(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Манипулятор | 1982 |
|
SU1065185A1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Устройство для перегрузки изделий с подвесного грузонесущего конвейера | 1975 |
|
SU655610A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Устройство для размещения штучных заготовок | 1987 |
|
SU1473885A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
Изобретение относится к области машиностроения и может быть использовано в промьшшенных работах.
Известны манипуляторы, содержащие поворотную раму со охватом, смонтированную на тележке, перемещаемой с помощью силового цилиндра в направляющих колонны, установленной на подвижной раме 1.
Недостатки этих манипуляторов заключаются в том, что они не обеспечивают захват, транспортировку и установку деталей в глубокую тару без ударов и пережимов, что снижает их технологические возможности.
Целью настоящего изобретения является расширение технологических возможностей манипулятора.
Это достигается благодаря тому, что тележка снабжена профильнЕлм упором и ограничителем поворота руки, на которой также смонтирован упор и сухарь, рука шарнирно соединена с силовым цилиндром посредством обоймы с пазом, в котором размещен указанный сухарь, а внутри руки расположен стакан, снабженным силовым цилиндром, на штоке которого установлено водило, связанное с губками
схвата, причем шток этого силового цилиндра расположен в опоре, укрепленной на схвате.
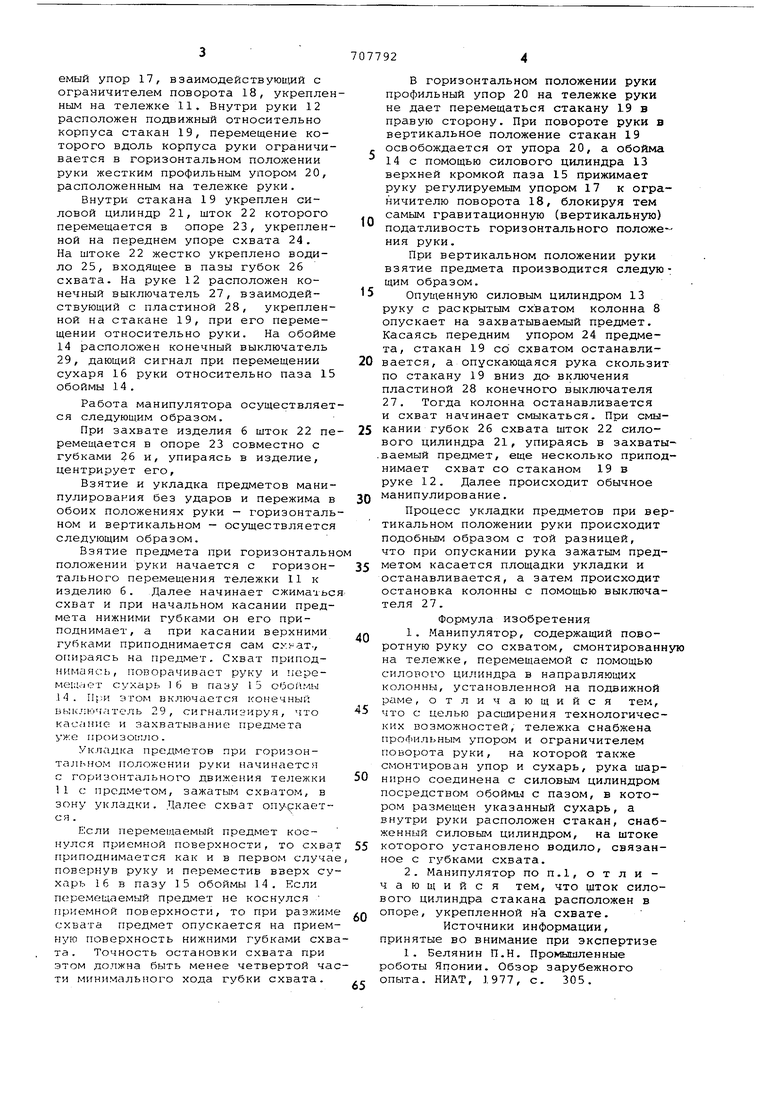
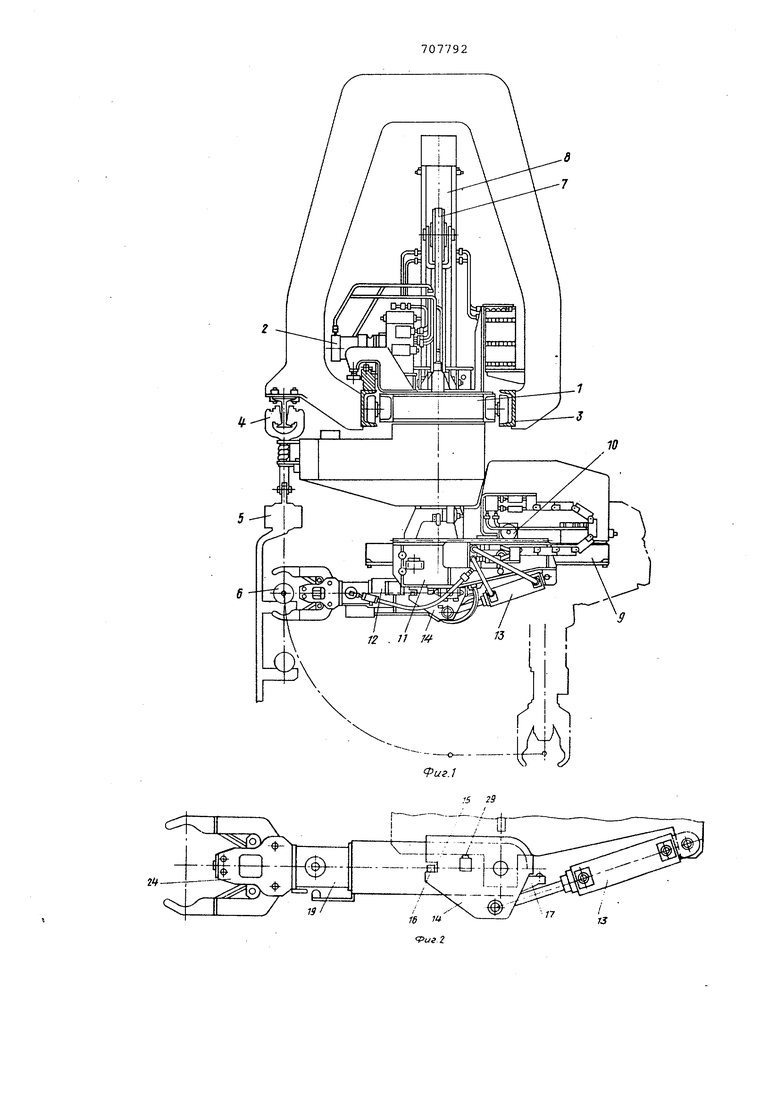
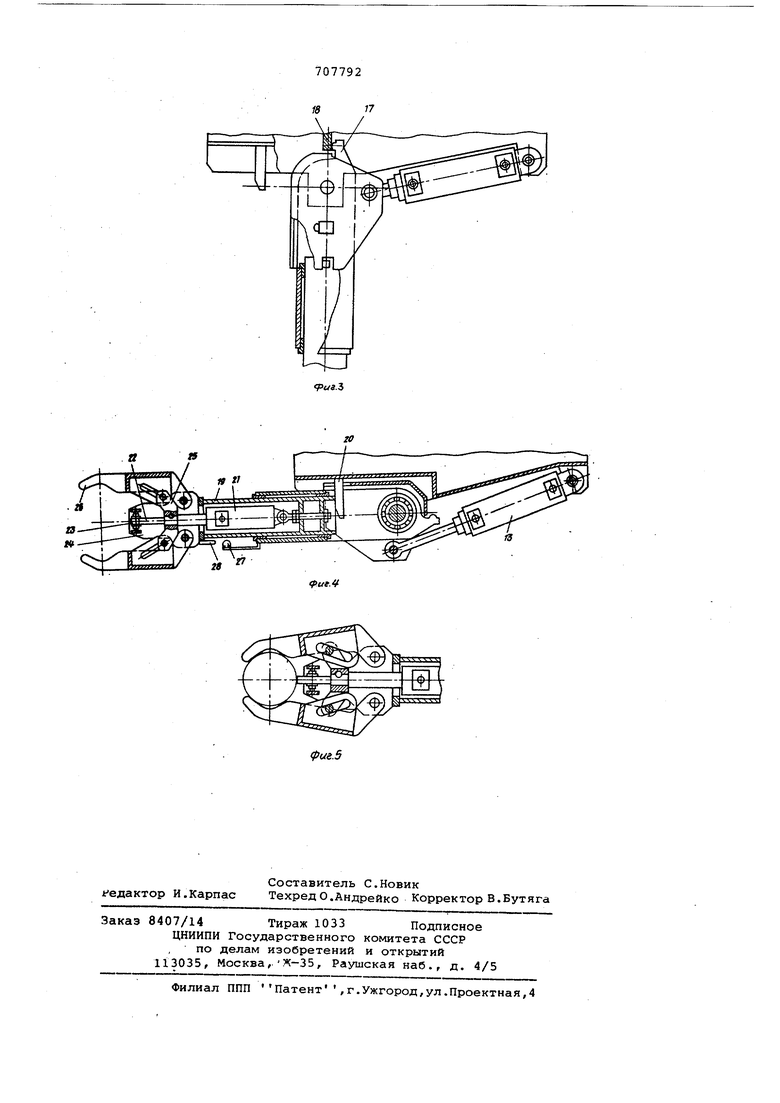
На фиг. 1 изображен общий вид манипулятора; на фиг. 2 - рука манипулятора; на фиг. 3 - узел поворота руки; на фиг. 4 - рука манипулятора/ продольный разрез; на фиг. 5 - схват манипулятора в замкнутом положении.
