я
-ь
VI
Ю Ю vj
ю со
Изобретение относится к машиностроению, а именно к манипуляторам резонанс- ного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности.
Цель изобретения - уменьшение энергозатрат, упрощение конструкции и повышение надежности работы.
Указанная цель достигается тем, что в модуле резонансного манипулятора, содержащем корпус/подвижное звено с приводом его перемещения, средства фиксации подвижного звена размещены на корпусе и подвижном звене. Причем средства фиксации, размещенные на подвижном звене, выполнены в виде гнезд, а средство фиксации на корпусе выполнено в виде защелки, установленной с возможностью регулировки ее положения.
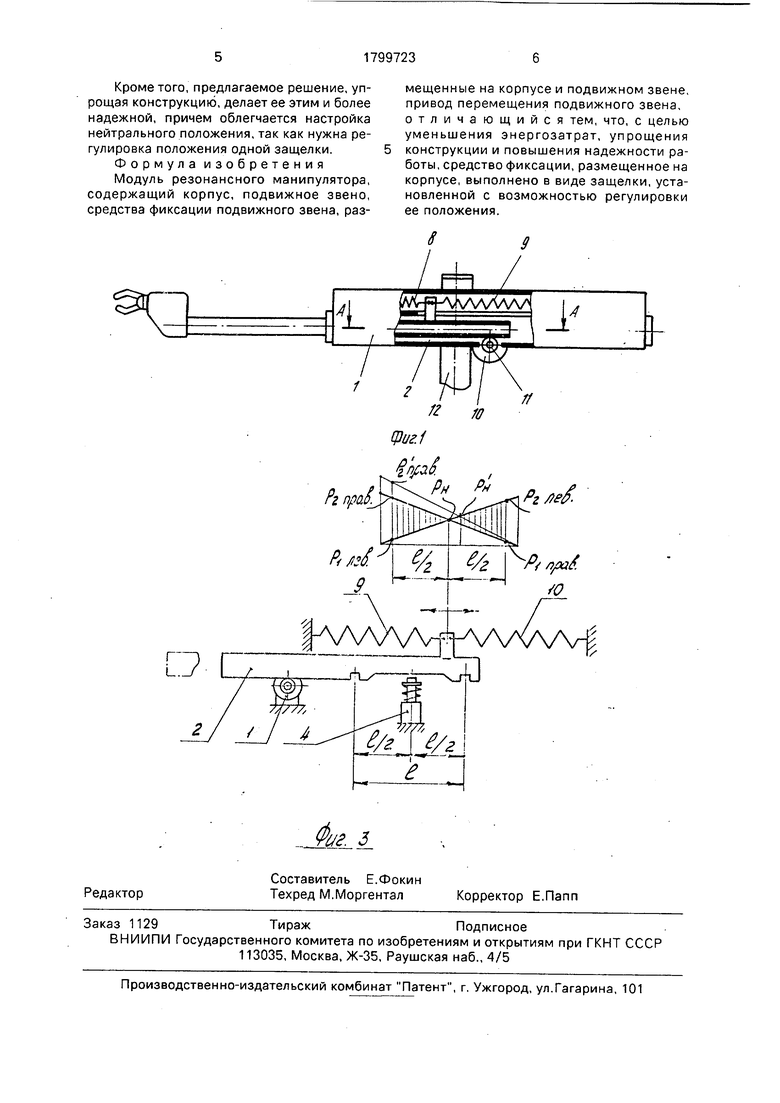
На фиг, 1 представлен модуль; на фиг, 2 показаны в разрезе А-А на фиг. 1 корпус модуля и подвижное звено; на фиг, 3 схематично показано подвижное звено в нейтральном положении и расположение защелки.
Модуль резонансного манипулятора состоит из корпуса 1, в котором расположено подвижное звено 2, перемещающееся в опорах качения (не показаны) и удерживаемое в крайних положениях средствами фиксации на самом звене 2 в виде гнезд 3, а на корпусе 1 в виде защелки 4, установленной при помощи кронштейна 5 с удлиненными отверстиями 6 посредством винтов 7, перемещение обеспечивается приводом с пружинами 8, 9 растяжения, каждая из которых закреплена одним концом на подвижном звене 2, а другим на корпусе 1, а также с реверсивным электродвигателем 10, насадка 11 которого находится в контакте с подвижным звеном 2, Корпус модуля закреплен на основании или подвижном звене 12 другого модуля.
