05ъе/(т дриентац1 и
Т
05 4
ОС
сх
4
фuг.f Изобретение относится к сельскому хозяйству, в частности к автоматическому управлению направленным движением машин, и может найти применение при создании вождения мобильных объектов. Известно устройство автоматического управления движением транспортного средства, содержащее генератор переменного тока, ориентирующие токонесущие провода с однонаправленными токами, чувствительный элемент, схему сравнения, источник эталонного напряжения 1. Известно также устройство для ориентации транспортных средств в электромагнитном поле токонесущего провода, уложенного в виде замкнутой рамки по краям трассы, содержащее два индукционных датчика, связанных со входами схемы сравнения и исполнительные органы 2. Недостатком известных устройств является отсутствие контроля положения транспортного средства на заключительных участках трассы относительно ее конца. Цель изобретения - осуществление контроля положения транспортного средства на заключительном участке трассы, относительно ее конца. Поставленная цель достигается тем, что устройство снабжено сумматором, второй схемой сравнения, источником опорного напряжения и схемой индикации, при этом входы сумматора соединены с выходами индукционных датчиков, а его выход - с первым входом второй схемы сравнения, второй вход которой связан с выходом источника опорного напряжения, а выход - с входом схемы индикации. На фиг. 1 дана блок-схема устройства; на фиг. 2 - эпюра распределения напряженности поля Н вдоль ориентирующей линии С. Устройство содержит индукционные датчики 1 и 2, первую схему сравнения 3, регулятор 4, исполнительные органы 5, сумматор 6, вторую схему сравнения 7, схему индикации 8 и источник опорного напряжения 9. Устройство работает следующим образом. При движении по трассе индукционные датчики 1,2, установленные симметрично относительно продольной оси транспортного средства, измеряют напряженности 84 поля и преобразуют их в соответствующие напряжения. Выходы датчиков подключены ко входам первой схемы сравнения 3 и сумматора 6. Выход схемы сравнения 3, на котором формируется сигнал, пропорциональный величине отклонения от заданной трассы, знак которого указывает направление смещения, подключен через регулятор 4 к исполнительным органам 5, посредством которых транспортное средство возвращается на заданную трассу. Одновременно сигнал, пропорциональный сумме абсолютных значений напряженности поля, с выхода сумматора 6 поступает на первый вход второй схемы сравнения 7, а ее второй вход связан с источником опорного напряжения 9. При нахождении транспортного средства на участке трассы АВ (фиг. 2) сигнал на выходе сумматора практически остается постоянным и не зависит от его смещения в сторону от трассы. Это обеспечивается тем, что датчики находятся на фиксированном расстоянии друг от друга симметрично продольной оси транспортного средства и поэтому при смещении в сторону от трассы увеличение сигнала одного датчика вызывает такое же уменьшение с другого датчика, но сумма остается постоянной. При дальнейщем движении транспортное средство попадает на заключительный участок трассы, например участок трассы, например участок ОА (фиг. 2), и напряжение на выходе сумматора 6 начинает возрастать. Оно поступает на первый вход схемы сравнения 7, на второй вход которой подключен источник опорного напряжения 9. Разностный сигнал с выхода схемы сравнения 7 поступает на вход схемы индикации 8, по показаниям которой судят о расстоянии до конца ориентирующей линии. Величина опорного напряжения устанавливается в соответствии с расчетными значениями напряженности поля для требуемых контролируемых расстояний в соответствии с данными размерами ориентирующей линии. Изобретение позволяет осуществить контроль положения транспортного средства относительно конца трассы и может быть использовано для изменения скорости движения и остановки в заданных точках на заключительных участках.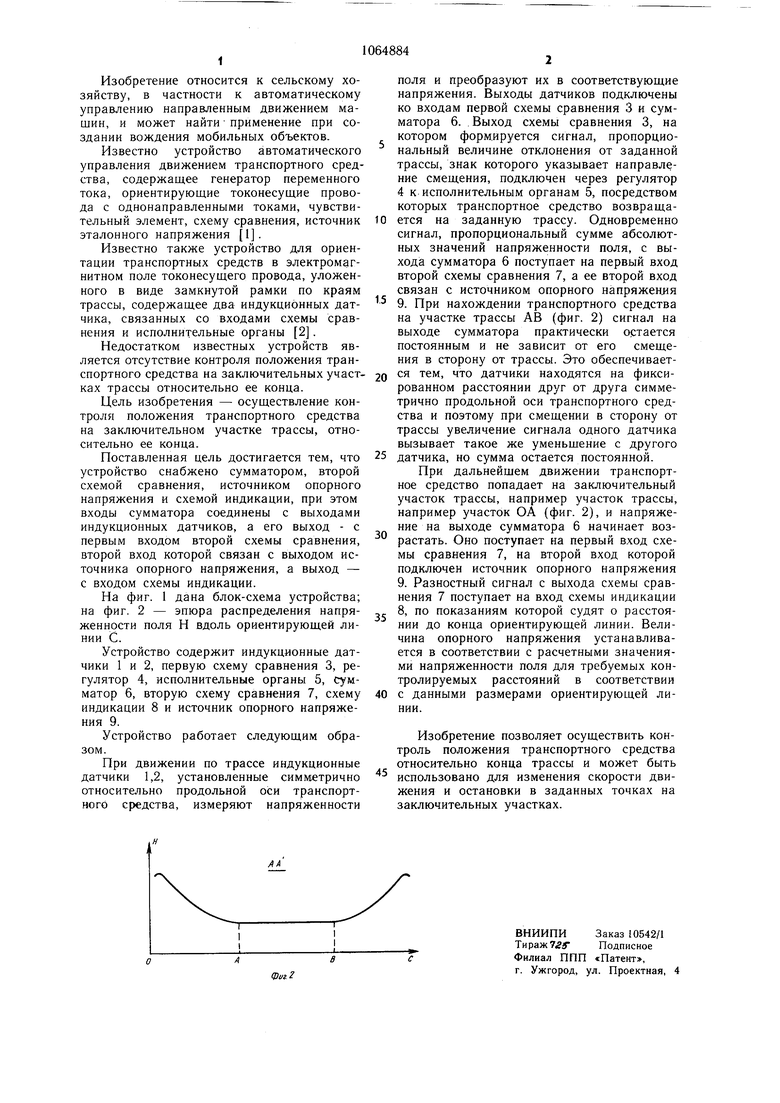
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника | 1990 |
|
SU1777682A1 |
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника | 1990 |
|
SU1796087A1 |
| Способ ориентации самоходной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1285148A1 |
| Устройство контроля параллельности проходимых траекторий | 1984 |
|
SU1190031A1 |
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для автоматического управления движением самоходного средства | 1981 |
|
SU976875A1 |
| Устройство для управления транспортными средствами | 1977 |
|
SU682937A1 |
УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ В ЭЛЕКТРОМАГНИТНОМ ПОЛЕ TOKOHEv СУЩЕГО ПРОВОДА, уложенного в виде замкнутой рамки по краям трассы, содержащее два индукционных датчика, связанных с входами схемы сравнения, и исполнительные органы, отличающееся тем, что с целью обеспечения контроля положения транспортного средства на заключительном участке трассы относительно ее конца, устройство снабжено сумматором, второй схемой сравнения, источником опорного напряжения и схемой индикации, при этом входы сумматора соединены с выходами индукционных датчиков, а его выход - с первым входом второй схемы сравнения, второй вход которой связан с выходом источника опорного напряжения, а выход - с входом схемы индикации.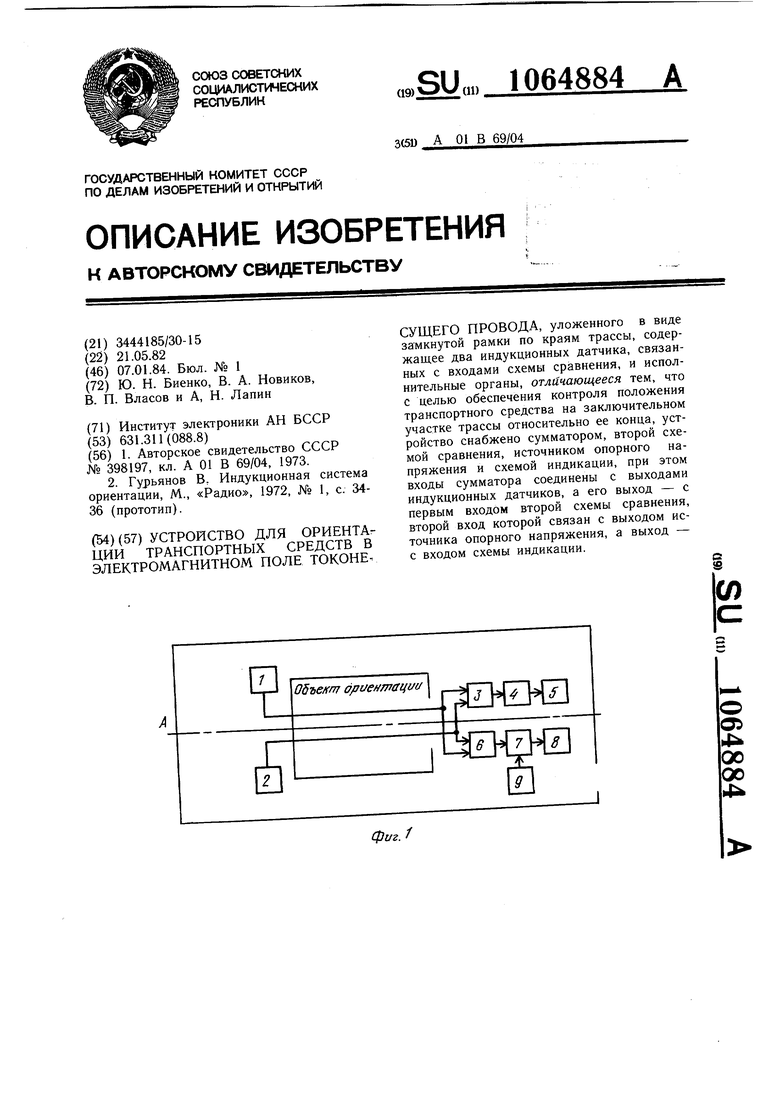
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ОРИЕНТАЦИИ САМОХОДНЫХ МАШИН В ИНДУКЦИОННОМ ПОЛЕ ТОКОНЕСУЩЕГО ПРОВОДLlifl;| '?M?^^^^3T^|j ;f"-h,4 O.JL--IX.S иШ | 0 |
|
SU398197A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гурьянов В, Индукционная система ориентации, М., «Радио, 1972, № 1, с | |||
| ЗАТВОР ДЛЯ ЛЮКА ТОВАРНОГО ВАГОНА | 1925 |
|
SU3436A1 |
