Изобретение относится к технол(5 гическому оборудованию для механизации и автоматизации- вспомогатель ных технологических операций и мож быть использовано в цехах механической обработки, ковки, штамповки и сборки на операциях перемещения деталей. Известен манипулятор, содержащий привод, один из которых выполне в виде силового цилиндра, кинемати чески связанного с механической ру кой, несущей охват, и снабженный дополнительным силовым цилиндром, корпус которого жестко связан с кор пусом основного, на внутренней поверхности дополнительного цилиндра выполнен винтовой паз, шток этого силового цилиндра установлен на што ке основного с возможностью осевого перемещения относительно него, а площадь поршня дополнительного сило вого цилиндра меньше, чем площадь поршня основного, причем на штоке дополнительного силового цилиндра выполнен паз, а на штоке основного силового цилиндра установлены два пальца, один из которых размещен в винтовом пазу дополнительного цилин дра, а второй жестко связан с механической рукой и расположен в пазу цггока дополнительного силового ди-линдра l . Однако т.аг.ая конструкция манипулятора не обеспечивает плоско-парал лельное перемещение схвата и последовательности, вертикального переме щения и поворота механической руки от одного привода, что сужает его функциональные возможности. Цель изобретения - расширение функциональных возможностей. Поставленная цель достигается тем, что манипулятор, содержащий основание, силовой цилиндр с воздухораспределителем, снабженным систе мой управления и установленным на штоке ползуном, кинематически связанным с механической рукой, несу-, щей схват, выполненный в виде опорной пластины с электромагнитами, и два паль.ца, снабжен стаканом, в котором вьтолнены пазы на образующе поверхности - поперечный и винтовой а в дне - секторный, установленным подвижно на силовом цилиндре, поворотным кольцом и стержнем, закреп ленным на ползуне, расположенном в секторном пазу стакана и несущем на свободном конце тягу, образующую вместе с механической рукой и опорной пластиной схвата.плоско-параллельный механизм, при этом в ползун и в силовомцилиндре выполнены фигурные пазы, один из пальцев закреп лен на кольце и расположен в поперечном пазу стакана и в фигурных па зах ползуна и силового, цилиндра, а другой палец закреплен на ползуне и расположен в винтовом пазу стакана. Кроме того, схват снабжен концевым выключателем и подвижными стойками, на которых установлены злектромагниты, подпружиненные к опорной пластине и электрически связанные через концевой выключатель с системой управления воздухораспределителем. На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 1. Манипулятор содержит основание 1, силовой цилиндр 2 с воздухораспределителем 3 и установленньам на штоке 4ползуном 5, кинематически связанный посредством ползуна 5, стакана б и пальца 7 с механической рукой 8, жестко закрепленной на оси стакана и несущей схват, выполненный в виде опорной пластины 9 с электромагнитами 10. Стакан 6 подвижно установлен на наружно: : поверхности силового цилиндра 2. На образующей поверхности стакана выполнены поперечный 11 и винтовой 12 пазы. Палец 13 расположен в винтовом пазу 12. Палец 7 закреплен на поворотном кольце 14, охватывающем ползун 5, и расположен в поперечном пазу 11, в фигурном пазу 15 ползуна 5 и в фигурном пазу 16 силового цилиндра 2. Палец 7 служит для обеспечения последовательности вертикальных перемещений ползуна и стакана. Палец 13 расположен в винтовом пазу 12 стакана б, закреплен на ползуне 5 и обеспечивает при его перемещении относительно стакана поворот механической руки. В дне стакана б выполнен секторный паз 17, в котором расположен стержень 18, закрепленный на ползуне 5и несущий на свободном конце тягу 19, образующую вместе с механической