Изобретение относится к строительной и грузоподъемной технике, в частности к устройствам для погружения и извлечения свай, шпунта и других строительных конструкций и объектов, подъема и перемещения этих и других объектов преимущественно в стесненных условиях.
Целью изобретения является расширение диапазона регулирования выходных параметров и повышение надежности.
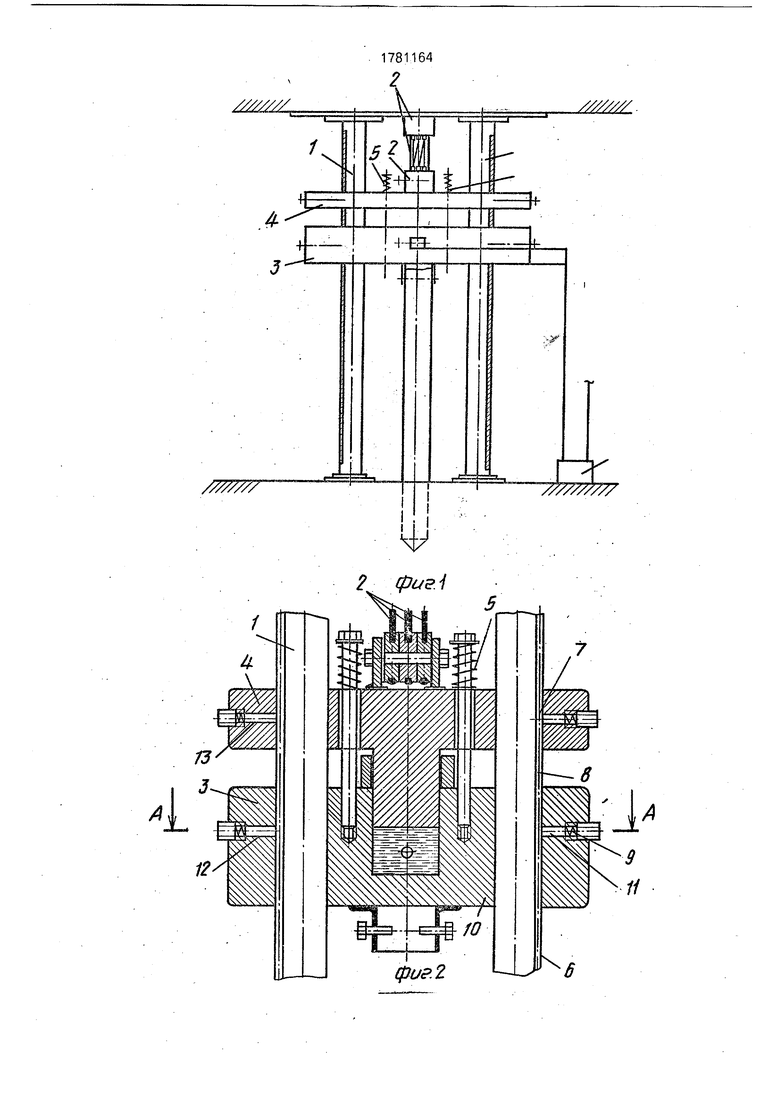
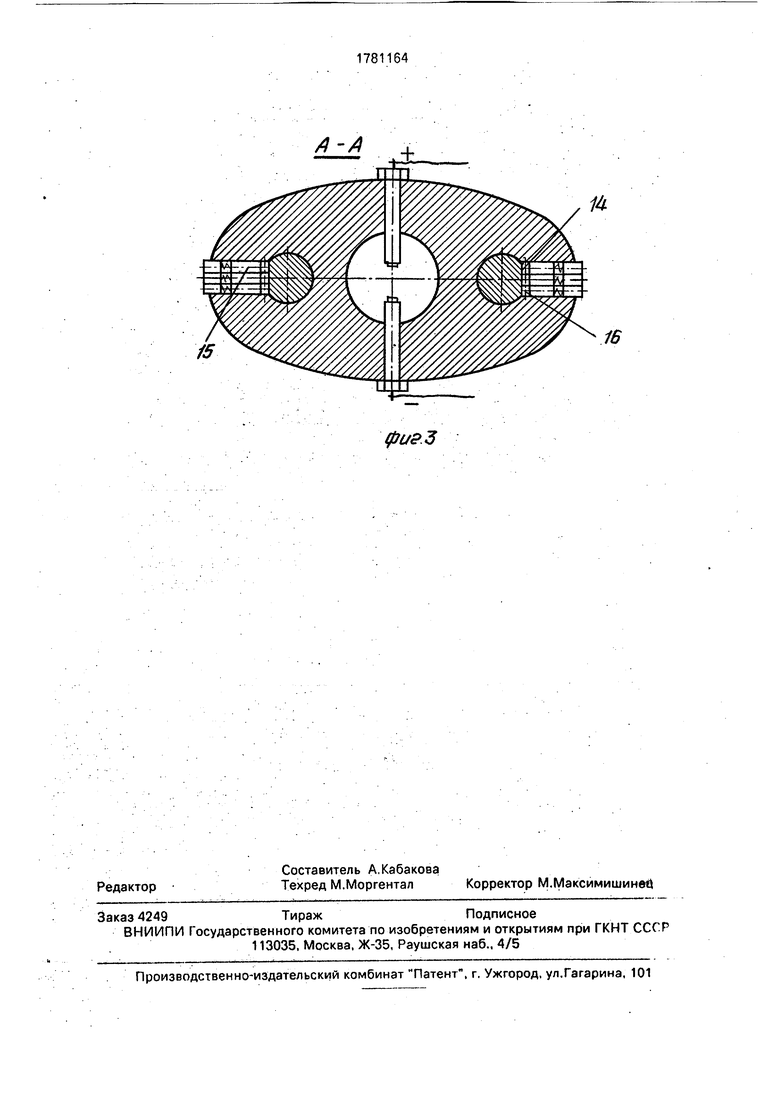
На фиг. 1 представлено устройство, общий вид: на фиг. 2 - силовой привод, разрез по вертикальной оси; на фиг. 3 - разрез А-А по фиг. 2.
Шаговый электрогидравлический домкрат содержит стойки 1. Стойки, выполнены сборными из модульных элементов длиною 1 и 0,5 м на быстродействующих разъемах (одного из известных типов). Сверху стойки 1 связаны с элементами подъемника 2, например, с лебедкой и полиспастом. Подъемник 2 связан электрогидравлическим силовым приводом, включающим корпус 3 с
подвижным рабочим органом 4. Подпружиненные пружинами 5 друг относительно друга рабочий орган 4 и корпус 3 привода свободно насажены на стойки 1. Узел фиксации перемещения привода выполнен в виде пары съемных реек 6 с упорными зубьями 7. Профиль зуба, расположение горизонтальной упорной его грани и наклонной нерабочей, обуславливается требуемым режимом работы устройства, при режиме, кода привод должен смещаться вниз, упорная грань располагается снизу, и наоборот. Каждая из пары реек 6 установлена на срезе 8 стойки 1 С зубьями 7 реек 6 введены в зацепления подпружиненные пружинами 9 регулируемые (например, с помощью винтов 10) собачки 11, установленные в поперечных сверлениях 12, 13 корпуса и рабочего органа.