0
Манипулятор содержит раму 1, на которой укреплен механизм 2 передвижения манипулятора по путям 3, расположенным вдоль конвейера 4, транспортирующего многополочные подвески
5 5 с изделиями 6.
На манипуляторе укреплен механизм 7 подъема колонны 8, на нижнем конце которой укреплена направляющая 9, по которой при помощи ме0ханизма 10 передвижения двигается тележка 11 с рукой 12, имеющей возможность поворачиваться в верт :кальной плоскости при помощи силового цилиндра 13 поворота.
5
Силовой цилиндр 13 поворота связан с рукой 12 через обойму 14, имеющую паз 15, в котором размещен сухарь 16, жестко связанный с рукой 12. Задний конец руки 12 имеет регулиру0
емый упор 17, взаимодействующий с ограничителем поворота 18, укрепленным на тележке 11. Внутри руки 12 расположен подвижный относительно корпуса стакан 19, перемещение которого вдоль корпуса руки ограничивается в горизонтальном положении руки жестким профильным упором 20, расположенным на тележке руки.
Внутри стакана 19 укреплен силовой цилиндр 21, шток 22 которого перемещается в опоре 23, укрепленной на переднем упоре схвата 24. На штоке 22 жестко укреплено водило 25, входящее в пазы губок 26 схвата. На руке 12 расположен конечный выключатель 27, взаимодействующий с пластиной 28, укрепленной на стакане 19, при его перемещении относительно руки. На обойме 14 расположен конечный выключатель 29, дающий сигнал при перемещении сухаря 16 руки относительно паза 15 обоймы 14.
Работа манипулятора осуществляется следующим образом.
При захвате изделия 6 шток 22 перемещается в опоре 23 совместно с губками 26 и, упираясь в изделие, центрирует его.
Взятие и укладка предметов манипулирования без ударов и пережима в обоих положениях руки - горизонтальном и вертикальном - осуществляется следующим образом.
Взятие предмета при горизонтальн положении руки начается с горизонтального перемещения тележки 11 к изделию 6. Далее начинает сжиматьс схват и при начальном касании предмета нижними губками он его приподнимает, а при касании верхними губками приподнимается сам су;--ат., опираясь на предмет. Схват приподнимаясь, поворачивает руку и переметает сухарь 6 в пазу 15 обоймы .1. При этом включается конечный выключатель 29, сигнализируя, что касание и захватывание предмета уже 1 рс изо1г1ло.
Укладка предметов при горизонTajn HOM положении руки начинается с горизонтального движения тележки 1 1 с предметом, зажатыг-1 схватом, в зону укладки. Далее схват опу каетс я .
Если перемещаемый предмет коснулся приемной поверхности, то схва приподнимается как и в первом случа повернув руку и переместив вверх сухарь 16 в пазу 15 обоймы 14. Если псгремещаемый предмет не коснулся приемной поверхности, то при разжим схвата предмет опускается на приемную поверхность нижними губками схвта. Точность остановки схвата при этом должна быть менее четвертой чати минимсэльного хода губки схвата.
В горизонтальном положении руки профильный упор 20 на тележке руки не дает перемещаться стакану 19 в правую сторону. При повороте руки а вертикальное положение стакан 19 освобождается от упора 20, а обойма 14 с помощью силового цилиндра 13 верхней кромкой паза 15 прижимает руку регулируемым упором 1 к ограничителю поворота 18, блокируя тем самым гравитационную (вертикальную) податливость горизонтального положения руки.
При вертикальном положении руки взятие предмета производится следующим образом.
Опущенную силовым цилиндром 13 руку с раскрытым схватом колонна 8 опускает на захватываемый предмет. Касаясь передним упором 24 предмета, стакан 19 со схватом останавливается, а опускающаяся рука скользит по стакану 19 вниз до- включения пластиной 28 конечного выключателя 27. Тогда колонна останавливается и схват начинает смыкаться. При смыкании губок 26 схвата шток 22 силового цилиндра 21, упираясь в захваты.ваемый предмет, еще несколько приподнимает схват со стаканом 19 в руке 12. Далее происходит обычное манипулирование.
Процесс укладки предметов при вертикальном положении руки происходит подобным образом с той разницей, что при опускании рука зажатым предметом касается площадки укладки и останавливается, а затем происходит остановка колонны с помощью выключателя 27.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
иг.1