Работает модуль резонансного манипулятора следующим образом.
Подвижное звено 2, находясь в одном из крайних положений, например в левом, удерживается защелкой 4. При этом пружина 8 находится в сжатом (ненапряженном) состоянии, а пружина 9 в растянутом. По команде от управляющего устройства (не показано) срабатывает электромагнит защелки 4 и она выходит из соответствующего этому положению гнезда подвижного звена 2, которое под действием пружины 9 начинает движение в сторону другого крайнего положения. Насадка 11 включающегося при этом реверсивного электродвигателя 10,
воздействуя на подвижное звено 2, сообщает ему дополнительную энергию, компенсирующую потери, что позволяет звену 2 перейти в положение, при котором защелка
попадает в другое гнездо. При этом электродвигатель 10 отключается, пружина 9 оказывается в сжатом состоянии, пружина 8 в растянутом. При установке защелки на равном расстоянии от гнезд подвижного звена 2, ког0 да оно находится в нейтральном положении, количество энергии, которое необходимо сообщить подвижному звену для перемещения его в одном направлении (до момента попадания защелки в одно из гнезд подвижного звена
5 2), равно количеству энегргии, необходимому для перемещения его в противоположном направлении. Об этом говорит равенство площадей треугольников на фиг. 3.
Отсюда равны и количества энергии, за0 пасаемые пружинами 8 и 9 в любом из этих крайних положений, а следовательно, равны и количества дополнительной энергии, требующейся для обеспечения перемещения подвижного звена из одного крайнего
5 положения в другое и обратно.
На практике, как правило, реальное нейтральное положение подвижного звена не совпадает с теоретическим. Это происходит, например, из-за отличия свойств упру0 гих элементов, имеющих неизбежные отклонения в пределах допуска, причем каждая замена упругих элементов в процессе эксплуатации приводит к изменению этого нейтрального положения. Закрепление
5 кронштейна 5 с защелкой 4 на корпусе 1 с возможностью регулирующего перемещения вдоль направления движения подвижного звена 2, например, с помощью винтов 7, размер отверстий 6 под которые в кронш0 теине 5 выполнен увеличенным в этом направлении и равным величине регулирующего перемещения, позволяет привести положение защелки 4 в соответствие реальному нейтральному положению
5 подвижного звена 2, а следовательно, избежать дополнительных энергозатрат, неизбежных в противном случае.
Иногда бывает полезным специально изменить нейтральное положение, сместив
0 его в ту или иную сторону, например, при перемещении грузов значительной массы в одном направлении. Такая настройка обеспечивает запас большего количества потенциальной энергии у той пружины, которая
5 находится в напряженном состоянии перед началом перемещения подвижного звена с грузом и меньший запас потенциальной энергии у пружины, за счет которой в основном происходит перемещение подвижного звена без груза.