Узел фиксации перемещения привода может быть дополнительно снабжен одной- двумя (в зависимости от требуемой точности регулирования движения рабочего блока)
СО
с
VI со
ON 4
парами съемных реек 14. А в дополнительных поперечных сверлениях поршня и цилиндра установлено соответствующее количество дополнительных подпружиненных регулируемых собачках 15 и 16, введенных в зацепление с зубьями соответствующих реек. Величина продольного сдвига реек 14 кратна шагу зубьев этих реек (шагу зубьев на всех рейках одинаков): при одной дополнительной паре реек 13 сдвиг составляет полшага, при двух - трети шага.
Шаговый электрогидравлический домкрат работает следующим образом.
В соответствии с объемом рабочего пространства, размером конструкции, с которой необходимо производить манипуляции, величиной перемещения конструкции и пр. подбирают набор модульных элементов и собирают стойки 1. На срез 8 каждой из стоек рамы устанавливают рейку 6. Далее, стойки 1 свободно пропускают сквоз ь соответствующие отверстия в рабочем органе поршня 4 и корпусе 3 электрогидравлического привода, скрепляют эти стойки 1, при необходимости, стяжкой, монтируют на ней соответствующие элементы подъемника 2. Далее, например, для производства работ при вертикальном положении рамы, ее монтируют в этом положении, используя балки, пол и др. специальные и естественные опорные элементы при помощи, в частности, известных монтажных и грузоподъемных средств. При монтаже стойки 1 разворачивают срезами 8 с рейками 6 наружу так, чтобы упоры зубьев 7 находились снизу. При необходимости стойки 1 закрепляют винтовыми распорками.
