Изобретение-относится к подъемно- транспортным устройствам, в частности к устройствам для захвата и транспортирования штучных грузов и может быть использовано в строительстве, горном деле, сельском хозяйстве, металлургии, пищевой промышленности и др.
Известно устройство для захвата и транспортирования штучных грузов, содержащее установленные на загрузочно-раз- груЬочнЫХ станциях на пути следования груЖа платформы и подвешенный на канате грузозахватный механизм с зажимными щекам и пружинными элементами для фиксации1 последних.
Недостатком этого устройства является то, т непосредственный контакт грузозахватного механизма с транспортируемым грузом осуществляется путем наезда меха- низ ма на груз, который, воздействуя на пружину грузозахватного механизма, раздвигает щеки, преодолевая сопротивление пружины, а последнее влечет за собой частое повреждение (деформацию) грузов.
Наиболее близким к предлагаемому изобретению является устройство, содержащее установленные на загрузочной и разгрузочной станциях на пути следования груза платформы и подвешенный на канате грузозахватный механизм с зажимными щеками и пружинными элементами для фикса- ции последних, причем устройство снабжено жестко закрепленными на платформах направляющими полуовальной формы с основаниями, направляющие, установленные у загрузочной и разгрузочной станций, обращены одна к другой основаниями.
При работе устройства зажимные щеки грузозахватного механизма раскрываются направляющими полуовальной формы.
XJ
СЛ
Указанное устройство имеет следующие недостатки.
Направляющие раздвигают щеки грузозахватного механизма только на определенные, строго фиксированные расстояния, исключая тем самым захват более крупных грузов, а у грузов меньших габаритов вызывает повреждения, т.к. сойдя с направляющих, щеки, захлопываясь под действием пружины, ударяются по бокам, вызывая повреждение обращенных к щекам сторон груза.
