой на крюк грузоподъемной машины, и механизм фиксации захватных крюков в раскрытом положении, снабжено установленными между тележками в направляющих с возможностью возвратно-по-ступательного перемещения поперечными балками, закрепленными на балка и тележках отклоняющими блоками, последовательно огибающими последние гибкими элементами, при этом стягивающие Пружины расположены между тор цами paNM и тележками, а свободный конец тросо-блочнрй системы прикреплен к балке. Такое выполнение захватного устройства повышает его надежность. На фиг.1 изображено захватное уст ройство, общий вид спереди; на фиг.2 - то же, общий вид сверху; на фиг.З - то же, вид сбоку. Захватное устройство содержит раму 1 коробчатого сечения, оба конца которой выполнены с направляющими 2, где перемещаются возвратно-поступательно тележки 3 с захватными крюками 4. Все тележки с одной стороны захвата с помощью гибких элементов 5 через отклоняющие .блоки 6 и 7, установленные на тележках 3 и на подвижной поперечной балке 8, связаны между собой по компенсирующей схеме, каждая поперечная балка 8 смонтирована на каретке 9. Тросо-блочная система выполнена в виде двух многократных полиспастов, расположенных симметрично по обе стороны механизма 10 фиксации. Каждый из запасованных канатов 11 связан одним концом с поперечной балкой 8, а другим концом - через блоки с траверсой 12 и рамой 1. Траверса 12 через проушины навешивается, на крюк грузоподъемной машины и имеет по обе стороны втулки 13, которыми балка насажена на направляющие стойки 14, установленные на раме. На траверсе установлен механизм 10 фиксации четырехтактного типа, взаимодействующий с рамой 1. Для возврата тележек 3 в исходное положение они через кронштейны связаны с рамой пружинами 15. Работа автоматического захвата заключается в следующем. В начальном положении траверса 12 связана с балкой механизмом 10 фиксации. Пружина 15 оттягивает тележки 3 с крюками 4, а также связанные с ними поперечные балки 8 к торцам рамы 1. В таком положении устройство висит на крюке грузоподъемной машины без трубы и готово к работе. При установке захватного устройства на ряд труб и приближении траверсы 12 к раме 1 происходит расцепка механизма 10 фиксации, и траверса получает возможность перемещаться по направляющим стойкам 14. При удалении от рамы траверса, соединенная .канатами 11 через блочную систему с балками 8, перемещает их к центру рамы. Тележки 3, связанные с поперечными балками гибкими элементами 5, начнут перемещаться до тех пор, . пока не зажмут трубы с двух сторон крюками.После этого прекращается удаление траверсы относительно рамы и начинается подъем и транспортировка труб. Когда трубы будут опущены на транспортное средство или в штабель, произойдет освобождение их от захвата. Траверса движется .по направляющим стойкам вниз, приближаясь к раме на сколько ей позволяет механизм фиксации, при этом происходит сцеп- ление траверсы 12 с рамоК 1 через механизм 10 фиксации. Канаты 11 ослабляются,- и пружины 15 оттягивают тележки 3, а с ними и поперечные балки 8 к торцам рамы. При дальнейшем подъеме крюки тележек остаются.в раскрытом состоянии, и захват освобождается от трубы.