рукой 8 и опорной пластиной 9 схвата плоскопараллельный механизм (пантограф), позволяющий при повороте механической руки одновременно производить плоскопараллельное перемещение схвата. Схват снабжен -концевым выключателем 20, а электромагниты 10 установлены с возможностью осевого перемещения на подвижных стойках 21 р поджаты пружинаш-Е 22 к опорной пластине 9 и электрически связаны через концевой выключатель ссистемой управления воздухораспределителем силового цилиндра, что позволяет автоматизировать процесс выполняемых операций. Ползун 5 зафиксирован от поворота относительно силового цилиндра 2 шпонкой 23. Фигурный паз 15 ползуна 5 выполнен вертикальным и переходящим в винтовой, а паз 16 силового цилиндра 2 выполнен Г-обраэным. Манипулятор работает следующим образом. В верхнюю полость силового цилинд ра подают сжатьай воздух, при этом шток 4 силового цилиндра 2 перемещает ползун 5 вниз. Палец 13, воздейРтвуя на стенку винтового паза 12, поворачивает стакан б на заданный угол. Вертикальное перемещение стакана при этомне происходит, так как ползун 5 свободно пропускает палец 7 вдоль прямой вертикального участка фигурного паза 15, а стакан б удерживается в пальце 7, зафиксированном от вертикального перемещени в горизонтальной части Г-образного фасонного паза 6 силового цилиндра 2. в конце поворота стакана б с механической рукой 8 ползун 5 воздействует стенкой винтовой части фигурного паза 15 на палец 7 и переводит его из горизонтального участка Г-образного паза 16 силового цилиндра 2 в вертикальный, после чего вращение стакана б прекращается (палец 13 доходит до конца винтового паза 12) и стакан перемещается вниз вместе с ползуном и поворотным кольцом 14, палец 7 которого проскальзывает вдоль вертикального участка паза 16 8момент воздействия стенками паза 15 на палец 7 ползун 5 зафиксирован от поворота относительно силового цилиндра 2 шпонкой 2л. Механическая рука 8 при повороте переносит опорную пластину 9, а тяга 19, иарнирно закрепленная на опорной пластине 9и стойке 21 ползуна 5, позволяет переносить схват плоскопараллельно, так как составляет с опорной пласти:ной 9 и механической рукой 8 пантограф. Стакан б при повороте относительно ползуна 5 свободно пропускает стержень 18 вдоль секторного паза 17 В конце вертикального перемещения стакана 6 с механической рукой 8 электромагниты 10, опираясь на захватываемое изделие, останавливаются, сжимая пружину 22, при этом подвижно установленные стойки 21 выходят над опорной пластиной 9 и нажимают на концевой выключатель 20, включая электромагниты, которые захватывают изделие, и переключая воздухорас пределитель 3 на подачу рабочей среды в нижнюю полость силового цилиндра. Возвращение схвата в исходное положение происходит в обратной последовательности. . Снабжение манипулятора поворотным кольцом и подвижным стаканом, несущим механическую руку, образующую вместе с тягой и схватом плоскопараллельный механизм, и кинематически связанным посредством пальцев и фигурных пазов, выполненных в стенках ползуна, стакана и силового цилиндра с ползуном, позволяет обеспечить последовательность горизонтальных и вертикальных перемещений механической руки и плоскопараллельного перемещения схвата от одного привода. Обеспечение перемещения маиипулятором изделия с тремя степенями свободы от одного привода расширяет технологические возможности и упрощает конструкцию. I Разделение горизонтальных и вертикальных перемещений механической руки манипулятора позволяет повысить точность позиционирования Изделия и облегчает наладку и управление манипулятором. Подвижное расположение электромагнитов схвата и электрическая связь с силовым цилиндром привода манипулятора позволяют автоматизировать цикл работы манипулятора и повысить надежность и диапазон захвата изделия.