Кроме того, предлагаемое решение, упрощая конструкцию, делает ее этим и более надежной, причем облегчается настройка нейтрального положения, так как нужна регулировка положения одной защелки. Формула изобретения Модуль резонансного манипулятора, содержащий корпус, подвижное звено, средства фиксации подвижного звена, размещенные на корпусе и подвижном звене, привод перемещения подвижного звена, отличающийся тем, что, с целью уменьшения энергозатрат, упрощения конструкции и повышения надежности работы, средство фиксации, размещенное на корпусе, выполнено в виде защелки, установленной с возможностью регулировки ее положения.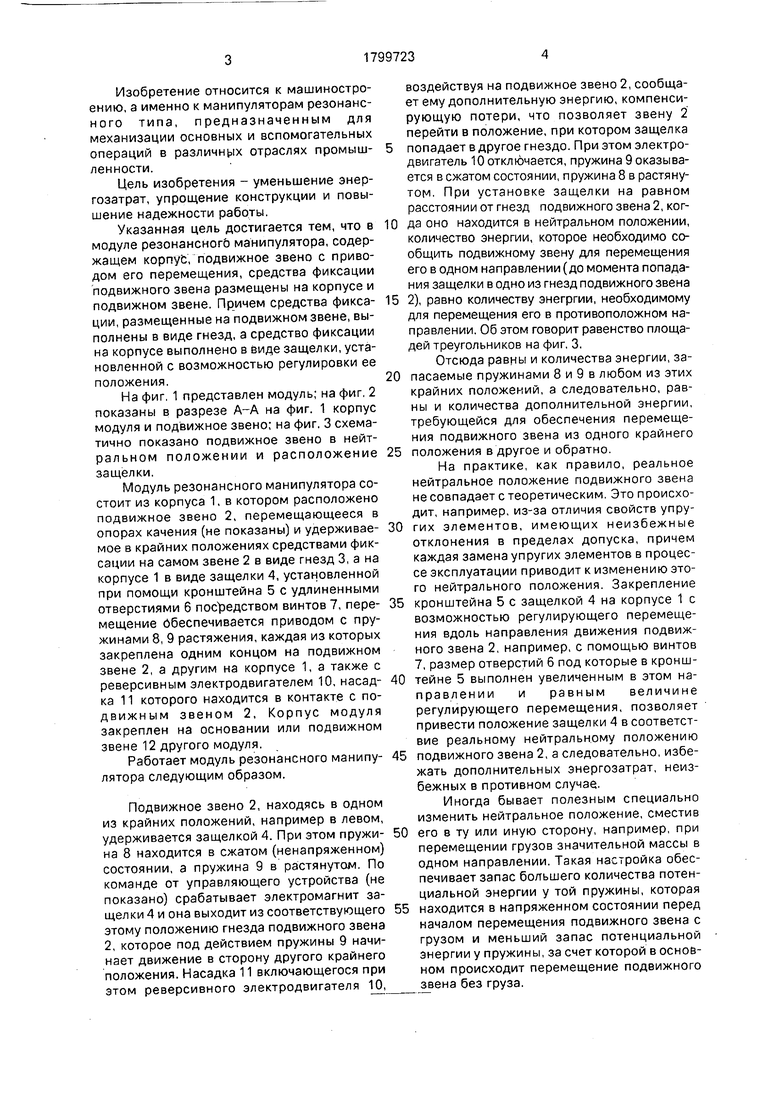
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль резонансного манипулятора | 1989 |
|
SU1712140A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1576304A1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1710335A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662839A1 |
| Способ управления перемещением подвижного звена резонансного манипулятора | 1986 |
|
SU1785889A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662837A1 |
| Модуль резонансного манипулятора | 1985 |
|
SU1298069A1 |
| Модуль вертикального перемещения | 1986 |
|
SU1386444A1 |
| РЕЗОНАНСНЫЙ ПРИВОД | 1999 |
|
RU2162791C2 |
| Модуль вертикального перемещения | 1984 |
|
SU1229032A1 |
Изобретение относится к машиностроении, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности. Целью изобретения является уменьшение энергозатрат, упрощение конструкции и повышение надежности работы, 4-Л Модуль резонансного манипулятора состоит из корпуса 1, подвижного звена 2 со сред- ствами фиксации. При этом средства фиксации на звене 2 выполнены в виде гнезд 3, а средство фиксации на корпусе 1 выполнено в виде защелки 4, установленной при помощи кронштейна 5 с отверстиями 6, посредством винтов 7. При этом защелка 4 благодаря увеличенным отверстиям 6 кронштейна 5 имеет возможность перемещаться вдоль корпуса 1 для настройки нейтрального положения подвижного звена 2. Перемещение подвижного звена 2 обеспечивается приводом, содержащим пружины растяжения, каждая из которых закреплена одним концом на подвижном звене 2, а другим на корпусе 1, а также реверсивным электродвигателем 10, насадка которого находится в контакте с подвижным звеном 2. Корпус 1 модуля закреплен на основании или подвижном звене другого модуля. 3 ил. Ё
| Промышленный робот | 1983 |
|
SU1119837A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Модуль резонансного манипулятора | 1985 |
|
SU1298069A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