Целью настоящего изобретения является расширение эксплуатационных возможностей устройства и исключение повреждения груза при захвате.
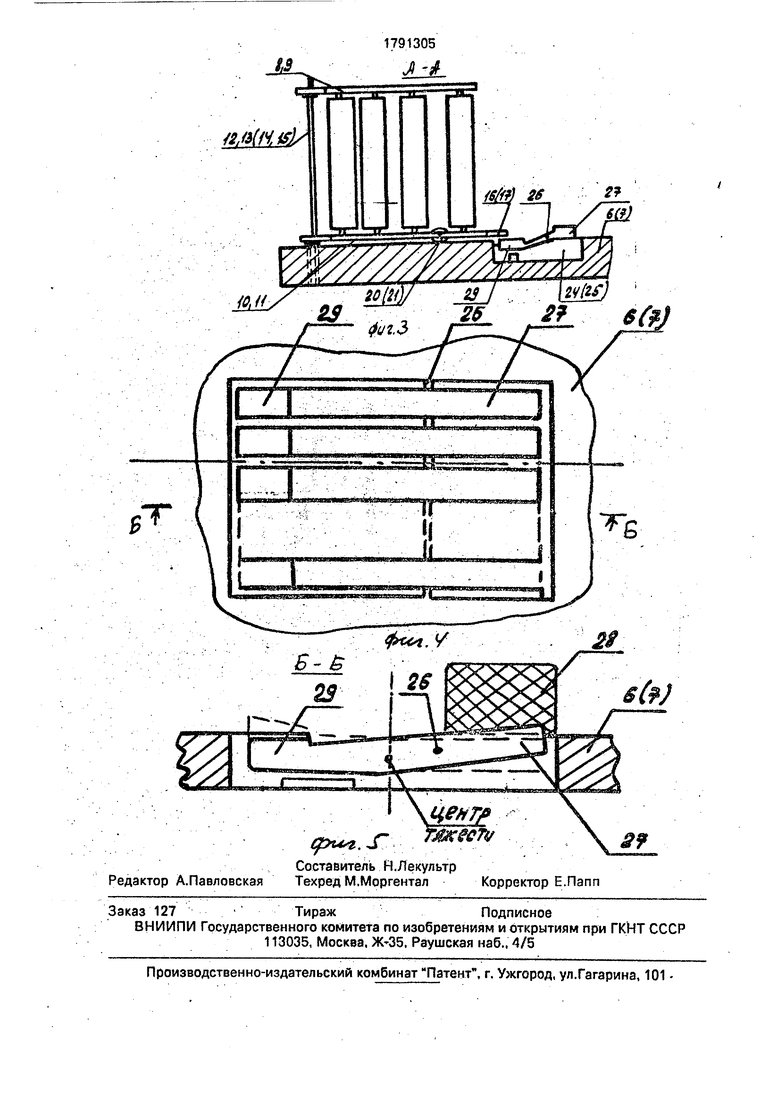
Поставленная цель достигается тем, что в устройстве для захвата и транспортирования штучных грузов, содержащем установленные на загрузочной и разгрузочной станциях на пути следования груза плат- Формы, подвешенный на канате грузозахватный механизм с зажимными щеками и пружинными элементами для фиксации последних и снабженном жестко закрепленными на платформах направляющими полуо вальной формы, обращенными одна к другой основаниями, согласно изобретению, направляющие полуовальной формы с выступами на свободных концах выполнены раздвижными из двух частей, снабженных оттяжными пружинами и имеют механизм автоматической их фиксации, состоящий из рычагов с заслонками, которые Одним концом выступают за края платформы, а другим; на котором находятся заслонки, расположены на ограничителе, размещенном в вырезе платформы, причем общая ось рычагов расположена за центром тяжести заслонок. :;
Направляющие полуовальной формы, выполненные раздвижными из двух частей, дают возможность охватить весь диапазон возможных габаритов грузов. Тем самым расширяются эксплуатационные возможности устройства. При наезде грузозахватного механизма на направляющие полуовальной формы зажимные щеки грузозахватного механизма, преодолев сопротивление пружины, начинают их (направляющие) постепенно сжимать. Когда расстояние между зажимными щеками станет равным размерам груза, перемещение направляющих полуовальной формы и, следовательно, зажимных щек прекращается. Это предохраняет груз от возможных повреждений.
Наличие рычагов с заслонками дает возможность зафиксировать габариты груза при его установке. При установке груза концы рычагов, на которых установлен груз,
