Изобретение относится к электротехнике и может быть использовано в системах управления автоматическими (без водителя) напольными транспорт ными средствами. Целью изобретения является повышение надежности, На фиг.1 представлена схема пред лагаемой системы управления автоматического напольного электротранспорта; на фиг.2 - схема блока адрес вания переходов; на фиг.З - схема блока адресования остановок; на фиг.4 - схема блока контроля отказо коммутирующих транзисторов тягового электродвигателя. Система управления автоматического напольного электротранспорта содержит электродвигатель 1 постоян ного тока, блок 2 управления, импульсный преобразователь 3 напряжения, соединенные через выводы 4,5 и контакт 6 пускового контактора с источником питания - аккумуляторной батареей 7. Блок 8 формирования команд Пуск-останов выходом соеди нен с входом блока 2 управления тягового электродвигателя 1 и с входом блока 9 управления пусковым кон тактором, блок 10 адресования остановок входом соединен с элементом 1 считывания команд Остановка, блок 12 адресования переходов входами сое динен с элементами считывания 13 и 14 команд Прямой переход и 06ратньй переход. Формирователи сигналов 15 и 16 Сброс и Конец пути входами соединены соответственно с элементами 17 и 18 считывания команд Сброс и Конец пути. Другие выводы элементов считывания 11, 13, 14, 17 и 18 команд Остановка, Прямой переход, Обратный переход, Сброс и Конец пути соединены между собой и общей цепью источника питания 7. Автоматизированньй сервопривод 19 рулевого управления содержит серводвигатель 20, два датчика положения 21 и 22 транс портного средства относительно трас сы-ориентира и блок 23 управления. Блок 24 контроля отказов коммути|рующих транзисторов 25 входом-связан с базовыми цепями коммутирующих транзисторов 25. Система управления автоматическо го напольного электротранспорта содержит также два RS-триггера 26 и 022 27, два элемента И-НЕ 28 и 29, три элемента ИЛИ 30, 31 и 32, элемент И 33, переключатель 34 циклического и разового режимов обхода трассыориентира, кнопку 35 адресования транспортного средства в тупик.Выход формирователя сигнала 15 соединен с R-входами триггеров 26 и 27, S-вход триггера 26 соединен с выходом формирователя сигнала 16 Конец пути и первым входом элемента И-НЕ 28. а S-вход триггера 27 - с выводом кнопки 35 адресования транспортного средства в тупик. Один вход элемента И 33 соединен с прямым выходом триггера 26, первый вход элемента ИЛИ 30 соединен с выходом элемента И-НЕ 28, второй вход которого соединен с переключателем 34 циклического и разового режимов обхода трассы-ориентира. Вход элемента ИЛИ 31 соединен с выходом элемента И-НЕ 29 и вторыми входами элемента ИЛИ 30 и элемента И 33, второй вход элемента ИЛИ 31 соединен с выходом блока 10 адресования остановок. Первый вход элемента И-НЕ 29 соединен с инверсным выходом триггера 27, а второй вход элемента И-НЕ 29 соединен с выходом блока 24 контроля отказов. Выход элемента И 33 соединен с входом элемента ИЛИ 32, второй вход которого соединен с выходом блока 12 адресования переходов, а выход - с управляющим входом блока 23 управления сервопривода 19. Выход элемента ИЛИ 30 соединен с одним входом блока 8 формирования команд Пускостанов , второй вход которого соединен с вторым входом блока 2 управления тяговым электродвигателем 1 и с вЬкодом элемента ИЛИ 31. Блок 8 формирования крманд Пускостанов состоит из RS-триггера 36, элемента И 37 и одновибратора 38, причем S-вход триггера 36 соединен с первым входным выводом блока 8 формирования команд Пуск-останов, а R-вход триггера 36 соединен с цепью сигнала начального Пуска. Инверсный выход RS-триггера 36 соединен с одним входом элемента И 37, другой вход которого соединен с выходом одновибратора 38, вход одйовибратора 38 соединен с вторым входным выводом блока 8 формирования команд Пускостанов. Выход элемента И 37 соеди3
нен с выходным выводом блока 8 формрования команд Пуск-останов.
