Изобретение относится к мавлино I строению, а именно к 1я1ИН1 ляторам.
Известен манипуяятсч с пробаммным управлением, срдерж вцйгй привод, механическую руку со схвДтоМ и тех- , нологическим рабочим фргайом l
Недостатком данного манцпуляторг является невозможность захватывать и переносить несколько захч товок что снижает его производительность.
Цель изобретения повьыение npioизводитедьнбсти.
Указанная цель достигается тем, что манипулятор снабжен толкатепем установленным ссосно схвату, причем схват выполнен в виде стакана, имеющего на торце режущую кршку, а вытёшкиватель установлен этого бтакана и выполнен в виде рычажно храпового механизма.
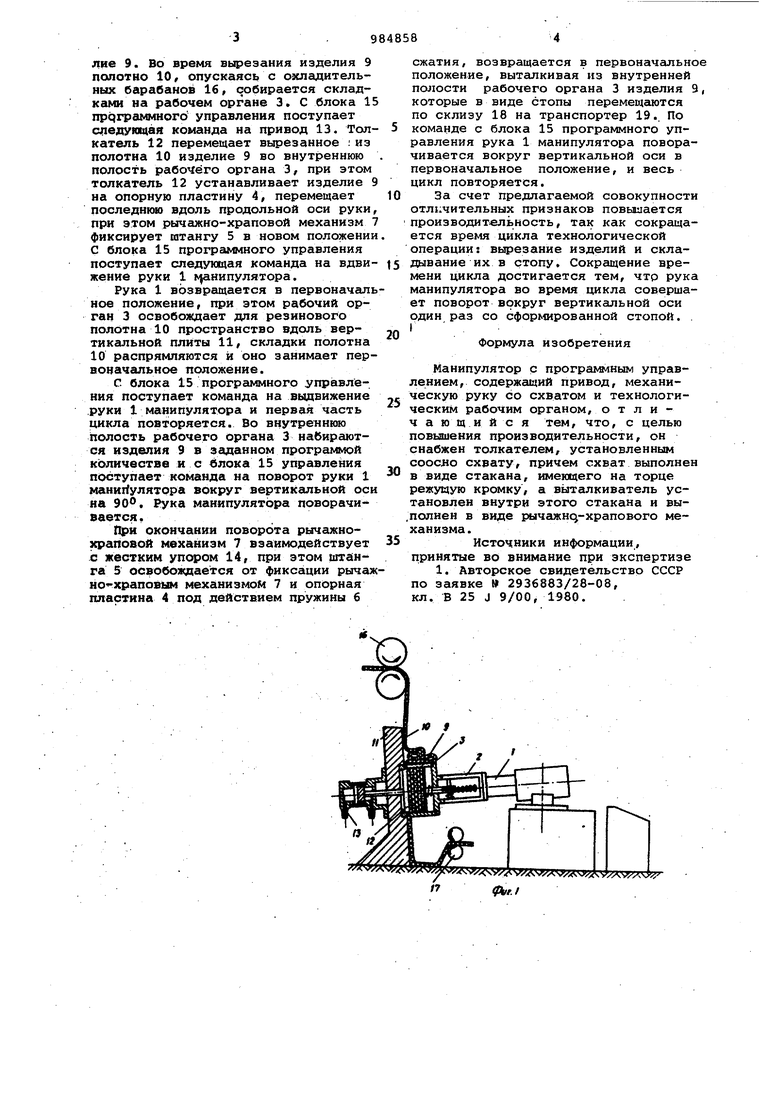
На фиг. 1 изображен предлагаемый манипулятор с технологическим обору-, дрванием на фиг. 2 - то же, вид в плене} на фиг. 3 .схват с рабочим оргаиом} на фиг. 4 - разрез А-А на фиг. 3.
Манипулятор содержит механичес- кую руку 1, на которой жестко закреплен корпус 2 с установленным на нем рабочим органом 3, в котором располояена опо1рна;я пластина 4, соединенная со штангой Ли подпружиненная.пружиной Л сжатия. На-штайге 5 закреплен i рычажно-афапЬвой механизм 7 с упругти звеном 8. Рабочий орган 3 сопря1 ается в момент вьфезания изделия 9 щ резинового полотна 10 с вертикальас плитой 11, содерж19(щ гнездо, «котором ра:сполрж€1и толкатель 12 ооединеитй о приведем 13. Рычажнохраповой механизм 7 контактирует в П1С оф1рта шхашческбй руки 1 манипулятора с жестким упором 14.