погружаются в вырезы платформы, а противоположные концы с выступами заслонками приподнимаются над поверхностью платформы и, являясь препятствием перемещению направляющих полуовальной формы, прекращают их дальнейшее передвижение. При этом расстояние между выступами-заслонками и направляющими и, следовательно, расстояние между зажимными щеками
0 становится равным габаритам груза.
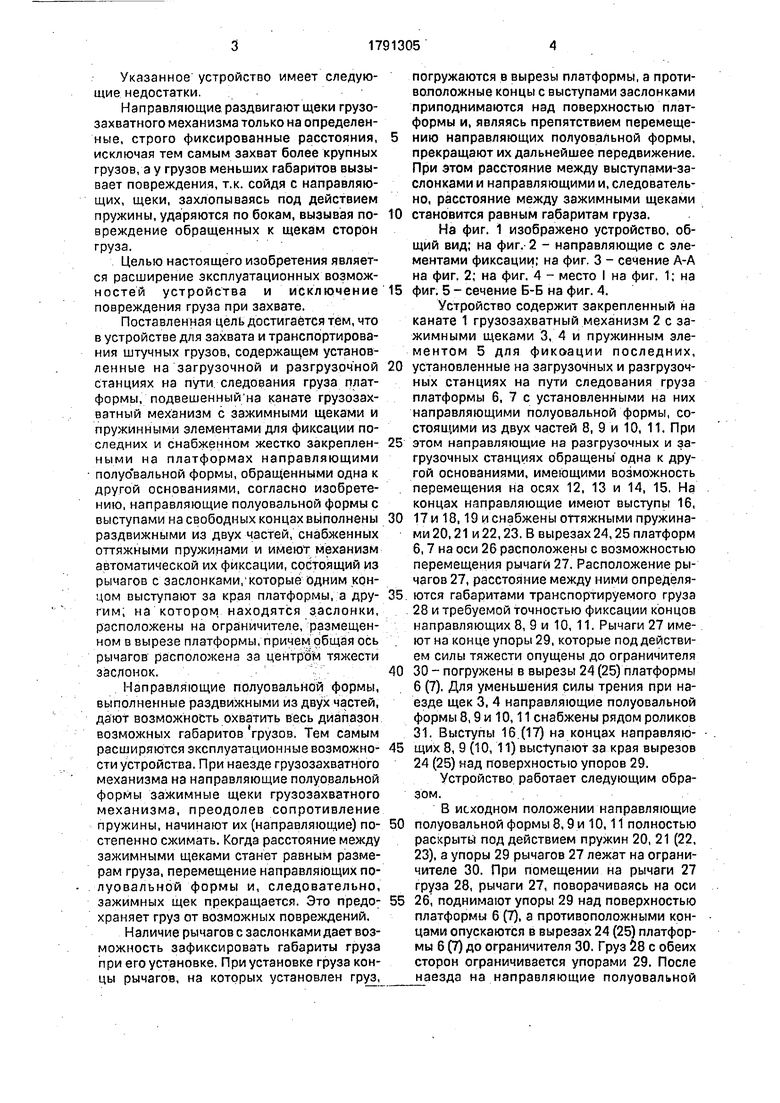
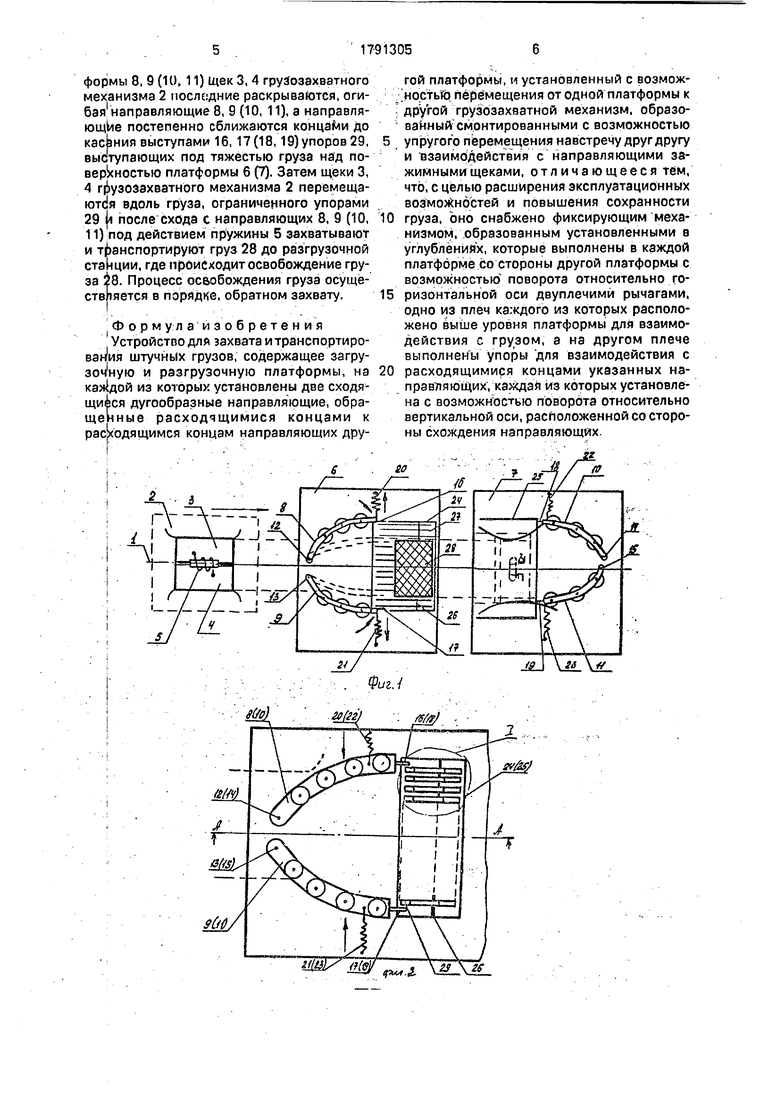
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - направляющие с элементами фиксации; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - место I на фиг. 1; на
5 фиг. 5 - сечение Б-Б на фиг. 4.
Устройство содержит закрепленный на канате 1 грузозахватный механизм 2 с зажимными щеками 3, 4 и пружинным элементом 5 для фикоации последних,
0 установленные на загрузочных и разгрузочных станциях на пути следования груза платформы 6, 7 с установленными на них направляющими полуовальной формы, состоящими из двух частей 8, 9 и 10, 11. При
5 этом направляющие на разгрузочных и загрузочных станциях обращены одна к другой основаниями, имеющими возможность перемещения на осях 12, 13 и 14, 15. На концах направляющие имеют выступы 16,
0 17и 18,19 и снабжены оттяжными пружинами 20,21 и 22, 23. В вырезах 24,25 платформ 6,7 на оси 26 расположены с возможностью перемещения рычаги 27. Расположение рычагов 27, расстояние между ними определя5. ются габаритами транспортируемого груза 28 и требуемой точностью фиксации концов направляющих 8, 9 и 10, 11. Рычаги 27 имеют на конце упоры 29, которые поддействи- ем силы тяжести опущены до ограничителя
0 30 - погружены в вырезы 24 (25) платформы 6 (7). Для уменьшения силы трения при наезде щек 3, 4 направляющие полуовальной формы 8,9 и 10,11 снабжены рядом роликов 31. Выступы 16.(17) на концах направляю5 щих 8, 9 (10, 11) выступают за края вырезов 24 (25) над поверхностью упоров 29.
