Изобретение относится к строительной индустрии и может найти применение, например, при немедленной распалубки изде- лий из бетонных смесей или после твердения изделий, формуемых с применением съемной бортоснастки,
Известно устройство для распалубки строительных изделий, содержащее съемную бортоснастку и привод ее подъема в виде силовых цилиндров с распределителями, смонтированные на основании по числу цилиндров командоаппараты, имеющие контакты и выходные валики, передаточные устройства, связывающие командоаппарат со сьемной бортоснасткой. Передаточное устройство выполнено в виде гибкой связи, закрепленной на барабане, связанном с возвратной пружиной и установленном на выходном валике командоаппарата, причем контакты командоаппаратов закоммутиро- ваны последовательно для возможности многоступенчатого перемещения бортоснастки.
Недостатками известного устройства являются:
1)перекосы бортоснастки при ее снятии с изделия вследствие наличия внутренних утечек рабочей жидкости (или воздуха) в распределителях, при этом эти утечки приводят также к сбою синхронной работы командоаппаратов;
2)снижение качества распалубливае- мых изделий, вследствие их механического повреждения при перекосах снимаемой рамки;
3)повышенная продолжительность снятия бортоснастки за счет того, что при каждой распалубке шаговое (многоступенчатое) перемещение (подъем) бортоснастки происходит с исходного положения силовых цилиндров, а не с момента касания толкателей на штоках с бортоснасткой;
4)повышенная продолжительность переналадки и низкая функциональная возможность существующих командоаппаратов при необходимости распалубки изделий других типоразмеров и конфигурации.
Для снятия бортоснастки штоки силовых цилиндров движутся к бортоснастке, от- рабатывая очередной шаг. Один из
СЛ
С
ч
00
о
4 СЛ
цилиндров проходит заданный шаг раньше других и должен остановиться по команде своего командоаппарата, но после получения этой команды фактически остановки не происходит из-за наличия внутренней утеч- ки рабочей жидкости (или воздуха) в распределителе. Внутренние утечки способствуют прохождению задаваемого командоаппара- том положения бортоснастки, что приводит к сбою работы устройства в целом. Вызыва- емые перекосы могут способствовать появлению остаточных деформаций (вне зоны упругих деформаций) материала, из которого выполнена бортоснастка, что приводит ее к отказу или выходу из строя.
Кроме того, применение командоаппа- ратов ограничивает число шагов, требуемых длл снятия бортоснастки, так как командо- аппараты по своим характеристикам обеспечивают их настройку на заданное характеристикой число шагов и величину шага. Это требует перерывов в работе для настройки требуемого числа шагов при изготовлении на одной и той же линии разных марок железобетонных изделий.
Целью изобретения является повышение производительности распалубки изделий.
Указанная цель достигается тем, что устройство для распалубки строительных из- делий, содержащее толкатели, взаимодействующие с бортоснзсткой и имеющие приводы шагового перемещения, выполненные в виде силовых цилиндров с гидрораспределителями, датчики исходно- го и конечного положений толкателей, датчики перемещения толкателей и пусковые элементы, снабжено датчиками касания толкателей с бортоснасткой, задатчиками величины и числа шагов перемещения тол- кателей, блоком счета числа шагов перемещения, блоками определения величины перемещения и усиления по числу толкателей и блоком управления, причем датчики перемещения толкателей подключены к первым входам соответствующих блоков определения величины перемещения, пусковые элементы подключены к первому, второму и третьему входам блока управления, к четвертым, пятым и шестым входам которого подключены соответственно датчики касания толкателей с бортоснасткой, исходного и конечного положений толкателей, выходы задатчика числа шагов перемещения подключены к первым входам блока счета числа шагов перемещения, выход которого подключен к седьмому входу блока управления и к вторым входам блоков определения величины перемещения, к третьим входам которых подключены первые выходы блока управления, второй выход которого подключен к четвертым входам блоков определения величины перемещения и к второму входу блока счета числа шагов, третий и четвертый входы которого подключены к третьему и четвертому выходам блока управления, пятый выход которого подключен к пятым входам блоков определения ве- личины перемещения, шестые входы которых соединены с выходами задатчика, величины шага перемещения, первые выходы блоков определения величины перемещения подключены к первым входам блоков усиления, вторые выходы - к восьмым входам блока управления, шестые и седьмые выходы которого подключены к вторым и третьим входам соответствующих блоков усиления, выходы которых подключены к соответствующим входам приводов толкателей.
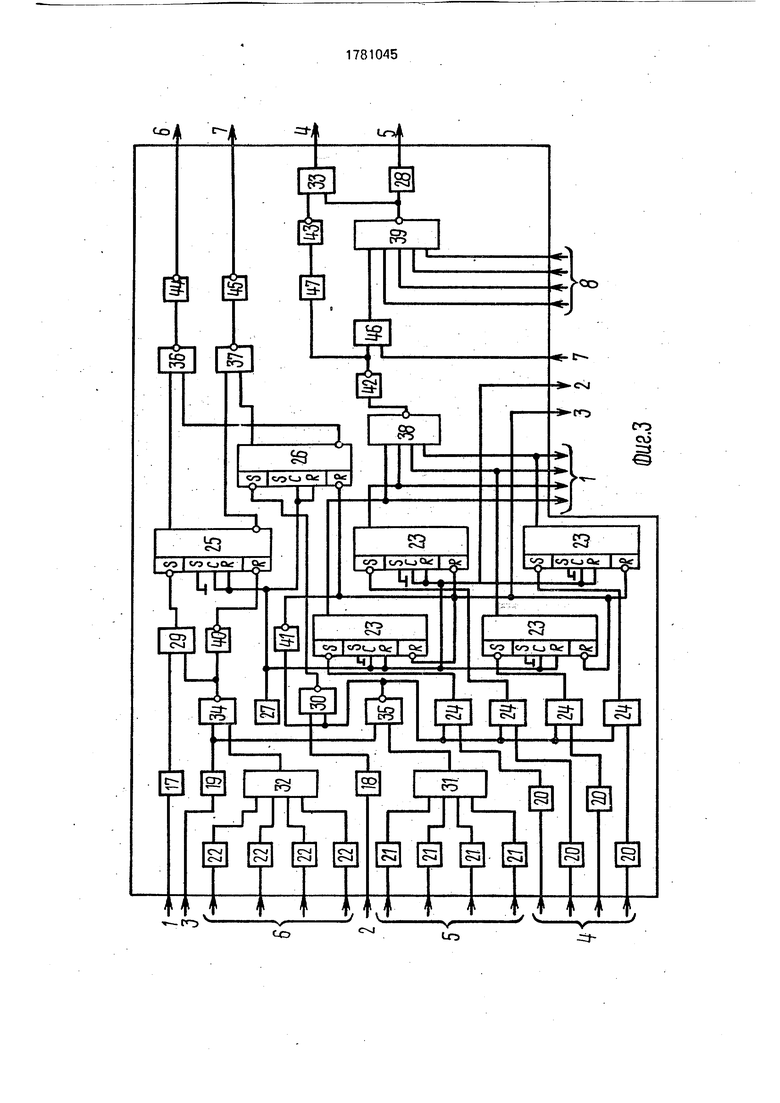
Блок управления выполнен в виде формирователей по числу пусковых элементов, датчиков касания толкателей с бортоснасткой, исходного и конечного положений толкателя, триггеров и элементов ИЛИ по числу датчиков касания, двух дополнительных триггеров и формирователей, пяти дополнительных элементов ИЛИ, шести элементов И-НЕ и НЕ, элемента И и элемента задержки, причем первым, вторым, третьим, четвертыми, пятыми и шестыми входами блока управления являются входы соответствующих формирователей, выход первого формирователя подключен к первому входу первого дополнительного элемента ИЛИ, выход которого подключен к инверсному S- входу первого дополнительного триггера, выход второго формирователя подключен к первому входу второго дополнительного элеве.нта ИЛИ, выход которого подключен к инверсному S-входу второго дополнительного триггера, выход третьего формирователя подключен к первому входу первого и второго элементов И-НЕ, выходы четвертых- формирователей по числу датчиков касания подключены к первым входам соответствующих элементов ИЛИ, выходы которых подключены к инверсным S-входам соответствующих триггеров, выходы пятых формирователей по числу датчиков исходного положения толкателей подключены к входам третьего дополнительного элемента ИЛИ, выход которого подключен к второму входу второго элемента И-НЕ, выходы шестых формирователей по числу датчиков конечного положения толкателей подключены к входам четвертого дополнительного элемента ИЛИ, выход которого подключен к второму входу первого элемента И-НЕ, вы- ход которого подключен v второму входу
первого дополнительного элемента ИЛИ и через первый элемент НЕ к инверсному R- входу первого дополнительного триггера, выход второго элемента И-НЕ подключен к вторым входам элементов ИЛИ по числу датчиков касания, второму входу второго дополнительного элемента ИЛИ и к входу второго элемента НЕ, прямые выходы дополнительных триггеров подключены соответственно к первым входам третьего и четвертого элементов И-НЕ, к вторым входам которых подключены инверсные выходы соответствующих триггеров, прямые выходы триггеров по числу датчиков касания являются первыми выходами блока управления, и подключены к входам пятого элемента И-НЕ, выход которого через третий элемент НЕ подключен к входу элемента задержки и к одному из входов элемента И, другой вход которого является седьмым входом блока управления, выход первого дополнительного формирователя подключен к С и прямым R-входам всех триггеров и является вторым выходом блока управления, выход второго элемента НЕ подключен к инверсным R-входам триггеров по числу датчиков касания и второго дополнительного триггера и является третьим выходом блока управления, четвертым выходом которого является выход пятого дополнительного элемента ИЛИ, первый вход которого через четвертый элемент НЕ соединен с выходом элемента задержки, выход элемента И подключен к одному из входов шестого элемента И-НЕ, другие входы которого являются восьмыми входами блока управления, выход шестого элемента И-НЕ подключен к второму входу пятого дополнительного элемента ИЛИ и к входу второго дополнительного формирователя, выход которого является пятым выходом блока управления, шестым и седьмым выходами которого являются выходы пятого и шестого элементов НЕ, входы которых соответственно соединены с выходом третьего и четвертого элементов И-НЕ, прямые S-входы триггеров соединены с общим проводом.