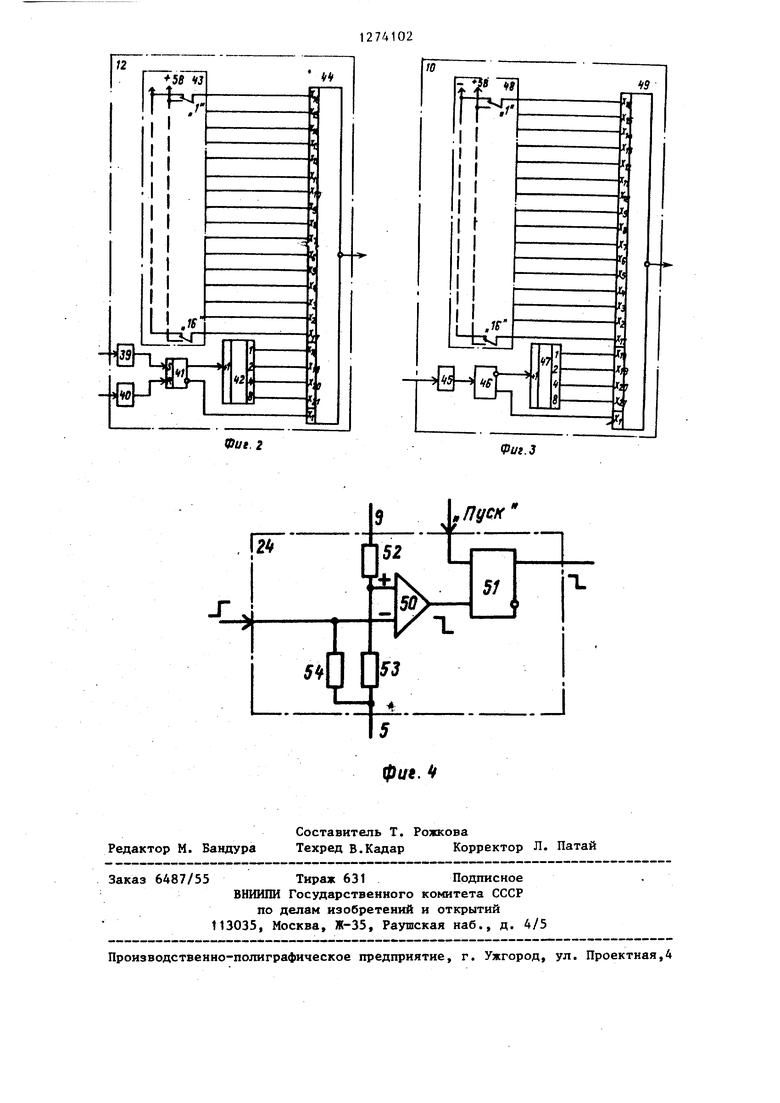
Блок 12 адресования переходов сотоит из двух формирователей сигнало 39 и 40, RS-триггера 41, устройства 42 счета переходов, устройства 43 контактного кодирования переходов и устройства 44 сравнения, выполненного на селекторе-мультиплексоре,причем вход первого формирователя 39 сигналов соединен с входным выводом блока 12 адресования переходов для подачи сигнала прямого перехода, а вход второго формирователя 40 сигналов соединен с другим входным выводом блока 12 адресования переходов для подачи сигнала обратного перехода. Выход формирователя 39 сигналов соединен с S-входом триггера 41, выход формирователя 40 сигналов соединен с R-входом триггера 41, прямой выход которого соединен с входом устройства 42 счета переходов, а инверсный - с входом устройства 44 сравнения. Другие входы устройства 44 сравнения соединены с выходами устройства 42 счета переходов и устройства 43 контактного кодирования переходов, выход устройства 44 сравнения соединен с выходным выводом блока 12 адресования переходов .
Блок 10 адресования остановок состоит из формирователя сигналов 45 делителя на два 46, устройства 47 счета остановок, устройства 48 контактного кодирования остановок,устройства 49 сравнения, выполненного на селекторе-мультиплексоре. Вход формирователя сигналов 45 соединен с входным выводом блока адресования остановок, выход формирователя сигналов 45 соединен с входом делителя на два 46, инверсный выход которого соединен с входом устройства 47 счета остановок, а прямой - с входом устройства 49 сравнения. Другие входы устройства 49 сравнения соединены с выходами устройства 47 счета остановок и устройства 48 контактного кодирования остановок. Выход устройства 49 сравнения соединен с дыходным выводом блока 10 адресования остановок.
Блок 24 контроля отказов коммутирунлцих транзисторов 25 состоит из схемы сравнения 50, триггера 51, резисторного делителя 52,53 и резисто024
ра 54, причем один из входов схемы сравнения 50 соединен с управляющим входом блока 24 контроля отказов коммутирующих транзисторов 25 и с одним выводом резистора 54, другой вывод резистора 54 соединен с общей цепью 5 источника питания 7.Второй вход схемы сравнения 50 соединен со средней точкой резисторного делителя напряжения 52, 53, крайние выводы резисторного делителя напряжения 52, 53 подключены к источнику питания 7, выход схемы сравнения 50 подсоединен к одному входу триггера 51,другой вход триггера 51 соединен с цепью сигнала начальный Пуск, а выход триггера 51 соединен с выходным выводом блока 24 контроля отказов коммутирующих транзисторов 25.
Импульсный преобразователь 3 напряжения содержит параллельно включенные коммутирующие транзисторы 25. В якорной цепи тягового электродвигателя 1 включен датчик тока 55 для осуществления обратной связи по току. В цепи обратной связи по скорости тягового электродвигателя 1 подключен тахогенератор 56.
Система работает следующим образом.
Перед выходом на трассу-ориентир в автоматическом режиме система управления кодируется по необходимым остановкам и переходам маршрута,например, с помощью тумблеров и кнопок в блоках адресования 10 и 12, которыми оператор задает требуемый мар- , шрут со всеми переходами и остановками.
Непосредственно перед выходом на аршрут система обнуляется от кодиованного ориентира Сброс через элемент считывания 17 Сброс формирователя сигнала сброса 15. Первоначальный пуск электротранспорта по трассе осуществляется подачей диспетчером-оператором, например, посредством кнопки на пульте сигнала Пуск на вход блока В формирования команд Пуск-останов.
Далее в процессе обхода маршрута еред казвдой остановкой и перекодом т соответствующих кодированных риентиров срабатывают элементы счиывания остановок 11 и переходов 13, 14. Сигналы от этих элементов ормируются, подсчитываются и сравниваются в устройстве сравнения информации (например селекторе-мультиплексоре) с заданными устройствами кодирования маршрута.
При совпадении очередного кодированного ориентира с номером требуемой остановки с выхода блока 10 адресования остановок через элемент ИЛИ 31 поступает управляющий сигнал (положительный перепад напряженин) на блок 8 формирования команд Пуск-останов и блок 2 управления тяговым электродвигателем 1, которые осуществляют перевод транспортного средства на малую скорость Непосредственно на требуемом месте остановки элемент .11 считывания остановок срабатывает от очередного кодирующего ориентира еще раз,и управляющий сигнал (отрицательный перепад напряжения) с выхода блока 10 приводит к остановке транспортного средства блоком 2 управления тяговым электродвигателем 1 и запуску одновибратора 38. По истечении заранее программируемого времени выстоя, требуемого на операции погрузки-выгрузки, транспортное средство трогается с места и следует далее по требуемому маршруту.
Аналогично происходит работа блока 12 адресования переходов. При совпадении очередного кодированного ориентира с номером требуемого пере хода сигнал с элемента 13 считывания прямого перехода формируется и подсчитывается счетчиком и после сравнения с выхода блока 12 адресования переходов через элемент ИЛИ 32 поступает управляющий сигнал (положительный перепад напряжения) на блок 23 управления серводвигателем, который переключает датчики положения 21 и 22 для перехода на трассуориентир, питаемую током другой частоты. При возврате на основную частоту срабатывает элемент 14 считывания обратного перехода и система возвращается на основную трассуориентир.
В рабочем режиме - при движении транспортного средства по марпфуту (после осуществления сброса элементом 17) - состояние элементов на фиг.1 следующее: логический О присутствует на выходах элементов 12, 16, 26, 33, 32, 10, 29 и 31, логическая 1 присутствует на выходах элементов 28, 30, 27, 24, 50 и 51.
