а
с
ел
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано, например, для перемещения схватов роботов.
Целью изобретения является упрощение настройки привода и повышение надежности.
На чертеже представлена схема привода.
Привод перемещения звена состоит из корпуса 1, в котором размещено перемещаемое звено 2, снабженное реверсивным двигателем 3, упоров-фиксаторов 4 и 5, постоянно нагруженных упругих элементов 6 и 7 растяжения или сжатия, усилия от которых на подвижное звено 2 направлены в противоположные стороны. На звене 2 установлен схват 8. Длина упругих элементов 6 и 7 Б свободном состоянии выбирается из условия, что в любом положении перемещаемого звена 2 усилие со стороны каждого из упругих элементов б и 7 на него не равно нулю.
Привод перемещения звена промыщлен- ного робота работает следующим образом.
Перед началом движения подвижное звено 2 находится в одном из крайних положений и удерживается упором, например фиксатором 4. По команде от устройства управления (не показано) упор- фиксатор 4 освобождает подвижное звено 2, и оно под действием упругих элементов 6 и 7 перемещается в направлении противоположного упора-фиксатора 5. Одновременно с началом движения подвижного звена 2 включается двигатель 3, компенсирующий потери энергии в элементах привода. К моменту захвата фиксатором 5 подвижного звена 2 его скорость замедляется до нуля, а двигатель 3 находится в отключенном состоянии. Замедление скорости звена 2 до нуля при подходе к фиксаторам 4 и 5 осуществляется настройкой двигателя 3 и обеспечивается симметричной суммарной характеристикой жесткости упругих элементов 6 и 7, усилия действия которых на перемещаемое звено 2 находятся в противофазе.
Формула изобретения
Привод перемещения звена преимущественно промышленного робота, содержащий корпус, в котором расположено перемещаемое звено, двигатель, связанный с перемещаемым звеном, фиксаторы положения пе- ремещаемого звена и упругие элементы, одним концом связанные с корпусом, а другим - с перемещаемым звеном, отличающийся тем, что, с целью упрощения настройки привода и повыщения надежности, упругие элементы установлены в противофазе, а длина каждого упругого элемента в свободном состоянии удовлетворяет неравенству.
LC - 4- X или ,
гдеL-
где LC -длина упругого элемента сжатия в свободном состоянии;
LP - длина упругого элемента растяжения в свободном состоянии;
X - амплитуда перемещения звена от центрального положения равновесия;
А - расстояние между точками связи концов упругих элементов с корпусом;
Y - расстояние между точками связи концов упругих элементов с перемещаемым звеном.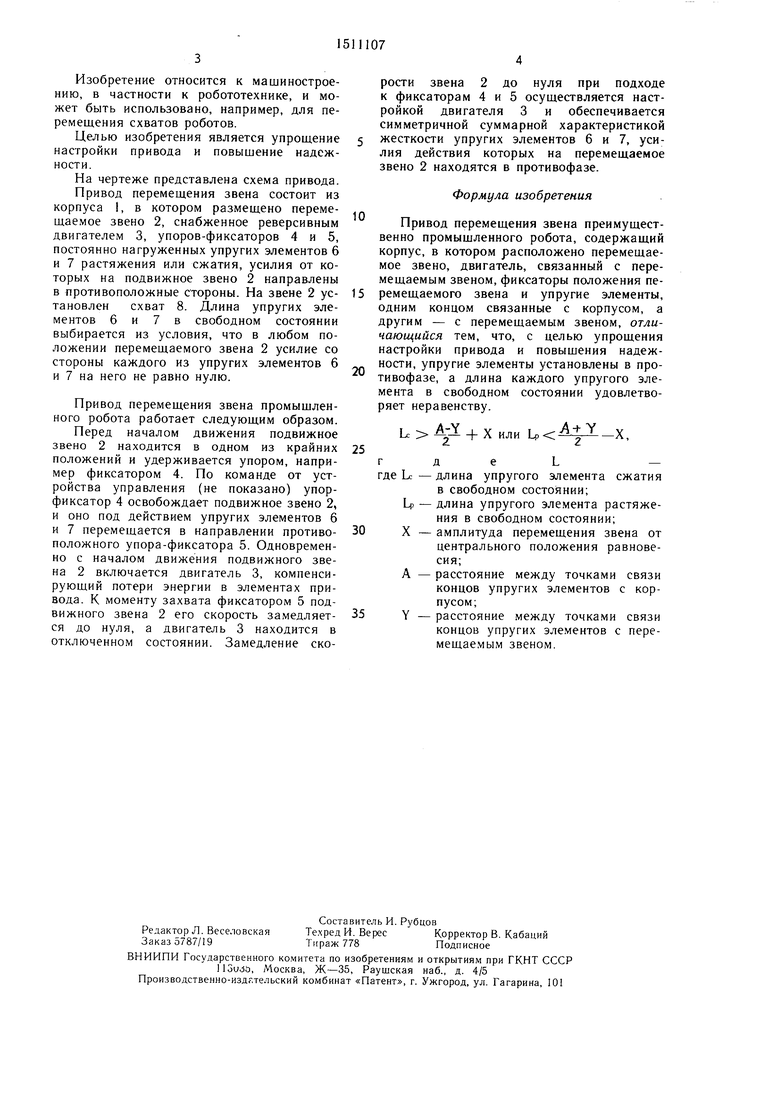
| название | год | авторы | номер документа |
|---|---|---|---|
| Резонансный робот | 1988 |
|
SU1562129A1 |
| Захватное устройство | 1985 |
|
SU1240579A1 |
| Транспортирующее устройство | 1991 |
|
SU1812097A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| L-координатное устройство для определения положения или перемещения объекта в пространстве | 1987 |
|
SU1519869A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Резонансная механическая рука | 1982 |
|
SU1171306A1 |
| Сельскохозяйственный робот-комбайн | 2019 |
|
RU2728225C1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1712140A1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
Изобретение относится к области машиностроения, в частности к робототехнике, и может быть использовано для перемещения, например, схватов роботов. Целью изобретения является упрощение настройки привода и повышение надежности. Перемещение звена 2 происходит между крайними положениями, фиксируемыми упорами - фиксаторами 4,5 под действием упругих элементов 6,7. Двигатель 3 компенсирует потери энергии на трение при перемещении. 1 ил.
| Промышленный робот | 1983 |
|
SU1119837A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