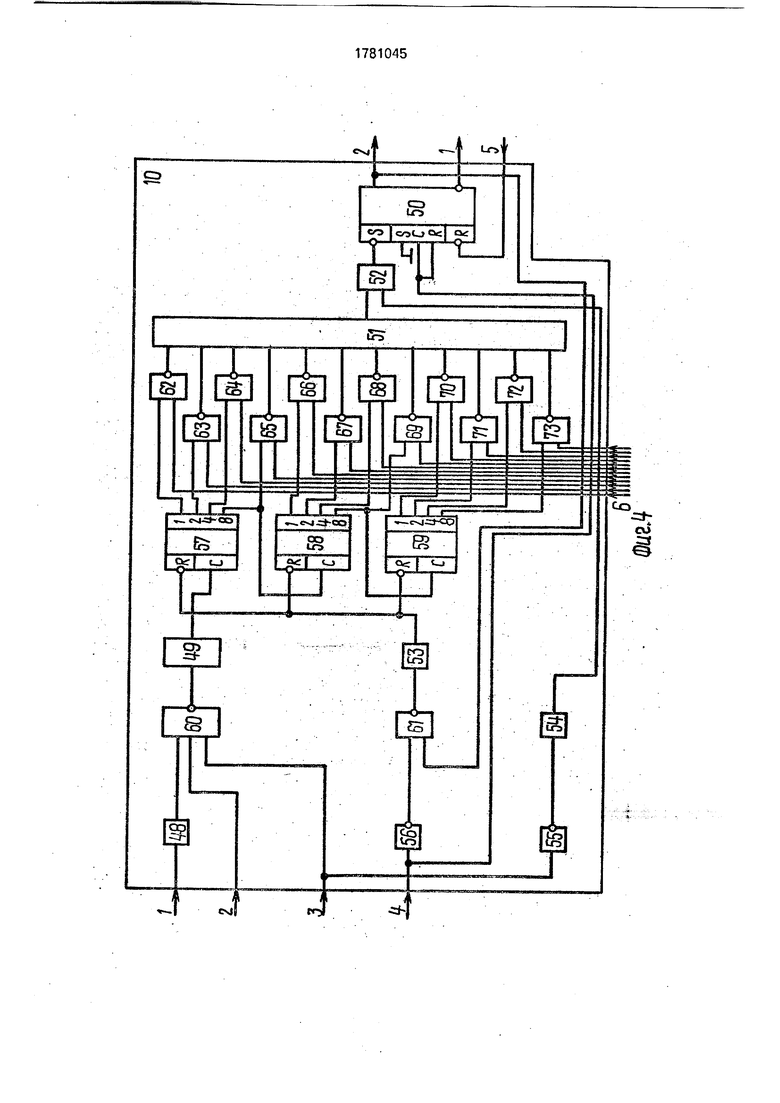
Блоки определения величины перемещения выполнены в виде элемента гальванической развязки, схемы пересчета, триггера, элементов ИЛИ и И, двух формирователей, элементов НЕ, трех счетчиков и четырнадцати элементов И-НЕ, причем первым входом блоков определения величины перемещения является вход элемента гальванической развязки, выход которого подключен к первому входу первого элемента И-НЕ, второй вход которого является вторым входом блоков определения величины перемещения, третьим входом которых является вход первого элемента НЕ и третий вход первого элемента И-НЕ, выход которого через схему пересчета подключен к счетному входу первого счетчика, счетный вход
второго счетчика подключен к старшему выходу первого, а счетный вход третьего счетчика к старшему выходу второго, четвертым входом блоков определения величины перемещения является вход второго элемента
НЕ, С- и прямой R-входы триггера, инверсный R-вход которого является пятым входом блоков определения величины перемещения, выход второго элемента НЕ подключен к первому входу второго элемента И-НЕ,
выход которого через первый формирователь подключен к входам сброса счетчиков, выходы которых подключены к первым входам остальных элементов И-НЕ, вторые входы которых являются шестыми входами
блоков определения величины перемещения, а выходы подключены к входам элемента ИЛИ, выход которого соединен с первым входом элемента И, второй вход которого соединен через второй формирователь с выходом первого элемента НЕ, выход элемента И подключен к инверсному S-входу триггера, инверсный выход которого является первым выходом блоков определения величины перемещения, прямой выход
триггера подключен к второму входу второго элемента И-НЕ и является вторым выходом блоков определения величины перемещения.
Блок счета числа шагов перемещения выполнен в виде двух счетчиков, формирователя, триггера, элемента ИЛИ и элементов И-НЕ по числу шагов перемещений, причем первыми входами блока счета числа
шагов перемещения являются первые входы элементов И-НЕ, вторым входом блока счета числа шагов перемещения являются С и прямой R-входы триггера, третьим входом блока счета шагов перемещения является
вход формирователя, выход которого подключен к инверсному R-входу триггера и установочным входам первого и второго счетчиков, четвертым входом блока счета числа шагов перемещения является счетный вход первого счетчика, один из выходов которого подключен к второму входу одного из элементов И-НЕ и к счетному входу второго счетчика, выходы которого и другие выходы первого счетчика подключены к вторым входам остальных элементов И-НЕ, выходы которых подключены к входам элемента ИЛИ, выход которого подключен к инверсному S-входу триггера, инверсный выход которого является вьисдом блока счета иис к. Lu ur03 перемещения.
