Изобретение относится к области машиностроения, а именно к способам управления роботами и манипуляторами, предназначенными для механизации и автоматизации основных и вспомогательных операций.
Наиболее близким к изобретению является техническое решение, в котором реализован способ перемещения подвижного звена резонансного манипулятора, заключающийся в том, что расфиксируют подвижное звено, включают электродвигатель, перемещают подвижное звено с помощью упругих элементов и электродвигателя, включают электродвигатель, фиксируют подвижное звено.
Недостатком его является то, что в момент расфиксации подвижного звена включают электродвигатель. При этом величина, силы тока, потребляемого им, превышает в несколько раз номинальную величину/Аналогичное явление возникает при выключении электродвигателя в момент фиксации
подвижного звена. Таким образом, имеют место большие затраты электроэнергии и сокращается срок службы электродвигателя.
Цель изобретения - уменьшение энергозатрат и увеличение срока службы электродвигателя.
Указанная цель достигается тем, что по способу управления перемещением подвижного звена, заключающемуся в расфик- сации подвижного звена, включении электродвигателя, перемещений подвижного звена с помощью упругих элементов и электродвигателя, выключении электродвигателя и фиксации подвижного звена, время работы электродвигателя, необходимое для компенсации потерь энергии, меньше времени перемещения подвижного звена.
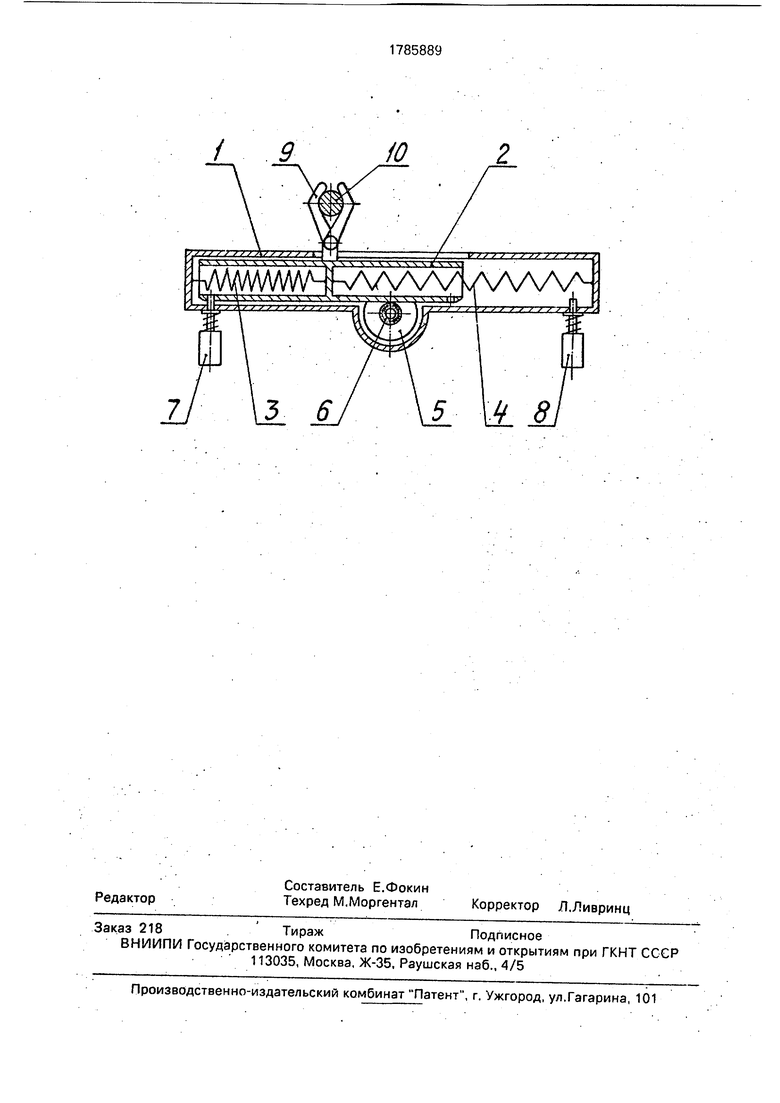
На чертеже изображено устройство, реализующее способ.
Устройство состоит из корпуса 1, в котором размещено подвижное звено 2. Привод перемещения подвижного звена содержит
&
Ј
Ы
00
ел
00
00
о
упругие элементы 3 и А в виде пружин растяжения и реверсивный приводной электродвигатель 5 для восполнения потерь энергии, взаимодействующий с подвижным звеном 2 посредством насадки.6. В крайних положениях подвижное звено 2 фиксируется электромагнитными защелками 7 и 8. Схват 9, закрепленный на подвижном звене 2, служит для переноса детали 10.