Работа 9свх узлов манипулятора и его взаимосвязь с технологичёскнм бборудова Нием осуществляется блоком 1фограмнНО1Ю управления. К технологическому оборудованию относятся охпаднтельные-барабаны 16, ролнкн 17,
20 склиз 18 и транспортер 19.
Манипулятор работает следукщим образом.
Резиновой полотно 10 непрерывно поступает с охладительных барабанов 16 на вертикальную шшту 11. С блока 15 программного управления поступает, команда на выдвижение руки 1 манипулятора. Рабочий оргаи 3 сопрягается с вертикальиой плитой 11 и вырезает из резииового полотна 10 изделие 9. Во время вырезания изделия 9 полотно 10, опускаясь с охладительных барабанов 16, собирается складками на рабрчем органе 3. С блока 1 пррграммного управления поступает следующая команда на привод 13. Толкатель 12 перемещает вырезанное : из полотна 10 изделие 9 во внутреннюю полость рабочего органа 3, при этом толкатель 12 устанавливает изделие на опорную пластину 4, перемещает последнкно вдоль продольной оси руки при этом рычёокно-храповой механизм фиксирует штангу 5 в новом положении С блока 15 программного управления поступает следупщая команда на вдвижение руки 1 г нипулятора. Рука 1 возвращается в первоначаль ное положение, при этом рабочий орган 3 освобождает для резинового полотна 10 пространство вдоль вертикальной плиты 11, складки полотна 10 распрямляются и оно занимает первоначальное положение. С блока 15 программного управления поступает команда на вьшвижение .руки 1 манипулятора и первая часть цикла повторяется. Во внутреннюю полость рабочего органа 3 набираются изделия 9 в заданном программой количестве не блока 15 управления поступает команда на поворот руки 1 манит/улятора вокруг вертикальной оси на 90°, Рука манипулятора поворачивается. При окончании поворота рычажнохрапоаой механизм 7 взаимодействует с жестким упором 14, при этом штанга 5 освобождается от фиксации рычаж но -храпошл4 механизмом 7 и опорная пластина 4 под действием пружины 6 сжатия, возвращается в первоначальное положение, выталкивая из внутренней полости рабочего органа 3 изделия 9, которые в виде стопы перемещаются по склизу 18 на транспортер 19.. По команде с блока 15 программного управления рука 1 манипулятора поворачивается вокруг вертикальной оси в первоначальное положение, и весь цикл повторяется. За счет предлагаемой совокупности отл1;чительных признаков повышается производительность, так как сокращается время цикла технологической операции: вырезание изделий и складывание их в стопу. Сокращение времени цикла достигается тем, чтр рука манипулятора во время цикла совершает поворот вокруг вертикальной оси один раз со сформированной стопой. t . Формула изобретения Манипулятор с програ1Ф1Ным управлением, содержащий привод, механическую руку со схватом и технологическим рабочим органом, отличающийся тем, что, с целью повышения производительности, он снабжен толкателем, установленным соосло схвату, причем схват выполнен в виде стакана, имеющего на торце режущую кромку, а выталкиватель установлен внутри этого стакана и выполнен в виде рычажн -храпового механизма. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке 2936883/28-08, кл. В 25 J 9/00, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Установка для автоматической штамповки | 1985 |
|
SU1238980A1 |
| Манипулятор | 1980 |
|
SU910409A1 |
| Устройство для кассетирования плоских деталей | 1988 |
|
SU1618578A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Устройство для размещения штучных заготовок | 1987 |
|
SU1473885A1 |
| Автоматизированная линия для листовой штамповки | 1985 |
|
SU1319981A1 |
| Устройство для обработки плоских заготовок | 1983 |
|
SU1159696A1 |
| Автоматическая линия горячей штамповки | 1980 |
|
SU940986A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |