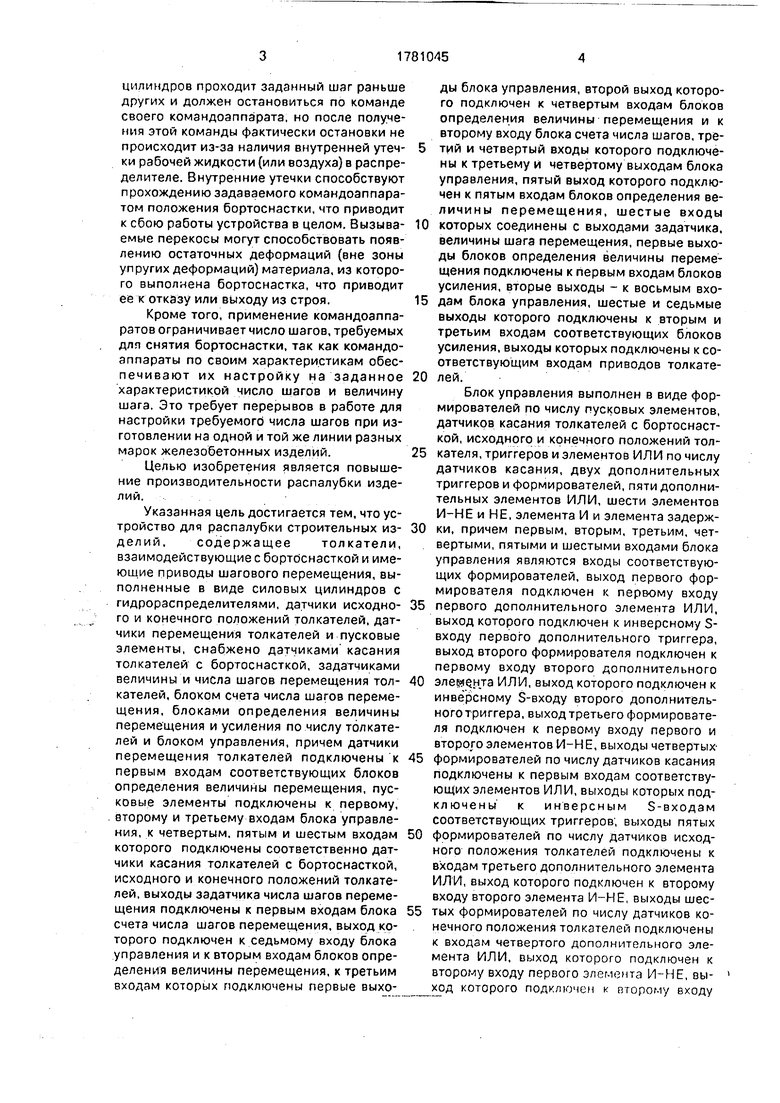
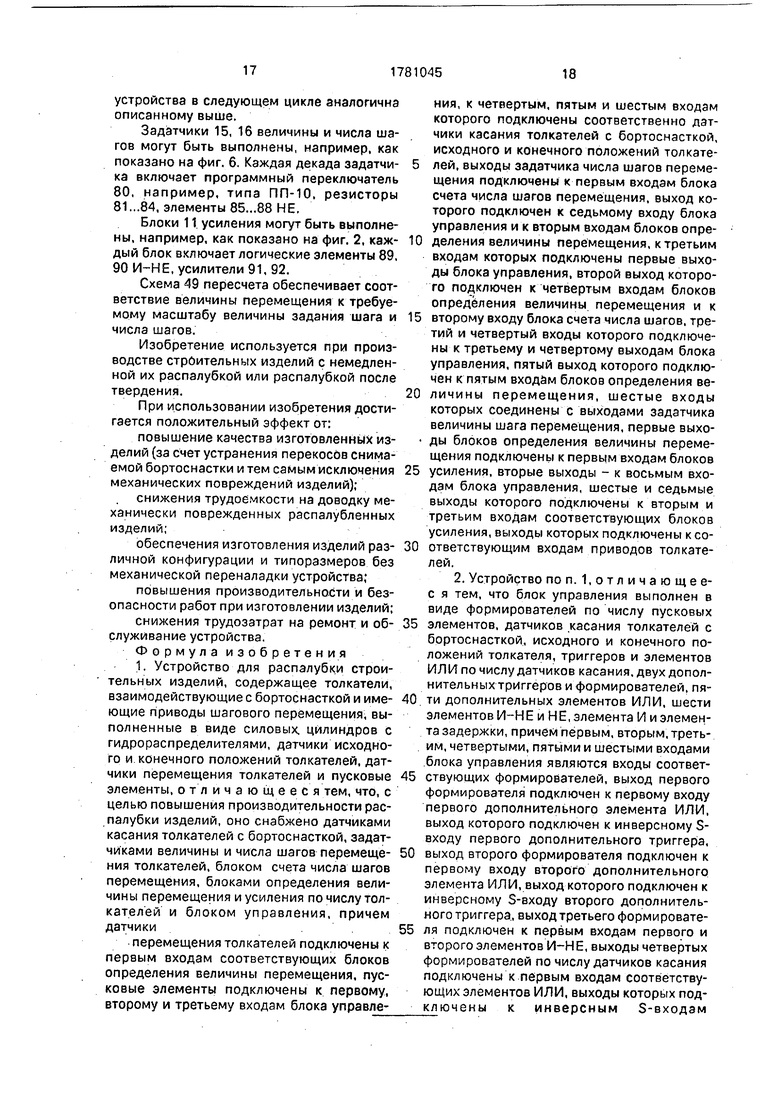
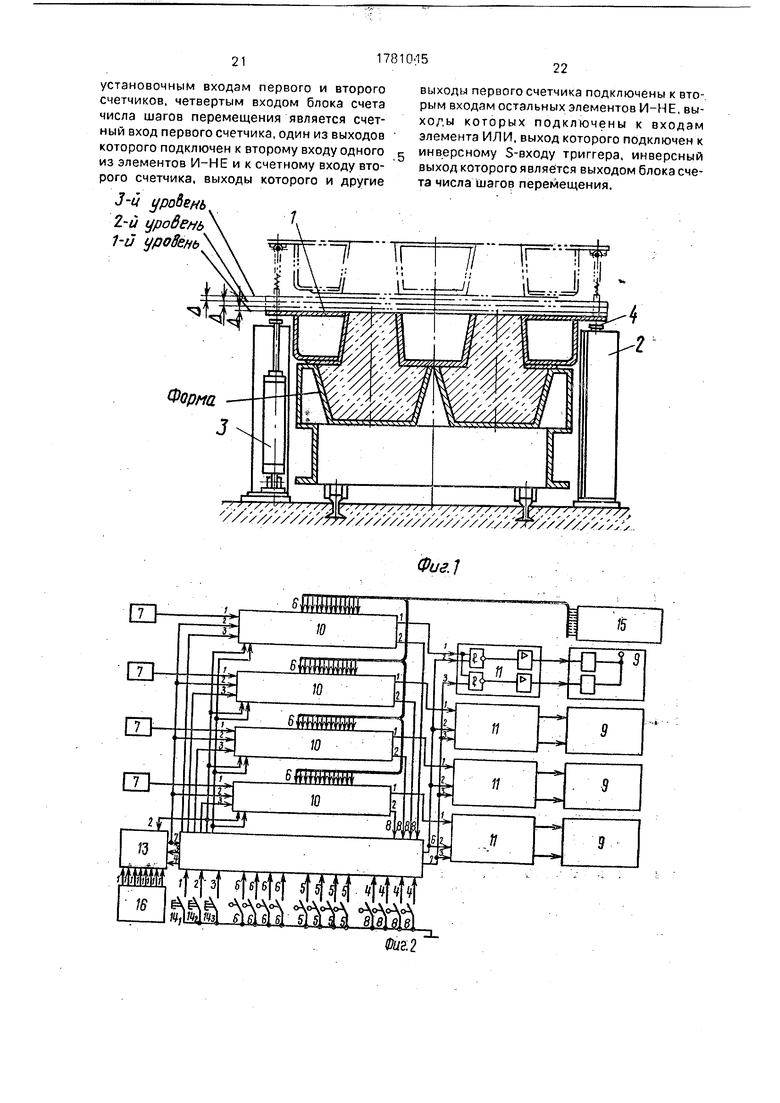
На фиг. 1 показано устройство для распалубки строительных изделий; на фиг. 2 - функциональная схема управления устройством; на фиг. 3 - функциональная схема блока управления; на фиг. 4 - функциональная схема блока определения величины перемещения; на фиг. 5 - функциональная схема блока счета числа шагов перемещения; на фиг. 6 - функциональная схема за- датчика величины или числа шагов перемещения толкателей.
Устройство для распалубки строительных изделий (фиг, 1. 2) включает съемную бортоснастку 1, приводы 2 шагового перемещения в виде силовых цилиндров 3 с толкателями 4. датчики 5 исходного положения, датчики 6 конечного положения, датчики 7 перемещения, датчики 8 касаний, командно-распределительную аппаратуру в виде гидрораспределителей 9, блоки 10 определения величины перемещения, блоки 11 усиления по числу толкателей 4, блок 12 управления, блок 13 счета числа шагов, пусковые элементы 14i, 142, 14здля формирования команд Вперед, Назад, Стоп, задатчики 15 величины и 16 числа шагов перемещения толкателей 4. Выходы датчиков 7 перемещения соединены с первыми входами соответствующих блоков 10 определения величины перемещения, пусковые элементы 141,142.14з подключены к первому, второму и третьему входам блока 12 управления соответственно, к четвертым, пятым и шестым входам которого подключены соответственно датчики 8 касания толкателей с бортоснасткой 5. исходного и 6 конечного положения толкателей 4. выходы задатчика 16 числа шагов перемещения подключены к первым входам блока 13 счета числа шагов перемещения, выход которого подключен к седьмому входу блока 12 управления и вторым входам блоков 10 определения величины перемещения, к третьим входам которых подключены первые выходы блока 12 управления, второй выход которого подключен к четвертым входам блоков 10 определения ве лйчин ы перемещения и к второму входу блока 13 счета числа шагов, третий и четвертый входы которого подключены к третьему и четвертому выходам блока 12 управления, пятый выход которого подключен к пятым входам блоков 10 определения величины перемещения, шестые входы которых соединены с выходами задатчика 15 величины шага перемещения, первые выходы блоков 10 определения величины перемещения подключены к первым входам блоков 11 усиления, вторые входы к восьмым входам блока 12 управления, шестые и седьмые выходы которого подключены к вторым и третьим входам соответствующих блоков 11 усиления выходы которых подключены к соответствующим входам гидрораспределителей 9 приводов 2 толкателей 4.