8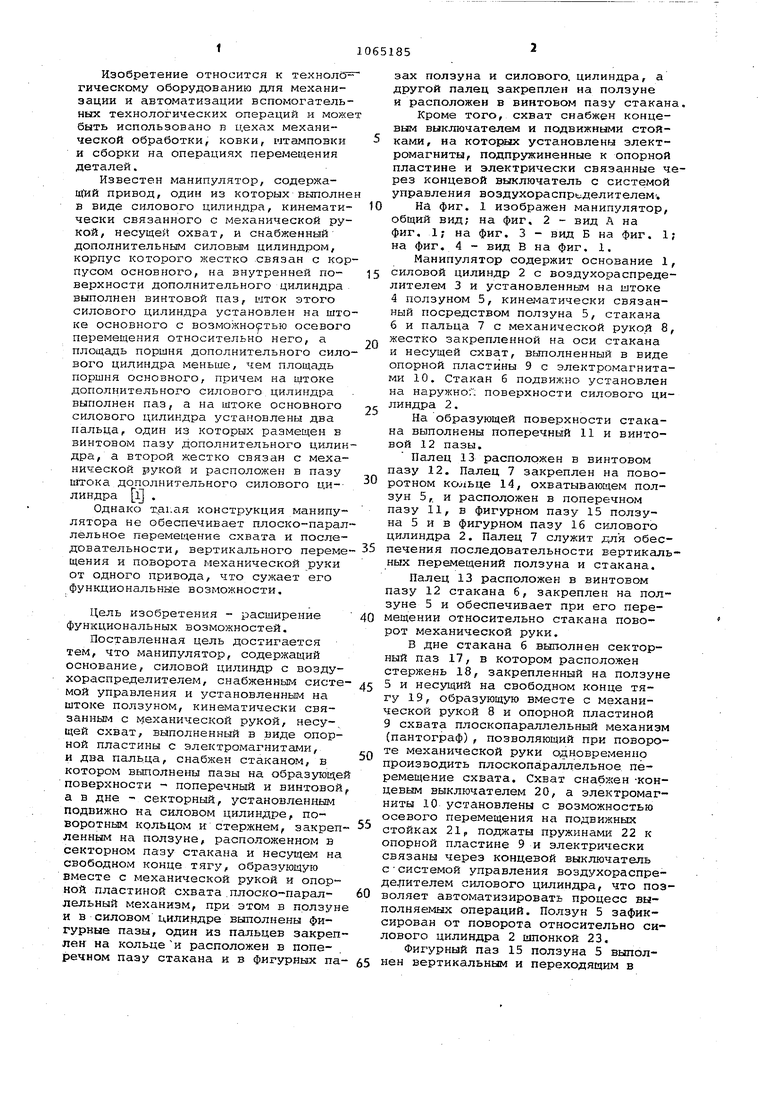

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1009754A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Манипулятор | 1977 |
|
SU707792A1 |
| Манипулятор к штамповочному прессу | 1989 |
|
SU1685582A1 |
| Полуавтомат для сборки секаторов | 1982 |
|
SU1144830A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Манипулятор | 1978 |
|
SU779064A1 |
| Установка для автоматической штамповки | 1985 |
|
SU1238980A1 |

1. МАНШУЛЯТОР, содержащий основание, силовой цилиндр с воздухораспределителем, снабженным системой управления, а также установленньзм на штоке ползуном, кинематически связанным с механической рукой, несущей схват, выполненный в виде опорной пластины с электромагнитами, и два пальца, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен стаканом, в котором на образующей поверхности выполнены пазы - поперечный и винтовой, а в дне - секторный, установленным подвижно на силовом цилиндре, поворотным кольцом и стержнем, закрепленными на ползуне, расположенном в секторном пазу стакана и несущем на свободном конце тягу, образующую вместе с механической рукой и опорной пластиной схва-, та плоско-параллельный механизм, при этом в ползуне и в силовом цилиндре выполнены фигурные пазы, один из пальцев закреплен на кольце и расположен в поперечном пазу стакана и в фигурньах пазах ползуна и силового цилиндра,а другой палец закреплен на ползуне и расположен в винтовом пазу стакана..g 2. Манипулятор по п. 1,о т л ичающийся тем, что схват снабжен концевым выключателем и подвижными стойками, на которых установлены электромагниты, подпружиненные к опорной пластине и электрически свя 2ванные через концевой выключатель с системой управления воздухораспределителем. О) ел 00 СП
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1978 |
|
SU779064A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