Затем в соответствующие отверстия корпус 3 и рабочего органа 4 устанавливают подпружиненные пружинами 9 собачки 11, регулируют их положение винтами 10 и вводят в зацепление с зубьями 7 реек 6. После этого электрогидравлический привод включают. При этом, как известно в момент подачи высоковольтного электрического заряда на электроды в корпусе 3 заполненном жидкостью, например, водой, создается электрогидравлический эффект, в результате которого происходит смещение корпуса 3 и рабочего органа 4 относительно друг друга. Подпружиненные собачки 11, упираясь в упорные поверхности зубьев 7 реек 6 фиксируют положение рабочего органа 4 перемещение вниз, при проскальзывании подпружиненных собачек 11 по наклонным граням зубьев 7 реек 6, получает корпус 3 с конструкцией. При этом корпус 3 увлекает за собой рабочий орган 4, под воздействием сжатых пружин 5 Процесс при
многократной подаче разряда носит периодический характер. Величину перемещения и его скорость, которые зависят от мощности высоковольтного электрического разряда и от частоты этих разрядов регулируют блоком.
Для работы домкрата на подъем конструкции или ее извлечение из грунта зубчатые рейки 6 и собачки 11 разворачивают на
0 180 .
При выполнении домкрата фиг. 3, его работа отличается повышенной точностью перемещения за цикл по сравнению с предыдущем случаем (точность перемещения
5 здесь порядка половины шага зубьев рейки). В том случае, когда точность надо повысить вдвое, на соответствующие срезы 8 стоек 1 устанавливают со сдвигом на полшага по одной дополнительной зубчатой рейке
0 14. В соответствующие сверления рабочего органа 4 и корпуса 3 устанавливают дополнительные подпружиненные регулируемые собачки 15 или 16, их вводят в зацепление с зубьями соответствующих реек. В том слу5 чае, когда точность надо повысить втрое, на соответствующие срезы стоек со сдвигом на треть шага устанавливают обе дополнительные зубчатые рейки и соответствующее собачки 15 и 16. В остальном работа
0 устройства аналогична описанному выше. Формула изобретения
1.Шаговый электрогйдравлический домкрат, содержащий направляющие стойки с поперечными пазами, силовой привод,
5 корпус и рабочий орган которого установлены подвижно относительно стоек с возможностью взаимодействия с ними при помощи храпового механизма, отличающийся тем, что, с целью расширения диапазона
0 регулирования выходных параметров и повышения надежности, привод выполнен электрогидравлическим, его корпус и рабочий орган подпружинены относительно друг друга, направляющие стойки снабжены
5 сменными рейками, а взаимодействующие с пазами реек собачки храпового механизма установлены непосредственно в корпусе и рабочем органе,
2.Домкрат по п. 1,отличающийся 0 тем, что каждая направляющая снабжена по
меньшей мере одной дополнительной рейкой, взаимодействующей с дополнительной собачкой храпового механизма и установленной с вертикальным смещением относи- 5 тельно основной рейки.
3 Домкрат по пп. 1 и 2, отлича ющи- й с я тем, что собачки храпового механизма выполнены в виде подпружиненных штырей со скосами, установленных в поперечных сверлениях корпуса и рабочего органа
фиг 2
А -А
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый подъемник | 1989 |
|
SU1675192A1 |
| СПОСОБ СООРУЖЕНИЯ ЦИЛИНДРИЧЕСКОГО РЕЗЕРВУАРА МЕТОДОМ ПОДРАЩИВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2261313C2 |
| Устройство для маркировки изделий | 1972 |
|
SU477758A1 |
| Каретка кривовязюка к устройству дляВыРубКи зАгОТОВОК из пОлОСОВОгОМАТЕРиАлА | 1979 |
|
SU841732A1 |
| Устройство для транспортировки контейнеров | 1986 |
|
SU1311985A1 |
| Магнитное грузозахватное устройство | 1989 |
|
SU1763341A1 |
| УСТРОЙСТВО ДЛЯ ПРОТИВОСКОЛЬЖЕНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2053132C1 |
| Реверсивный храповой механизм | 1985 |
|
SU1499016A1 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1184792A1 |
| КОМБАЙН ДЛЯ ВЫЕМКИ ПЛАСТОВЫХ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И СПОСОБ ИХ ВЫЕМКИ | 2008 |
|
RU2362876C2 |
Использование: в строительной и грузоподъемной технике. Сущность изобретения: корпус и рабочий орган силового привода установлены подвижно относительно направляющих стоек с возможностью взаимодействия с ними при помощи храпового механизма. Привод выполнен электрогидравлическим, его корпус и рабочий орган подпружинены друг относительно друга. Стойки снабжены сменными рейками. Взаимодействующие с пазами реек собачки храпового механизма установлены непосредственно в корпусе i и рабочем органе. Каждая направляющая снабжена дополнительной рейкой, взаимодействующий с дополнительной собачкой и установленной с вертикальным смешением относительно основной рейки. Собачки выполнены в виде подпружиненных штырей со скосами, установленных в поперечных сверлениях корпуса и рабочего органа. 2 з.п. ф-лы, 3 ил.
| Шаговый механизм перемещения | 1980 |
|
SU925853A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