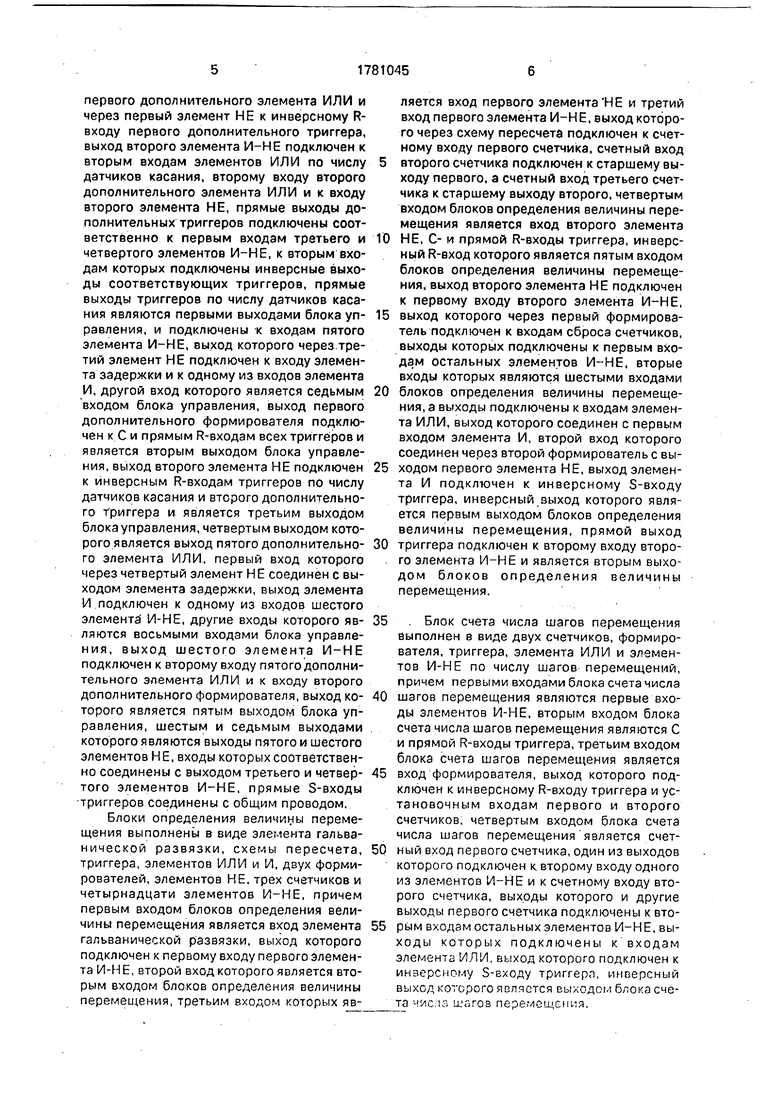
Блок 12 управления (см. фиг. 3) содержит формирователи 17-22 по числу пусковых элементов, датчиков касания толкателей с бортоснасткой. исходного и конемного положения толкателя, триггеров 23 и элементов 24 ИЛИ по числу датчиков 8 касания, двух дополнительных триггеров 25. 26 и формирователей 27, 28, пяти дополнительных элементов 29, 30, 31, 32, 33 ИЛИ,
шести элементов 34-39 И-НЕ и 40-45 НЕ, элемента 46 И и элемента 47 задержки. Первым, вторым, третьим, четвертыми, пятыми и шестыми входами блока 12 управления являются входы соответствующих формирователей. Выход первого формирователя 17 подключен к первому входу первого дополнительного элемента 29 ИЛИ, выход которого подключен к инверсному S-входу первого дополнительного триггера 25, выход второго формирователя 18 к первому входу второго дополнительного элемента 30 ИЛИ, выход которого подключен к инверсному S-входу второго дополнительного триггера 26, выход третьего формирователя
19 подключен к первым входам первого и второго элементов 34,35 И-НЕ, выходы четвертых формирователей 20 по числу датчиков 8 касания подключены к первым входам соответствующих элементов 24 ИЛИ, выходы которых подключены к инверсным S-вхо- дам соответствующих триггеров 23, выходы пятых формирователей 21 по числу датчиков 5 исходного положения толкателей подключены к входам третьего дополнительного
элемента 31 ИЛИ, выход которого подключен к второму входу второго элемента 35 И-НЕ, выходы шестых формирователей 22 по числу датчиков 6 конечного положения толкателей подключены к входам четвертого дополнительного элемента 32 ИЛИ, выход которого подключен к второму входу первого элемента 34 И-НЕ, выход которого подключен к второму входу первого дополнительного элемента 29
ИЛИ и через первый элемент 40 НЕ к инверсному Р-входу первого дополнительного триггера 25. Выход второго элемента 35 И-НЕ подключен к вторым входам элементов 24 ИЛИ по числу датчиков касания, второму входу второго дополнительного элемента 30 ИЛИ и к входу второго элемента 41 НЕ. Прямые выходы дополнительных триггеров 25, 26 подключены соответственно к первым входам третьего и
четвертого элементов 36 и 37 И-НЕ, к вторым входам которых подключены инверсные выходы триггеров 26. 25 соответственно. Прямые выходы триггеров 23 по числу датчиков касания являются первыми выходами блока 12 управления и подключены к входам пятого элемента 38 И-НЕ, выход которого через третий элемент 42 НЕ подключен к входу элемента 47 задержки и к одному из входов элемента 46 И, другой вход которого является седьмым входом блока 12 управления. Выход первого дополнительного формирователя 27 подключен к С- и прямым R-входам триггеров 23, 25, 26 и является вторым выходом блока управления. Выход второго элемента 41 НЕ подключен к инверсным R-входам триггеров 23 по числу датчиков касания и второго дополнительного триггера 26 и является третьим выходом блока 12 управления, четвертым выходом которого является выход пятого дополнительного элемента 33 ИЛИ, первый вход которого через четвертый элемент 43 НЕ соединен с выходом элемента 47 задержки. Выход элемента 46 И подключен к одному из входов шестого элемента 39 И-НЕ, другие входы которого являются восьмыми входами блока 12 управления. Выход шестого элемента 39 И- НЕ подключен к второму входу пятого дополнительного элемента 39 ИЛИ и к входу второго дополнительного формирователя 28, выход которого является пятым выходом блока 12 управления, шестым и седьмым выходами которого являются выходы пятого и шестого элементов 44 и 45 НЕ, входы которых соответственно соединены с выходами третьего и четвертого элементов 36 и 37 И-НЕ, прямые S-входы триггеров 23, 25, 26 соединены с общим проводом.
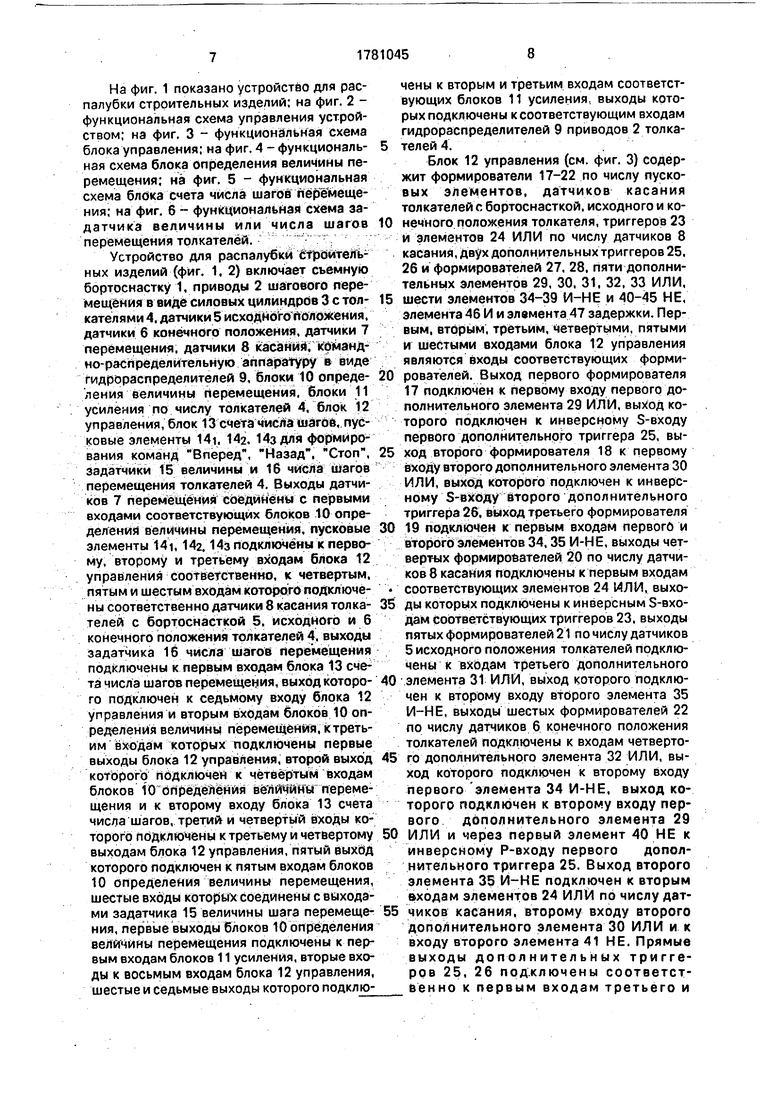
Блоки 10 определения величины перемещения (см. фиг. 4) выполнены в виде элемента 48 гальванической развязки, схемы 49 пересчета, триггера 50, элементов 51 ИЛИ и 52 И, двух формирователей 53, 54, элементов 55, 56 НЕ, трех счетчиков 57, 58, 59 и четырнадцати элементов 60-73 И-НЕ. Первым входом блоков 10 определения величины перемещения является вход элемента 48 гальванической развязки, выхог. которого подключен к первому входу первого элемента 60 И-НЕ, второй вход которого является-вторым входом блоков 10 определения величины перемещения, третьим входом которых является вход первого элемента 55 НЕ и третий вход первого элемента 60 И-НЕ, выход которого через схему 49 пересчета подключен к счетному входу первого счетчика 57, счетный вход второго счетчика 58 подключен к старшему выходу
первого, а счетный вход третьего счетчика 59 к старшему выходу второго. Четвертым входом блоков 10 определения величины перемещения является вход второго элемента 56 НЕ, С и прямой R-входы триггера 50, инверсный R-вход которого является пятым входом блоков 10 определения величины перемещения, выход второго элемента 56 НЕ подключен к первому входу второго
0 элемента , выход которого через первый формирователь 53 подключен к входам сброса счетчиков 57, 58, 59, выходы которых подключены к первым входам остальных элементов 62...73 И-НЕ, вторые
5 входы которых являются шестыми входами блоков 10 определения величины перемещения, а выходы подключены к входам элемента 51 ИЛИ, выход которого соединен с первым входом элемента 52 И, второй вход
0 которого соединен через второй формирователь 54 с выходом первого элемента 55 НЕ. Выход элемента 52 И подключен к инверсному S-входу триггера 50, инверсный выход которого является первым выходом
5 блоков 10 определения величины перемещения, прямой выход триггера 50 подключен к второму входу второго элемента 61 И-НЕ и является вторым выходом блоков 10 определения величины перемещения.