Устройства 43 и 48 кодирования остановок и переходов построены на. тумблерах, расположенных на щитке управления транспортного средства, причем включенные тумблеры определяют порядковые номера остановок и переходов, которые должны отрабатываться при прохождении трассы. При этом через включенные тумблеры сигналы логической 1 поступают на соответствующие входы устройства 44 и 49 сравнения, построенных на микросхемах селектор-мультиплексор.
При этом на входах элемента И-НЕ 29 присутствуют сигналы логической 1 а на выходе - логического О,который разрешает прохождение сигналов остановок с блока 10 через элемент ИЛИ 31 на блок 8 и сигнала Конец пути с формирователя сигналов 16 и элемента И-НЕ 28 через элемент ИЛИ 30 на блок 8, а также запрещает прохождение этого сигнала с формирователя сигналов 16 и RSтриггера 26 через элемент И 33 на элемент ИЛИ 32 и блок 23 управления сервоприводом 19. Таким образом,периодические управляющие сигналы (положительной полярности), поступающие с выходов блоков 10 и 12 при прохождении транспортным средством кодированных ориентиров Остановки и Переходы проходят соответственно через элементы ИЛИ 31 и 32 на соответствующие блоки 2,8 и 23, формирующие следующие команды: при поступлении положительного перепада напряжения с выхода элемента ИЛИ 31 на вход блока 2- команду Малая скорость, воздействующую через импульсньй преобразователь 3 на тяговый электродвигатель 1, при поступлении отрицательного перепада напряжения с выхода элемента ИЛИ 31 на вход одновибратора 38 - команду Автоматическая остановка, воздействующую через элемент И 37 и блок управления пусковым контактором на контакт 6, обесточивающий двигатели 1 и 20 при поступлении сигнала логическая 1 с блока 12 через элемент ИЛИ 32 на блок 23 - команду Переход, воздействующую на 21, 22 и серводвигатель 20. ; При приходе на конец маршрута от соответствующего кодированного ориентира срабатывает элемент 18 считывания Конец пути и, сли переключатель 34 режимов обхода трассы находится в положении 1 раз, т.е. разомкнут, сигнал лошческой 1, поступающий с выхода формирователя сигналов 16, инвертируется, элементом И-НЕ 28 и проходит через элемент ИЛИ 30 на триггер 26, формирующий команду Стоп в конце пути,воздействующую через элемент И 37 на блок управления пусковым контактором и контакт 6. Если переключатель 34 находится в положении Циклы, т.е. замкнут, сигнал с формирователя сигналов 16 не проходит через элемент И-НЕ 28 и транспортное средство, не останавли ваясь, продолжает движение по заданному маршруту повторено. При отказе заданного делителем 52, 53 на неинвертирующем входе схе мы сравнения 50 числа коммутирующих транзисторов 25 напряжение на инвертирующем входе схемы сравнения 50 поступающее с импульсного преобразователя 3, превысит опорное напряжение и на входе схемы сравнения , 50 появляется сигнал Отказ логического О, опрокидываюпщй триггер 51 в состояние логического О. Сигнал Отказ с выхода блока 24 поступает на вход элемента И-НЕ 29, формирующего логическую 1, которая запрещает прохождение управляющих сигналов Остановки с блока 10 через элемент ИЛИ 31 и сигнала Конец пути с формирователя сигналов и элемента И-НЕ 28 через элемент ШШ 30, а также разрещает прохождение этого сигнала с формирователя сиг налов 16 и RS-триггера 26 (лог. 1) через элементы И 33 и ИЛИ 32 на блок 23 управления сервопривода 19, формирующий команду Переход для перехода транспортного средства в тупиковую ветвь трассы-ориентира за счет переключения датчиков 21, 22 и коррекции работы серводвигателя 20. С выхода .элемент 31 ШШ сигнал логической 1. подается на блок 2 управления тяговым электродвигателе формирующий команду Малая скорость воздействукяцую через импульсный пре образователь 3 напряжения иа тяговы электродвигатель 1. 