Изобретение относится к гидромашиностроению и может быть использовано в качестве привода промышленных роботов и позиционеров.
Цель изобретения - уменьшение габаритов и увеличение точности порционирова- ния.
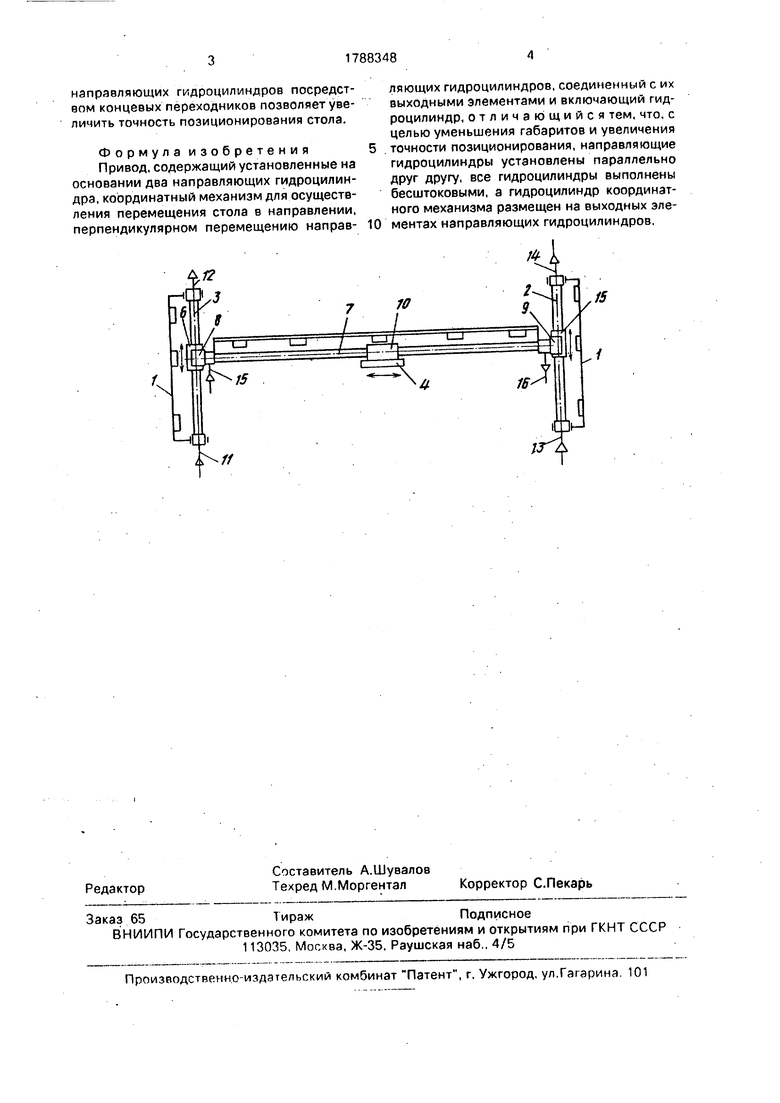
На чертеже представлен привод.
Привод содержит установленные на основании 1 два направляющих гидроцилиндра 2 и 3, координатный механизм для осуществления перемещения стола 4 в направлении, перпендикулярном перемещению направляющих гидроцилиндров 2 и 3, соединенный с их выходными элементами 5 и 6 и включающий гидроцилиндр 7, Направляющие гидроцилиндры 2 и 3 установлены параллельно друг другу, все гидроцилиндры 2, Зи 7 установлены бесштоковыми, а гидроцилиндр 7 координатного механизма разме- щен на выходных элементах 5 и 6 направляющих гидроцилиндров 2 и 3 посредством концевых переходников 8 и 9. Стол 4 установлен на выходном элементе 10 гидроцилиндра 7. Рабочая среда подается в гидроцилиндры через магистрали 11, 12, 13, 14, 15 и 16.
Привод работает следующим образом.
Для осуществления движения по вертикали вверх подают рабочую среду в полости параллельных гидроцилиндров 2 и 3 через магистрали 11 и 13. При этом выходные элементы 5 и 6 гидроцилиндров перемещаются вверх совместно с гидроцилиндром 7. Горизонтальное движение стола 4 достигается путем подачи рабочей среды в полости цилиндра 7 через магистрали 15 или 16 и перемещения выходного элемента 10.
Конструкция привода позволяет за счет применения бесштоковых цилиндров уменьшить габариты, а за счет размещения направляющих гидроцилиндров параллельно и установки гидроцилиндра координатного механизма на выходных элементах
«&
00
00
Сд)
00
направляющих гидроцилиндров посредством концевых переходников позволяет увеличить точность позиционирования стола.
Формула изобретения Привод, содержащий установленные на основании два направляющих гидроцилиндра, координатный механизм для осуществления перемещения стола в направлении, перпендикулярном перемещению направ0
ляющих гидроцилиндров, соединенный с их выходными элементами и включающий гидроцилиндр, отличающийся тем, что, с целью уменьшения габаритов и увеличения .точности позиционирования, направляющие гидроцилиндры установлены параллельно друг другу, все гидроцилиндры выполнены бесштоковыми, а гидроцилиндр координатного механизма размещен на выходных элементах направляющих гидроцилиндров.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПОДГОТОВИТЕЛЬНО-РАСКРОЙНОГО ПРОИЗВОДСТВА ОБУВИ | 2012 |
|
RU2503723C2 |
| Устройство для монтажа радиодеталей на печатную плату | 1985 |
|
SU1412027A1 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| МЕТАЛЛОРЕЖУЩИЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ЗАГРУЗОЧНЫМ УСТРОЙСТВОМ | 2004 |
|
RU2257287C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ ДЕТАЛЕЙ | 1992 |
|
RU2024382C1 |
| СПОСОБ ЛАЗЕРНОЙ РЕЗКИ ХРУПКИХ НЕМЕТАЛЛИЧЕСКИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2528287C2 |
Изобретение относится к гидромашиностроению и м.б. использовано в качестве привода промышленных роботов и позиционеров. Цель изобретения -уменьшение габаритов и увеличение точности позиционирования. Привод содержит установленные на основании 1 два направляющих гидроцилиндра (HQ 2 и 3, координатный механизм (КМ) для осуществления перемещения стола 4 в направлении, перпендикулярном перемещению НГ2 и 3,-соединенный с их выходными. элементами (ВЭ) 5 и 6 и включающий гидроцилиндр. HF2 и 3 установлены параллельно друг другу, все гидроцилиндры 2,3 и 7 выполнены бесштоковыми, а гидроцилиндр 7 КМ размещен на ВЭ 5 и 6. НГ2 и 3. 1 ил.
| Автооператор | 1987 |
|
SU1465249A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