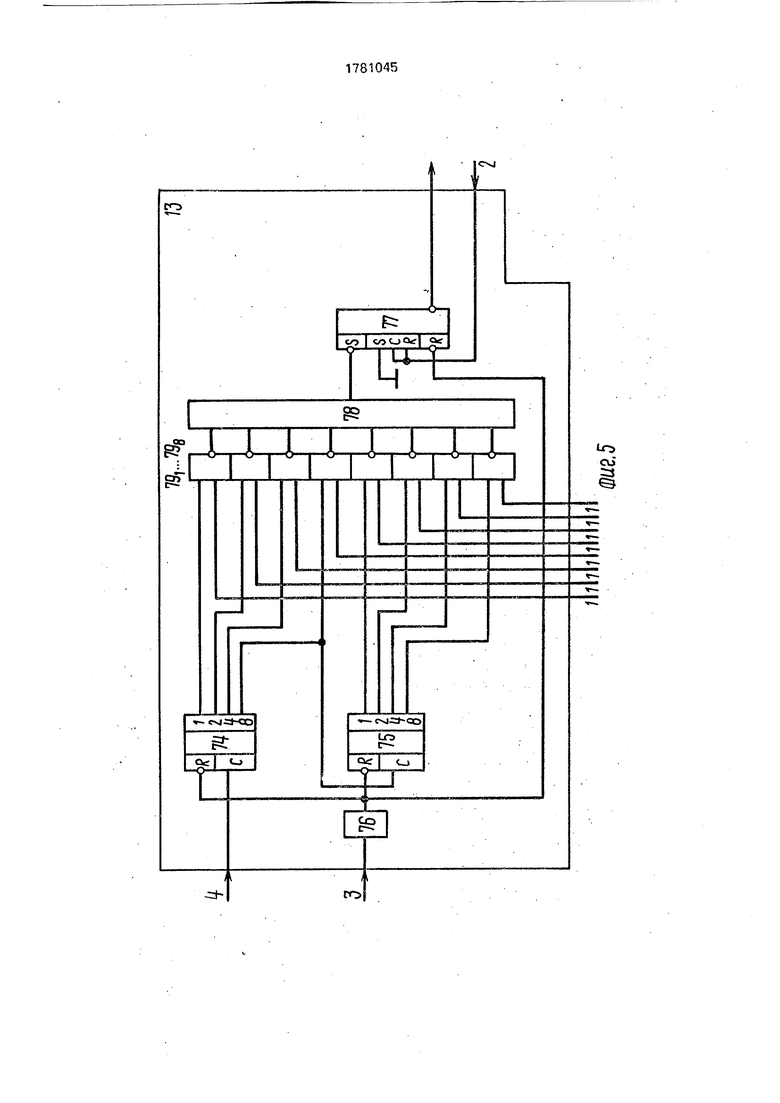
0 Блок 13 счета числа шагов перемещения (см. фиг. 5) включает два счетчика 74, 75, формирователь 76, триггер 77, элемент 78 ИЛИ и элементы 79i...79s И-НЕ по числу шагов перемещений. Первыми входами бло5 ка 13 счета числа шагов перемещения являются первые входы элементов 79 И-НЕ. Вторым входом блока 13 съема числа шагов являются С-и прямой R-входы триггера 77, третьим входом блока 13 счета числа шагов
0 перемещения является вход формирователя 76, выход которого подключен к инверсному R-входу триггера 77 и установочным входам счетчиков 74, 75. Четвертым входом блока 13 счета числа шагов перемещения является
5 счетный вход первого счетчика 74, старший из выходов которого подключен к второму входу одного из элементов 79 И-НЕ и к счетному входу второго счетчика 75, выходы которого и другие выходы первого счетчика
0 74 подключены к вторым входам остальных элементов 79 И-НЕ, выходы которых подключены к входам элемента 78 ИЛИ, выход которого подключен к инверсному S-входу триггера,инверсный выход которого являет5 ся выходом блока 13 счета числа шагов перемещения.
Устройство работает следующим образом.
В зависимости от марки (конфигурации и типоразмеров) изготавливаемого изделия
определяют и задаются величиной шага за- датчиком 15 и требуемым числом шагов за- датчиком 16. Задание с выходов задатчика 15 поступает на шестые входы блоков 10 определения величины перемещения, а с выходов задатчика 16 числа шагов на первые входы блока 13 счета числа шагов. Стро- ительное изделие со съемной бортоснасткой 1 находится в зоне действия устройства для распалубки. Силовые цилин- дры 3 с толкателями 4 привода 2 многоступенчатого перемещения бортоснастки 1 находятся в исходном положении, датчики 5 исходного положения включены и на пятых входах блока 12 управления (фиг. 3), входах и выходах формирователей 21 по числу датчиков 5 исходного положения толкателей 4, третьего дополнительного элемента 31 ИЛИ и втором входе второго элемента 35 И-НЕ имеется низкий уровень сигнала (сигнал О). При подаче питающего напряжения на выходе первого дополнительного формирователя 27 появляется короткий импульс, устанавливающий все триггеры и счетчики блока 12 управления, блоков 10 определения величины перемещения, блоки 13 счета числа шагов в нулевое состояние. Для распалубки строительного изделия пусковым устройством 14т подается команда Вперед на пер- вый вход блока 12 управления (фиг. 3), которая через первый формирователь 17 И первый дополнительный элемент 29 ИЛИ устанавливает на прямом выходе первого дополнительного триггера 25 высокий уро- вень сигнала (сигнал 1), а на инверсном - низкий (сигнал О). При этом на выходе третьего элемента 36 И-НЕ и входе пятого элемента 44 НЕ устанавливается сигнал О, приводящий к появлению 1 на выходе пя- того элемента 44 НЕ и шестом выходе блока 12 управления. С шестого выхода блока 12 управления (фиг. 2) сигнал Г подается на вторые входы блоков 11 усиления. Сигналы разрешающие движение на инверсных вы- ходах триггеров 55 (фиг. 4), первых выходах блоков 10 определения величины перемещения, первых входах блоков 11 усиления имеются (фиг. 2). Выходы блоков 11 усиления обеспечивают включение командорасп- ределительной аппаратуры 9, приводящие к движению силовых цилиндров 3 вперед.