Предлагаемая конструкция увеличит надежность работы автоматического захвата, так как компенсирующая схема запасовки гибких элементов между захватными тележками, и каретками обеспечит надежное зажатие торцов
труб с одинаковым усилием. Кроме того, в связи с тем, что механизм фиксации будет разгружен во время подъема труб, вся нагрузка будет прихо-. диться на грузовые канаты, траверсу и раму. ,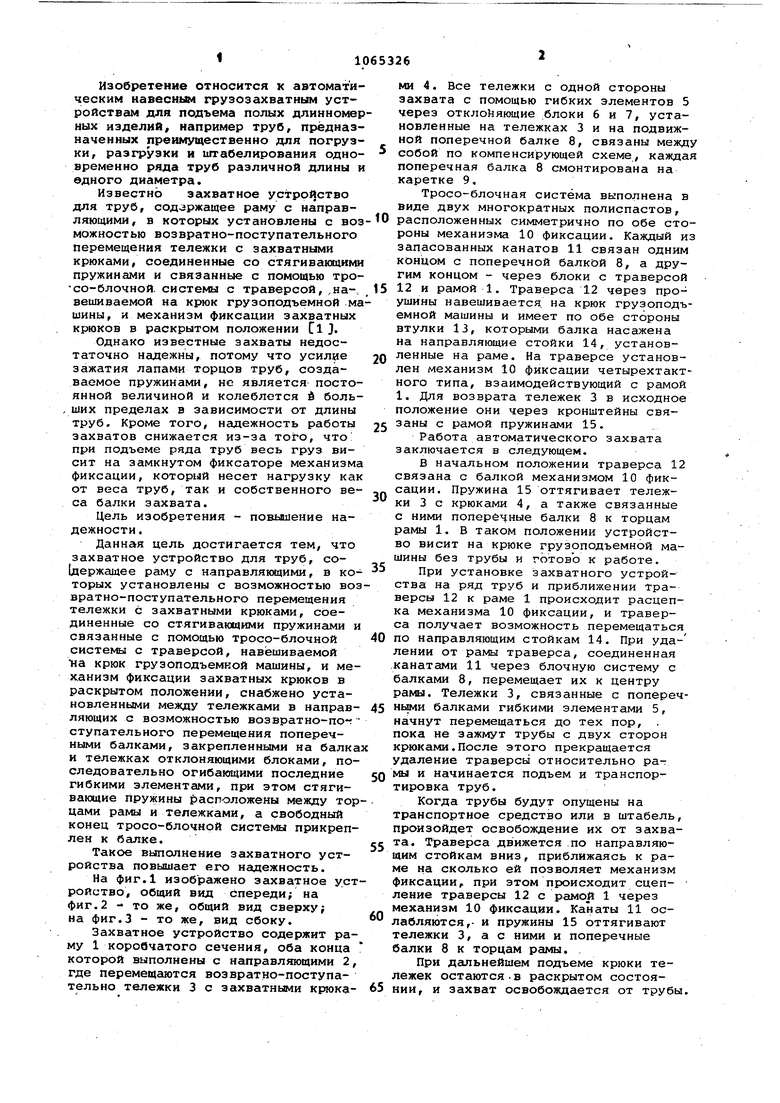
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для труб | 1982 |
|
SU1178680A1 |
| Грузозахватное устройство | 1975 |
|
SU1164195A1 |
| Устройство для подачи объектов на сооружение | 1979 |
|
SU856969A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Крановое автоматическое захватное устройство для перегрузки металлических труб | 1991 |
|
SU1787923A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| ТРАВЕРСА | 1991 |
|
RU2034769C1 |
| Автоматический клещевой захват | 1980 |
|
SU925838A1 |
| Захватное устройство для труб | 1989 |
|
SU1740302A1 |
| Захватное устройство для грузов | 1979 |
|
SU874572A1 |
ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ УРУТБ, содержащее раму с направляющи oi/ в которых установлены с возможностью возвратно-поступательного йеремездения тележки с захватными крюками, соединеиные со стягивающими пружинами и связанные с -помощью троч - - . . . - СО-блочной системы с траверсой, навешиваемой на крюк грузоподъемной машины, и механизм фиксации захватных крюков в раскрытом положении, от личающееся тем, что, с целью повышения надежности, оно снабжено установленными между тележками в направляющих с возможностью возвратно-поступательного перемещения поперечными балками, закрепленными на балках и тележках отклонякядими блоками, последовательно огибаьщими последние гибкими элементами, при этом стягивающие пружины расположены между торцами рамы и тележками, а свободный конец троса тросо-.влочной системы прикреплен к бцпке, §
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU183349A1 |