Способ управления перемещением подвижного .резонансного звена заключается в том, что время to работы.электродвиг.ателя 5 меньше времени, перемещения подвижного звена 2 и осуществляется следующим образом.
Подвижное звено 2 перед началом движения находится в одном из крайних положений, где удерживается защелкой 7. При этом упругий элемент 3 находится в сжатом, ненапряженном состоянии, а упругий элемент 4 растянут и воздействует на подвижное звено 2 в направлении противоположного крайнего положения.
Расфиксация подвижного звена 2 происходит после подачи напряжения на защелку 7. При этом подвижное звено 2 под действием упругого элемента 4 начинает движение. Насадка 6 электродвигателя 5, находясь в контакте с подвижным звеном 2, раскручивается им. Это вращение переда- ется на вал электродвигателя 5, который находится в отключенном состоянии. Если теперь подать напряжение на электродвигатель 5 через время ti после расфиксации подвижного звена 2, то величина пускового тока будет существенно ниже, чем если бы его вал не вращался. При этом чем больше скорость вращения вала электродвигателя приближается к номинальной, тем больше сила пускового тока приближается к номинальной. .
После перехода подвижного звена 2 в противоположное крайнее положение электродвигатель 5 выключается и защелка 8 фиксирует подвижное звено 2, При этом возникает аналогичное явление - снижение силы тока электродвигателя 5, если его выключить за время ta дог момента фиксации подвижного звена 5 защелкой 8.
Наилучших результатов можно добиться, используя задержку включения электродвигателя 5 после расфиксации подвижного
звена 2 и опережение его включения до фиксации подвижного звена 2 в одном цикле перемещения подвижного звена 2. При этом надо учитывать, что за оставшееся, время
5 работы электродвигателя 5 им должна быть обеспечена компенсация потерь энергии при перемещении подвижного звена 2.
Регулировку времени включения или выключения электродвигателя 5 можно про0 изводить перемещением датчиков положения подвижного звена 2.
Другим, вариантом регулировки времени включения электродвигателя 5 может быть сигнал от датчика скорости вращения
5 вала электродвигателя, срабатывающего при достижении валом такой скорости вращения, при которой сила пускового тока электродвигателя не превышает какой-либо заданной величины, например номиналь0 ной силы тока.
Формула изобретения 1. Способ управления перемещением подвижного звена резонансного манипу5 лятора, заключающийся в том, что рас- фиксируют подвижное звено, включают электродвигатель, перемещают подвижное звено с помощью упругих элементов и электродвигателя, выключают электродвигатель.
0 и фиксируют подвижное звено, отличающийся тем, что, с целью уменьшения энергозатрат и увеличения срока службы электродвигателя, время to работы электродвигателя, необходимое для компенсации
5 потерь энергии, меньше времени Т перемещения подвижного звена.
2. Способ по п. 1, о т л и ч а ю щ и и с я тем, что электродвигатель включают через время ti после расфиксации подвижного 0 звена при соблюдении неравенства .
3. Способ по п. 1, о т л и ч а ю щ и и с я теЦ, что электродвигатель выключают за время t2 до фиксации подвижного звена при 5 соблюдении неравенства
T-t2 5:t0:.
4. Способ по п. 1, о т л и ч а ю щ и и с я тем, что электродвигатель включают через время ti после расфиксации подвижного 0 звена и выключают за время t2 до его фиксации при соблюдении неравенства T-(ti + t2) to. . .

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления резонансной механической рукой | 1989 |
|
SU1641607A1 |
| Способ управления резонансной механической рукой | 1985 |
|
SU1346419A1 |
| Модуль резонансного манипулятора | 1986 |
|
SU1799723A1 |
| РЕЗОНАНСНЫЙ ПРИВОД | 1999 |
|
RU2162791C2 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
| Способ управления резонансной механической рукой | 1986 |
|
SU1366388A1 |
| Способ контроля механической передачи звеньев манипуляторов | 1989 |
|
SU1803319A1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1710335A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662839A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1611730A1 |
.Изобретение относится к области машиностроения, а именно к способам управле- ния роботами и манипуляторами, предназначенными для механизации и автоматизации основных и вспомогательных операций. Цель изобретения - уменьшение энергозатрат и увеличение срока службы электродвигателя. Способ управления перемещением подвижного звена резонансного .манипулятора заключается в том, что рас- фиксируют подвижное звено, включают электродвигатель, перемещают подвижное звено с помощью упругих элементов и электродвигателя, выключают электродвигатель, фиксируют подвижное звено, при этом время работы электродвигателя меньше времени перемещения подвижного звена. 3 з.п. ф-лы, 1 ил.. . .
| Привод перемещения звена преимущественно промышленного робота | 1984 |
|
SU1511107A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