Выполняется подвод толкателей 4 к бортоснастке 1, в момент касания срабатывают датчики 8 касания толкателей 4 с бор- тоснасткой 1 и через четвертые входы блока 12 управления (фиг. 3), формирователи 20 по числу датчиков 8 касания толкателей 4 с бортоснасткой 1, элементы 24 ИЛИ по числу датчиков 8 касания толкателей 4 с бортоснасткой 1 устанавливают на прямых выходах триггеров 23 по числу датчиков 6 касания, входах пятого элемента 38 И-НЕ, первых выходах блока 12 управления сигнал 1. С первых выходов блока 12 управления сигнал Г (фиг. 2) через третьи входы блоков 10 определения величины перемещения поступает на третий вход первых элементов 60 И-НЕ (фиг. 4) и через первые элементы 55 НЕ на вход первых формирователей 54, где формируются короткие импульсы сигналов низкого уровня, которые соответственно устанавливают через элементы 52 И на прямых выходах триггеров 50, вторых выходах блоков 10 определения величины перемещения сигнала Г, а на инверсных выходах и первых выходах блоков 10 определения величины перемещения - сигналов О. Касание толкателей 4 с бортоснасткой 1 не происходит одновременно. Исчезновение сигналов на первых выходах блоков 10 определения величины перемещений и первых входах блоков 11 усиления приведет к прекращению движения силовых цилиндров 3 в момент касания их толкателя 4 с бортоснасткой 1. Опередившие силовые цилиндры 3 ожидают отставшие. Кроме этого, появление сигнала 1 на прямом выходе триггера 50 (фиг. 4) и входе второго элемента 61 И-НЕ приведет к появлению сигнала О на выходе второго элемента 61 И-НЕ и входе второго формирователя 53, а на его выходе и установочных R-входах счетчиков 57...59 кратковременного нулевого сигнала, устанавливающего последние в исходное состояние. Если имеется произвольный ход силового цилиндра 3, достигшего бортосна- стку 1, происходит следующее. На выходе датчика 7 перемещения толкателя появляется серия импульсов, пропорциональная ходу толкателя 4, она поступает на первый вход (фиг. 2) блока Юопределения величины перемещения и далее через элемент 48 гальванической развязки (фиг. 4), первый элемент 60 И-Н Е, схему 49 пересчета поступает на счетный вход первого счетчика 57. Осуществляется отсчет величины перемещения произвольного хода силового цилиндра 3. После касания бортоснастки 1 всеми толкателями 4, установления на всех первых выходах блока 12 управления и третьих входах блоков 10 определения величины перемещения, а также вторых блоков 10 определения величины перемещения и восьмых входах блока 12 управления сигнала Г (фиг. 2), на выходе пятого элемента 38 И-НЕ (фиг. 3), входе третьего элемента 42 НЕ появляется сигнал О. На выходе третьего элемента 42 НЕ и входах элемента 46 И, элемента 47 задержки появляется сигнал
1, На инверсном выходе триггера 77 (фиг, 5), первом выходе блока 13 счета числа шагов, седьмом входе блока 12 управления (фиг. 2) и втором входе элемента 46 И (фиг. 3) сигнал 1 имеется. На выходе элемента 46 И и первом входе шестого элемента 39 И-НЕ появляется сигнал 1, который так как на остальных входах сигналы 1 имеются, приводит к появлению на его выходе, входах пятого дополнительного элемента 33 ИЛИ и второго дополнительного формирователя 28 импульсов сигнала О. На выходе второго дополнительного формирователя 28 импульсов, пятом выходе блока 12 управления и пятых входах блоков 10 определе- ния величины перемещения (фиг, 2), установочных инверсных R-входах триггеров 50 (фиг. 4} появляется кратковременный сигнал О. Триггеры 50 устанавливаются в исходное положение, при этом на их пря- мых выходах, вторых выходах блоков 10 определения величины перемещения, восьмых входах блока 12 управления (фиг. 2) втором и последующих входах шестого элемента 39 И-НЕ (фиг. 3}устанавливается сиг- нал О. Элемент 47 задержки обеспечивает появление сигнала 1 на его выходе и входе четвертого элемента 43 НЕ после описанных выше процессов. Сигнал 1 на выходе элемента 43 НЕ, входе и выходе пятого до- полнительного элемента 33 ИЛИ, четвертом выходе блока 12 управления, четвертом входе блока 13 счета числа шагов (фиг. 2), счетном входе счетчика 14 (фиг. 5) сохраняется, отсчет выполнения шага не происходит. На инверсных выходах триггеров 50, первых входах блоков 11 усиления (фиг. 2) устанавливается сигнал 1, дающий разрешение на отработку первого шага. Происходит включение командно-распределительной аппаратуры 9 (аналогично описанному выше) приводящее к движению силовых цилиндров 3 вперед. С выхода датчиков 7 перемещения толкателя серии импульсов, пропорциональные ходу толкателей 4, про- должают поступать через первые входы бло- ков 10 определения величины перемещения, элементы 48 гальванической развязки (фиг. 4), первые элементы ,60 И-НЕ, схемы пересчета 49 на счетные входы счетчиков 57, Исходной точкой начала отсчета является величина произвольного хода силового цилиндра 3. Когда код величины перемещения на выходе счетчиков 57...S9 совпадет с кодом задания на шестых входах блоков 10 определения величины перемещения (сравнение выполняется на дополнительных элементах 62...73 И-НЕ и элементе 51 ИЛИ), входе и выходе элемента 52 И и инверсном S-входе триггера 50 появляется
сигнал О. На прямом выходе триггера 50, входе второго элемента 61 И-НЕ, втором выходе блока 10 определения величины перемещения и восьмом входе блока 12 управления появится сигнал 1м. На выходе первого элемента 61 И-НЕ и входе второго формирователя 53 установится сигнал О и на его выходе и установочных R-входах счетчиков 57...59 появится кратковременный нулевой сигнал, устанавливающий последние в исходное состояние. На инверсном выходе триггера 50, первом выходе блока 10 определения величины перемещения, первом входе блока 11 усиления появляется сигнал О, приводящий к отключению командно- распределител,ной аппаратуры 9 и прекращению движения силового цилиндра 3. Данный цилиндр отработал шаг и бортосна- стка 1 переместилась на первый уровень (фиг, 1). Если имеет место произвольный ход силового цилиндра 3, то выполняется его учет аналогично описанному выше. После отработки шага всеми силовыми цилиндрами 3, и появлении на восьмых входах блока 12 управления (фиг, 2), втором и последующих входах шестого элемента 39 И-НЕ (фиг. 3} сигнала 1, на выходе шестого элемента 39 И-НЕ, входе и выходе пятого дополнительного элемента 33 ИЛИ. четвертом выходе блока 12 управления, четвертом входе блока 13 счета числа шагов (фиг. 2), счетном входе счетчика 74 (фиг. 5), входе второго дополнительного формирователя 28 (фиг. 3) появляется сигнал О. В блоке 13 счетчики 74,75 увеличивают свое значение на единицу (выполняется счет шагов). На выходе второго дополнительного формирователя 28 (фиг. 3), пятом выходе блока 12 управления и пятых входах блоков 10 определения величины перемещения (фиг. 2), установочных инверсных R-входах триггеров 50 появляется кратковременный сигнал О (фиг. 4). Триггеры 50 устанавливаются в исходное положение, при этом на их прямых выходах, вторых выходах блоков 10 определения величины перемещения, восьмых входах блока 12 управления (фиг, 2), втором и последующих входах шестого элемента 39 И-НЕ (фиг. 3) устанавливается сигнал О. На инверсных выходах триггеров 50, первых выходах блоков 10 определения величины перемещения (фиг. 4), первых входах блоков 11 усиления (фиг. 2) устанавливается сигнал 1, дающий разрешение на отработку следующего шага. Отработка последующих шагов и достижение бортоснасткой 1 уровней 2 и 3 аналогично первому. При отработке заданного количества шагов код на выходе счетчиков 74, 75 (фиг. 5) совпадает с кодом задания на первых входах блока 13 счета
числа шагов (сравнение выполняется на элементах 79 И-НЕ и элементе -78 ИЛИ) на выходе элемента 78 ИЛИ и установочном инверсном S-входе триггера 77 появится сигнал О. На инверсном выходе триггера 77, первом выходе блока 13 счета числа шагов, седьмом входе блока 12 управления (фиг. 2), вторых входах блоков 10 определения величины перемещения, входе элемента 46 И (фиг. 3), входах первых элементов 60 И-НЕ (фиг. 4) появляется сигнал О. Подача импульсов с датчиков 7 (фиг. 2) на входы счетчиков 57 (фиг. 4) прекращается. На выходе элемента 46 И (фиг. 3) и первом входе шестого элемента 39 И-НЕ устанавливается сигнал О, на его выходе, входе и выходе пятого дополнительного элемента 33 ИЛИ, четвертом выходе блока 12 управления, четвертом входе блока 13 счета числа шагов (фиг. 2), счетном входе счетчика 74 (фиг. 5), входе и выходе второго дополнительного формирователя 28 (фиг. 3), пятом выходе блока 12 управления, пятых входах блоков 10 определения величины перемещения (фиг. 2) инверсных Р-входах триггеров 50 (фиг. 4)-сигнал 1. Таким образом, бортос- настка 1 после подъема на заданное число шагов отрывается от изделия и далее шаговое движение силовых цилиндров 3 прекращается, и силовые цилиндры 3 движутся до достижения ими конечного положения без остановок, где срабатывают датчики 6 конечного положения толкателей на шестых входах блока 12 управления, входах и выходах формирователей 22 по числу датчиков конечного положения толкателей (фиг. 3) входах и выходе четвертого дополнительного элемента 32 ИЛИ, втором входе первого элемента 34 И-НЕ, появляется сигнал О. На выходе первого элемента 34 И-НЕ, входах первого дополнительного элемента 29 ИЛИ и первого элемента 40 НЕ устанавливается сигнал 1, а на выходе первого элемента 40 НЕ и инверсном R-входе первого дополнительного триггера 25 и входе третьего элемента 36 И-НЕ, сигнал О, а на инверсном выходе и входе четвертого элемента 37 И-НЕ сигнал 1. На выходе третьего элемента 36 И-НЕ и входе пятого элемента 44 НЕ появляется сигнал 1, приводящий к появлению сигнаяа О на выходе пятого элемента 44 НЕ, шестом выходе блока 12 управления, вторых входах блоков 11 усиления. Происходит отключение командно-распределительной аппаратуры,, силовые цилиндры 3 прекращают движение вперед.