028 Триггер 36 и одновибратор 38 в блоке 8 заблокированы элементами ИЛИ 30 и 31. Аналогично система срабатывает при нажатии кнопки 35 Тупик. Переключатель 34 циклического и разового режимов служит для циклического или одноразового прохождения транспортным средством заданного маршрута, и при принудительном выводе транспортного средства положение переключателя 34 не влияет на прохождение команды Отказ благодаря введенному элементу ИЛИ 30. Принудительный вывод транспортного средства с рабочего участка трассы-ориентира осуществляется автоматически при срабатывании блока 24 контроля отказов импульсного преобразователя 3 тягового электродвигателя 1 или по сигналу оператора при нажатии кнопки 35 Тупик. Так как принудительный вывод должен осуществляться с любого места рабочего участка трассы, то после формирова-, ния команды Отказ вывод осуществляется посредством системы управления, при этом участвуют в работе следующие блоки и элементы системы управления: блок 24 контроля отказов или кнопка 35 Тупик с RS-триггером 27, элемент И-НЕ 29, элемент считывания 18 Конец пути, формирователь сигналов 16, триггер 26,элементы И 33 и ИЛИ 32, блок управления 23 серводвигателем, датчики положения 21, 22, серводвигатель 20, а также элемент ИЛИ 31, блок управления 2 тягового электродвигателя 1, импульсный преобразователь 3 напряжения, тяговый электродвигатель 1 и аккумуляторная батарея 7. Элемент считывания 17 Сброс с формирователем сигнала сброса 15 предназначены для предварительной установки триггеров 26 и 27 в исходное состояние. Элементы ИЛИ 30 и 31 предназначены для блокировки сигналов Стоп в конце пути и автоматические остановки, поступающих на входы блока 8. Таким образом, при отказе коммутирующих транзисторов преобразователя, приводящем к снижению надежности системы (и возникновению опасности полной потери работоспособности тяговым электродвигателем), система обеспечивает автоматический принудительный вывод транспортного средства с 9 рабочего участка трассы-ориентира в тупик. Тем самым повьшается надежность системы за счет предотвращения дальнейшей эксплуатации транспортного средства с отказом в преобразователе тягового электродвигателя, которая может привести к полно му, выходу из строя преобразователя и транспортного средства в целом. Расширяются функциональные возможности транспортного средства за счет обеспечения возможности автоматического принудительного вывода транспортного средства в тупик по сигналу оператора нажатием кнопки Тупик на пульте управления. В случае использования транспортного автоматическрт го средства в составе автоматической транспортной системы (с несколькими транспортными средствами) в ряд случае предупреждается создание препятствия на трассе-ориентире для прохождения других транспортных средств, причем транспортное средство с отказом преобразователя автома тически адресуется и уходит в тупик приспособленньш для проведения ремонтно-восстановительных работ,что особенно целесообразно при эксплуатации автоматических систем, не тр бующих постоянного обслуживания. Формула изобретения 1. Система управления автоматического напольного электротранспорт содержащая электродвигатель постоян ного тока, блок управления, импульс ный преобразователь напряжения с параллельно включенными коммутирующими транзисторами, соединенные через контакт пускового контактора с выводами источника питания, блок формирования команд Пуск-останов, выходом соединенный с входом блока управления тягового электродвигателя и входом блока управления пусковым контактором, блок адресования остановок, входом соединенный с эле ментом считывания команд Остановка, блок адресования переходов, входами соединенный с элементами считывания команд Прямой переход Обратный переход, формирователи сигналов Сброс и Конец пути,вхо дами соединенные соответственно с элементами считывания команд Сброс и Конец пути, причем другие вьгоод 210 элементов считывания команд Остановка, Прямой переход, Обратный переход, Сброс и Конец пути соединены между собой и общей цепью источника питания, автоматизированный сервопривод рулевого управления с серводвигателем, с двумя датчиками положения транспортного средства относительно трассы-ориентира и блоком управления, а также блок контроля отказов коммутирующих транзисторов, входом связанный с базовыми цепями коммутирующих транзисторов, о т л ичающаяся тем, что, с целью повышения надежности, в нее дополнительно введены два RS-триггера, два элемента И-НЕ, три элемента ИЛИ,элемент И, переключатель циклического и разового режимов обхода трассыориентира, кнопка адресования транспортного средства в тупик, причем выход формирователя сигнала Сброс соединён с R-входами триггеров, S-вход первого триггера - с выходом формирователя сигнала Конец пути и первым входом первого элемента И-НЕ, а S-вход второго триггера с выводом кнопки адресования транспортного средства в тупик, один вход элемента И - с прямым выходом первого триггера, один вход, первого элемента ИЛИ - с выходом первого элемента И-НЕ, второй вход которого соединен с переключателем циклического и разового режимов обхода трассы-ориентира, один вход второго элемента ИЛИ соединен с выходом второго элемента И-НЕ и вторыми входами первого элемента ИЛИ и элемента И, другой вход второго элемента ИЛИ с выходом блока адресования остановок, один вход второго элемента И-НЕ - с инверсным выходом второго триггера, а другой вход второго элемента И-НЕ - с выходом блока контроля отказов, выход элемента И - с входом третьего элемента ИЛИ, другой вход которого соединен с выходом блока адресования переходов, а выход - с управляющим входом блока управления сервопривода, выход первого элемента ИЛИ соединен с одним входом блока формирования команд Пуск-останов, другой вход которого соединен с другим входом блока управления тяговь1м электродвигателем и выходом второго элемента ИЛИ. 2. Система по п.1, отличающая с я тем, что блок формирова11
ния команд Пуск-останов состоит из RS-триггера, элемента И rt одновибратора, причем S-вход триггера соединен с первым входным выводом блока формирования команд Пуск-останов, инверсный выход RS-триггерас одним входом элемента И, другой вход которого соединен с выходом одновибратора, вход одновибратора соединен с третьим входным выводом блока формирования команд Пуск - останов , а выход элемента И - с выходным вьгоодом блока формирования команд Пускостанов .
3. Система поп.1, отличающаяся тем, что блок адресования переходов состоит из двух формирователей сигналов, RS-триггера, устройства счета переходов, устройства контактного кодирования переходов и устройства сравнения, выполненного на селекторе-мультиплексоре, причем вход первого формирователя сигналов соединен с первым входным выводом блока адресования переходов, вход второго формирователя сигналов - с вторым входным выводом блока адресования переходов, выход первого формирователя сигналов соединен с S-входом триггера, вьпсод второго формирователя сигналов - с R-входом триггера, прямой выход которого соединен с входом устройства счета переходов а инверсный - с входом устройства сравнения, другие входы устройства сравнения соединены с выходами устройства счета переходов и контактного кодирования переходов, выход устройства сравнеия - с выходным вьшодом блока адресования переходов .
7А10212
4.Система поп.1, отличающая с я тем, что блок адресова,ния остановок состоит из формирователя сигналов, делителя на два, уст, ройства счета остановок, устройства контактного кодирования остановок, устройства сравнения, выполненного на селекторе-мультиплексоре, причем вход формирователя сигналов соединен
10 с входным выводом блока адресования остановок, выход формирователя сигналов - с входом делителя на два, инверсный выход которого соединен с входом устройства счета остановок,а
15 прямой - с входом устройства сравнения, другие входы которого соединены с выходами устройства счета остановок и контактного кодирования остановок, выход устройства сравнения
20 соединен с выходньм выводом блока адресования остановок.
5.Система поп.1,отличающ а я с я тем, что блок контроля отказов коммутирующих транзисторов
5 состоит из схемы сравнения, триггера, резисторного делителя и резистора, причем один вход схемы сравнения соединен с управляющим входом блока контроля отказов коммутирующих
0 транзисторов и с одним выводом резистора, другой вывод которого сое динен с общей цепью источника питания, другой вход схемы сравнения соединен с средней точкой делителя
J напряжения, крайние выводы делителя напряжения подключены к источнику питания, вьшод схемы сравнения подсоединен к одному входу триггера, выход которого соединен с выходным
0 вьшодом блока контроля отказов коммутирующих транзисторов, а другой вход триггера - с цепью сигнала начальный Пуск.