Устройство работает следующим образом.
В исходном положении направляющие
0 полуовальной формы 8,9 и 10,11 полностью раскрыть под действием пружин 20, 21 (22, 23), а упоры 29 рычагов 27 лежат на ограничителе 30. При помещении на рычаги 27 груза 28, рычаги 27, поворачиваясь на оси
5 26i поднимают упоры 29 над поверхностью платформы 6 (7). а противоположными концами опускаются в вырезах 24 (25) платформы 6 (7) до ограничителя 30. Груз 28 с обеих сторон ограничивается упорами 29. После наезда на направляющие полуовальной
формы 8, 9 (10, 11) Щек 3, 4 грузозахватного механизма 2 последние раскрываются, огибая направляющие 8, 9 (10,11), а направляющие постепенно сближаются концами до касЬния выступами 16, 17(18,19) упоров 29, выступающих под тяжестью груза над по- вер|хностью платформы 6 (7). Затем щеки 3, 4 грузозахватного механизма 2 перемещаются вдоль груза, ограниченного упорами 29 и после схода с направляющих 8, 9 (10, 11) под действием пружины 5 захватывают и транспортируют груз 28 до разгрузочной станции, где происходит освобождение груза 8. Процесс освобождения груза осуществляется в порядке, обратном захвату.
ф о р м у л а и з о б р е т е н и я Устройство ДЛА захвата итранспортиро- ван ия штучных грузов, содержащее загругой платформы, и установленный с возмож; ностьШ перемещения от одной платформы к I другой грузозахватной механизм, образо- ванный- смонтированными с возможностью
5 упругого перемещения навстречу друг другу и -взаимодействия с направляющими зажимными щеками, отличающееся тем, что, с целью расширения эксплуатационных возможностей и повышения сохранности
10 груза, оно снабжено фиксирующим механизмом, .образованным установленными в углублениях, которые выполнены в каждой платформе со стороны другой платформы с возможностью поворота относительно го15 ризонтальной оси двуплечимй рычагами, одно из плеч ка:кдого из которых расположено выше уровня платформы для взаимодействия с грузом, а на другом плече выполнены упоры для взаимодействия с
ванмя штучных грузов, содержащее загру-ьыпилпспо. y,,wi «,. „„-.....-.--зонную и разгрузочную платформы, на20 расходящимися концами указанных на0 к f/ ,„.;..,.« -iravsnae пга «-ЛТППМУ УГТЭНОВЛекаждой из которых установлены две сходящийся дугообразные направляющие, обращенные расходящимися концами к рас-хОдящимся концам направляющих друпраеляющих, каждая из которых установлена с возможностью поворота относительно вертикальной оси, расположенной со стороны схождения направляющих.
гой платформы, и установленный с возмож ностьШ перемещения от одной платформы к I другой грузозахватной механизм, образо- ванный- смонтированными с возможностью
упругого перемещения навстречу друг другу и -взаимодействия с направляющими зажимными щеками, отличающееся тем, что, с целью расширения эксплуатационных возможностей и повышения сохранности
груза, оно снабжено фиксирующим механизмом, .образованным установленными в углублениях, которые выполнены в каждой платформе со стороны другой платформы с возможностью поворота относительно горизонтальной оси двуплечимй рычагами, одно из плеч ка:кдого из которых расположено выше уровня платформы для взаимодействия с грузом, а на другом плече выполнены упоры для взаимодействия с
ьыпилпспо. y,,wi «,. „„-.....-.--расходящимися концами указанных ,„.;..,.« -iravsnae пга «-ЛТППМУ УГТЭНОВЛепраеляющих, каждая из которых установлена с возможностью поворота относительно вертикальной оси, расположенной со стороны схождения направляющих.
,f(.