Для возврата устройства в исходное положение пусковым устройством 142 подается команда Назад на второй вход блока 12
управления (фиг. 2), которая через второй формирователь 18 сигнала и второй дополнительный элемент 30 ИЛИ устанавливает на прямом выходе второго дополнительного
триггера 26 сигнала 1. а на инверсном сигнал О. На выходе четвертого элемента 37 И-НЕ и входе шестого элемента 45 НЕ устанавливается сигнал О, приводящий к появлению сигнала 1Н на выходе шестого
0 элемента 45 НЕ и седьмом выходе блока 12 управления. С седьмого выхода блока 12 управления сигнал 1 подается на третьи входы блоков 11 усиления. Выходы блоков 11 обеспечивают включение командно-рас5 пределительной аппаратуры 9, приводящие к движению силовых цилиндров 3 назад. В исходном положении срабатывают датчики 5 исходного положения толкателей 4, на пятых входах блока 12 управления (фиг. 2),
0 входах и выходах формирователей 21 по числу датчиков исходного положения толкателей, входах и выходе третьего элемента 31 ИЛИ. входе второго элемента 35 И-НЕ появляется сигнал О. На выходе элемента 35
5 И-НЕ, входах элементов 30 ИЛИ, 24 ИЛИ по числу датчиков 8 касания толкателей с бор- тоснасткой, входе второго элемента 41 НЕ устанавливается сигнал 1, а на выходе второго элемента 41 НЕ, инверсных R-входах
0 второго дополнительного
триггера 26, триггеров 23 по числу датчиков 8 касания толкателей 4 с бортоснаст- кой 1, третьем входе блока 12 управления, третьем входе блока 13 счета числа шагов
5 (фиг. 2), входе формирователя 76 (фиг. 5} появится сигнал О, устанавливающий триггеры 23, 26 (фиг. 3) в исходное положение. При движении в исходное положение силовых цилиндров 3 датчики 8 касания тол0 кателей 4 с бортоснасткой 1 отключаются. На выходе формирователя 76 (фиг. 5) появляется кратковременный нулевой импульс, устанавливающий счетчики 74, 75 и триггер 77 в исходное положение. На выходе четвер5 того элемента 37 И-НЕ (фиг. 3) и входе шестого элемента 45 НЕ появляется сигнал 1, приводящий к появлению сигнала О на выходе шестого элемента 45 НЕ, седьмом выходе блока 12 управления (фиг. 2), третьих
0 входах блоков 11 усиления. Происходит
отключение командно-распределительной аппаратуры 9, Силовые цилиндры останавливаются в исходном положении. При подаче пусковым устройством 14з команды
5 Стоп на третий вход блока 12 управления (фиг. 2), происходит установка триггеров 23, 25, 26, 77 в исходное положение через элементы 34, 35 И-НЕ и элементы 41, 41 НЕ (фиг. 3} аналогично описанному выше. Изде- лие удаляется из зоны устройства Работа
устройства в следующем цикле аналогична описанному выше.
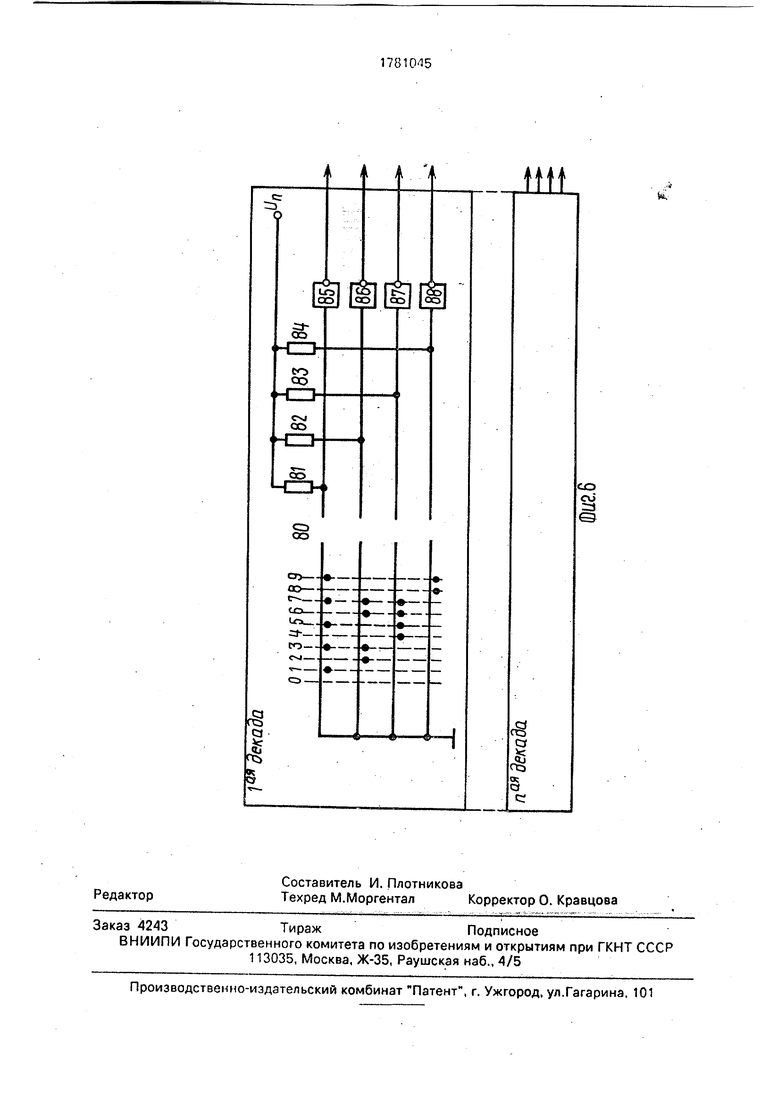
Задатчики 15, 16 величины и числа шагов могут быть выполнены, например, как показано на фиг. 6. Каждая декада задатчи- ка включает программный переключатель 80, например, типа ПП-10, резисторы 81...84, элементы 85...88 НЕ.
Блоки 11 усиления могут быть выполнены, например, как показано на фиг. 2, каждый блок включает логические элементы 89, 90 И-НЕ, усилители 91, 92.
Схема 49 пересчета обеспечивает соответствие величины перемещения к требуемому масштабу величины задания шага и числа шагов.
Изобретение используется при производстве строительных изделий с немедленной их распалубкой или распалубкой после твердения.
При использовании изобретения достигается положительный эффект от:
повышение качества изготовленных изделий (за счет устранения перекосов снимаемой бортоснастки и тем самым исключения механических повреждений изделий);
снижения трудоемкости на доводку механически поврежденных распалубленных изделий;
обеспечения изготовления изделий различной конфигурации и типоразмеров без механической переналадки устройства;
повышения производительности и безопасности работ при изготовлении изделий;
снижения трудозатрат на ремонт и обслуживание устройства.