ф(/в. 7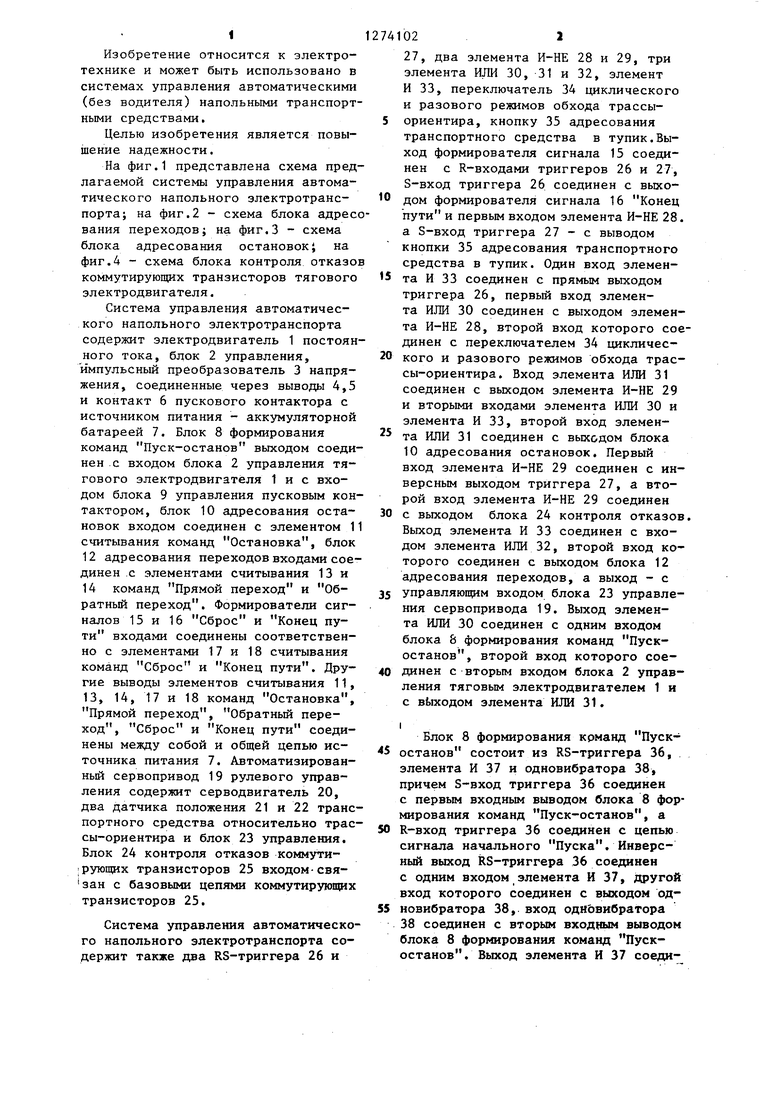


| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления транспортным средством по трассе-ориентиру | 1988 |
|
SU1543524A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для автоматического управления движением траспортного средства | 1977 |
|
SU690450A1 |
| Электропривод автоматического напольного электротранспорта | 1983 |
|
SU1116513A2 |
| Устройство для адресования транспортного средства с электроприводом | 1987 |
|
SU1431988A2 |
| Тяговый электропривод | 1983 |
|
SU1091294A1 |
| Устройство для адресования транспортного средства с электроприводом | 1983 |
|
SU1184767A1 |
Изобретение относится к электротехнике и может быть использовано в системах управления автоматическими (без водителя) напольными транспортньми средствами. Повьшение надежности системы обеспечивается принудительным выводом транспортного средства с рабочего участка трассыориентира в тупик при отказах транзисторов преобразователя тягового электропривода. Принудительный вывод транспортного средства осуществляется автоматически при срабатывании схемы контроля отказов транзисторов преобразователя или по сигналу оператора при нажатии кнопки Тупик. Принудительный вывод осуществляется с любого места рабочего участка трассы после формирования команды Отказ посредством системы управления. В случае использования нескольких (Л транспортных средств предупреждается создание препятствия на трассеориентире для неповрезеденных транспортных средств. 4 з.п. ф-лы. 4 ил.

| Патент США № 3512601, кл | |||
| Переносный кухонный очаг | 1919 |
|
SU180A1 |
| Электропривод автоматического напольного электротранспорта | 1982 |
|
SU1032579A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