20+
фиг.З
JL 25
2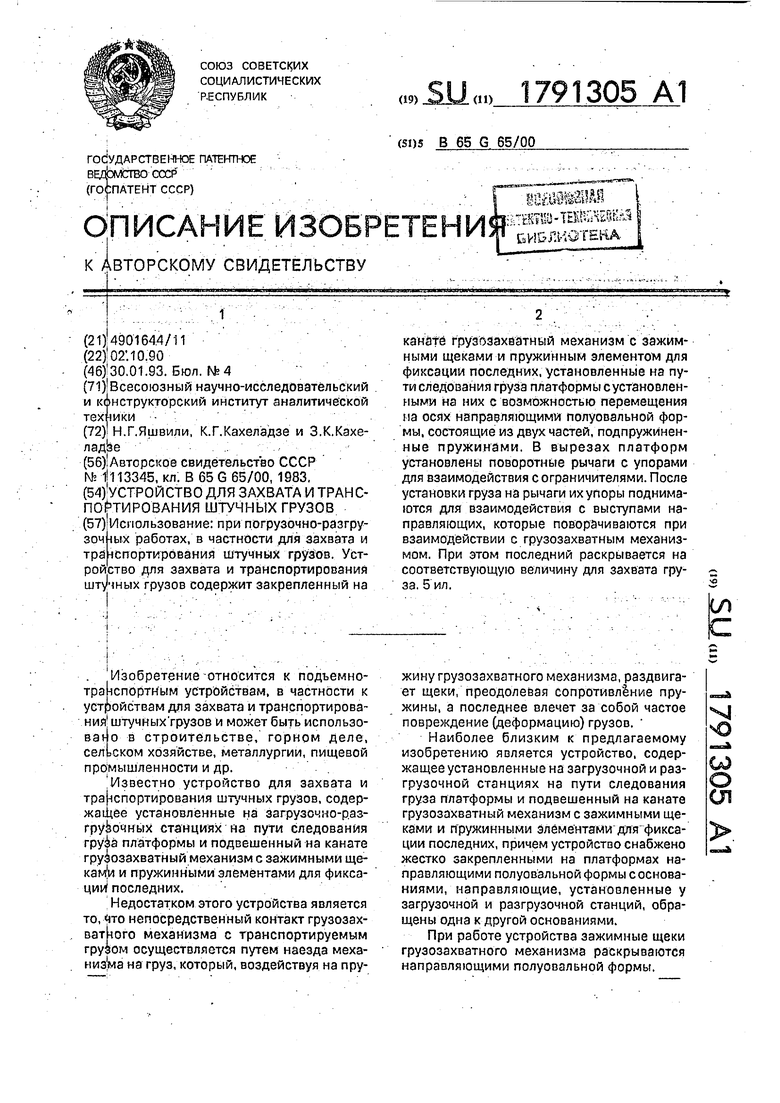
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1980 |
|
SU931653A1 |
| Пакетоформирующая машина | 1974 |
|
SU645914A1 |
| Грузозахватное устройство | 1980 |
|
SU912623A1 |
| Грузозахватное устройство | 1990 |
|
SU1744036A1 |
| Клещевой захват | 1977 |
|
SU703467A1 |
| Крановый полуавтоматический захват | 1990 |
|
SU1785991A1 |
| Устройство для загрузки и разгрузки стеллажей | 1981 |
|
SU977335A1 |
| Захват-кантователь к погрузчику | 1990 |
|
SU1754639A1 |
| Грузозахватное устройство | 1983 |
|
SU1169928A1 |
3041 Использование: при погрузочно-разгру- шх работах, в частности для захвата и транспортирования штучных грузов. Устройство для захвата и транспортирования штучных грузов содержит закрепленный на канате грузозахватный механизм с зажимными щеками и пружинным элементом для фиксации последних, установленные на пути следования груза платформы с установленными на них с возможностью перемещения на осях направляющими полуовальной формы, состоящие из двух частей, подпружинен- ные пружинами. В вырезах платформ установлены поворотные рычаги с упорами для взаимодействия с ограничителями. После установки груза на рычаги их упоры поднимаются для взаимодействия с выступами направляющих, которые поворачиваются при взаимодействии с грузозахватным механизмом. При этом последний раскрывается на соответствующую величину для захвата груза. 5 ил.
.J
Составитель Н.Лекультр Редактор А.Павловская Техред М.МоргенталКорректор Е.Папп
Заказ 127 Тираж Подписное
ВНИИПИ Государственного KoMHTeta по изобретениям и открытиям при ГКЙТ СССР 113035, Москва. Ж-35. Раушская наб., 4/5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | |||