Формула изобретения
1. Устройство для распалубки строительных изделий, содержащее толкатели, взаимодействующие с бортоснасткой и имеющие приводы шагового перемещения, выполненные в виде силовых, цилиндров с гидрораспределителями, датчики исходного и конечного положений толкателей, датчики перемещения толкателей и пусковые элементы, отличающееся тем, что, с целью повышения производительности распалубки изделий, оно снабжено датчиками касания толкателей с бортоснасткой, задат- чиками величины и числа шагов перемещения толкателей, блоком счета числа шагов перемещения, блоками определения величины перемещения и усиления по числу толкателей и блоком управления, причем датчики
перемещения толкателей подключены к первым входам соответствующих блоков определения величины перемещения, пусковые элементы подключены к первому, второму и третьему входам блока управления, к четвертым, пятым и шестым входам которого подключены соответственно датчики касания толкателей с бортоснасткой, исходного и конечного положений толкателей, выходы задатчика числа шагов перемещения подключены к первым входам блока счета числа шагов перемещения, выход которого подключен к седьмому входу блока управления и к вторым входам блоков опре0 деления величины перемещения, к третьим входам которых подключены первые выходы блока управления, второй выход которого подключен к четвертым входам блоков определения величины перемещения и к
5 второму входу блока счета числа шагов, третий и четвертый входы которого подключены к третьему и четвертому выходам блока управления, пятый выход которого подключен к пятым входам блоков определения ве0 личины перемещения, шестые входы которых соединены с выходами задатчика величины шага перемещения, первые выхо- ды блоков определения величины перемещения подключены к первым входам блоков
5 усиления, вторые выходы - к восьмым входам блока управления, шестые и седьмые выходы которого подключены к вторым и третьим входам соответствующих блоков усиления, выходы которых подключены ксо0 ответствующим входам приводов толкателей.
2. Устройство по п. 1,отличающее- с я тем, что блок управления выполнен в виде формирователей по числу пусковых
5 элементов, датчиков касания толкателей с бортоснасткой, исходного и конечного положений толкателя, триггеров и элементов ИЛИ по числу датчиков касания, двух дополнительных триггеров и формирователей, пя0 ти дополнительных элементов ИЛИ, шести элементов И-НЕ и НЕ, элемента И и элемента задержки, причем первым, вторым, третьим, четвертыми, пятыми и шестыми входами блока управления являются входы соответ5 ствующих формирователей, выход первого формирователя подключен к первому входу первого дополнительного элемента ИЛИ, выход которого подключен к инверсному S- входу первого дополнительного триггера,
0 выход второго формирователя подключен к первому входу второго дополнительного элемента ИЛИ, выход которого подключен к инверсному S-входу второго дополнительного триггера, выход третьего формировате5 ля подключен к первым входам первого и второго элементов И-НЕ, выходы четвертых формирователей по числу датчиков касания подключены к первым входам соответствующих элементов ИЛИ, выходы которых под- ключены к инверсным S-входзм
соответствующих триггеров, выходы пятых формирователей по числу датчиков исходного положения толкателей подключены к
входам третьего дополнительного элемента ИЛИ. выход которого подключен к второму входу второго элемента И-НЕ, выходы шестых формирователей по числу датчиков конечного положения толкателей подключены куходам четвертого дополнительного элемента ИЛИ, выход которого подключен к второму входу первого элемента И-НЕ, выход которого подключен к второму входу первого дополнительного элемента ИЛИ и
.через первый элемент НЕ к инверсному R- входу первого дополнительного триггера, выход второго элемента И-НЕ подключен к вторым входам элементов ИЛИ по числу датчиков касания, второму входу второго дополнительного элемента ИЛИ и к входу второго элемента НЕ, прямые выходы дополнительных триггеров подключены соответственно к первым входам третьего и четвертого элементов И-НЕ, к вторым входам которых подключены инверсные выходы Соответствующих триггеров, прямые выходы триггеров по числу датчиков касания являются первыми выходами блока управления и подключены к входам пятого элемента И-НЕ, выход которого через третий элемент Н Е подключен к входу элемента задержки и к одному из входов элемента И. другой вход которого является седьмым входом блока управления, выход первого дополнительного формирователя подключен к С- и прямым R-входам всех триггеров и является вторым выходом блока управления, выход второго элемента НЕ подключен к инверсным R-входам триггеров по числу датчиков касания и второго дополнительного триггера и является третьим выходом блока управления, четвертым выходом которого является выход пятого дополнительного элемента ИЛИ, первый вход которого через четвертый элемент НЕ соединен с выходом элемента задержки, выход элемента И подключен к одному из входов шестого элемента И-НЕ, другие входы которого являются восьмыми входами блока управления, выход шестого элемента И-НЕ подключен к второму входу пятого дополнительного элемента ИЛИ и входу второго дополнительного формирователя, выход которого является пятым выходом блока управления, шестым и седьмым выходами которого являются выходы пятого и шестого элементов НЕ, входы которых соответственно соединены с выходами третьего и четвертого элементов И-НЕ, прямые S-входы триггеров соединены с общим проводом.
3.Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что блоки определения величины перемещения выполнены в виде элемента гальванической развязки, схемы пересчета,
триггера, элементов ИЛИ и И, двух формирователей, элементов НЕ, трех счетчиков и четырнадцати элементов И-НЕ, причем первым входом блоков определения величины перемещения является вход элемента
0 гальванической развязки, выход которого подключен к первому входу первого элемента И-НЁ, второй вход которого является вторым входом блоков определения величины перемещения, третьим входом которых
5 являетсягеход первого элемента НЕ и третий вход первого элемента И-НЕ, выход которого через схему пересчета подключен к счетному входу первого счетчика, счетный вход второго счетчика подключен к старшему вы0 ходу пёрёого, а Счетный вход третьего счет- - чика к старшему выходу второго, четвертым входом блоков определения величины перемещения ябляются вход второго элемента НЕ, С- и прямой R-входы триггера, инверс5 ный R-вход которого является пятым входом блоков определения величины перемещения, выход второго Элемента НЕ подключен к первому входу второго элемента И-НЕ выход которого через первый формирова0 тель подключен к входам сброса счетчиков,
выходы которых подключены к первым вхо .дам остальных элементов И-НЕ, вторые
. входы которых являются шестыми входами
блоков определения величины пёремеще5 ния, выходы остальных элементов И-НЕ, подключены к входам элемента ИЛИ, выход которого Соединен с первым входом элемента И, второй вход которого соединен через второй формирователь с выходом пер0 вого элемента НЕ, выход элемента И подключен к инверсному S-входу триггера, инверсный выход которого является первым выходом блоков определения величины пе-. ремещения, прямой выход триггера под5 ключей к второму входу второго элемента И-НЕ и является вторым выходом блоков определения величины перемещения.
4.Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что блок счета числа шагов переме0 щения выполнен в виде двух счетчиков, формирователя, триггера, элемента ИЛИ и элементов И-НЕ по числу шагов перемещений, причем первыми входами блока счета числа шагов перемещения являются пер5 вые входы элементов И-НЕ, вторым входом блока счета числа шагов перемещения являются С и прямой R-входы триггера, третьим входом блока счета шагов перемещения является вход формирователя, выход которого
подключен к инверсному R-входу триггера и
установочным входам первого и второго счетчиков, четвертым входом блока счета числа шагов перемещения является счетный вход первого счетчика, один из выходов которого подключен к второму входу одного из элементов И-НЕ и к счетному входу второго счетчика, выходы которого и другие
выходы первого счетчика подключены к вторым входам остальных элементов И-НЕ, выходы которых подключены к входам элемента ИЛИ, выход которого подключен к инверсному S-входу триггера, инверсный выход которого является выходом блока счета числа шагов перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |
| Устройство для учета перемещаемых изделий | 1985 |
|
SU1324045A1 |
| Устройство для измерения угла опережения впрыска топлива в двигатель внутреннего сгорания | 1985 |
|
SU1280177A2 |
| Установка для ультразвуковой сварки | 1986 |
|
SU1391831A1 |
| Устройство для ультразвуковой сварки | 1988 |
|
SU1569146A1 |
| Способ определения уклона железнодорожного пути и устройство для его осуществления | 1985 |
|
SU1296839A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ ПЕРЕМЕЩЕНИЙ В КОД | 1996 |
|
RU2138118C1 |
Использование: строительная индустрия, распалубка изделий, формуемых с применением съемной бортоснастки. Сущность: устройство содержит толкатели взаимодействующие с бортоснасткой и имеющие приводы шагового перемещения, датчики исходного и конечного положений толкателей, датчики перемещения толкателей, датчики касания толкателей с бортоснасткой, задатчики величины и числа шагов перемещения толкателей, блоки определения величины перемещения, блок управления, блок счета числа шагов перемещения, пусковые элементы и блоки усиления. 3 з. п. ф-лы, 6 ил.
3-ц уровень 2-й уровень 1-й уройень
Форма
Ш1Ж1ЖЖЖ
mM- M-jmM-MM.
Фиг.2
ГПГ ТТ
LgJLjgJU},
r, ssss/ss/s г/7 // / / /ss/lYr// // // / , / - , ,/ , ,.Ј&{., - , , /
ъ, ,,,,,,,,,,.,,,,,,.. %у/////////у.
Фие.1
0}
OjSWH8II
Г3
-pr
со
ШТ
r-O-T1-v a со
PE
n
Ј
IS
со
PE
.
9W18II
in
з- о
V
со гlilt
со cu 3
©
eg
I
| Устройство для распалубки строительных изделий | 1986 |
|
SU1412965A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
