Фиг.1
Изобретение относится к области машиностроения и предназначено для автоматической ориентации и выгрузки деталей,
Известно устройство для ориентирования и сборки деталей,которое содержит кор- пус с ориентатором, выполненным в виде втулки, расположенной внутри корпуса с возможностью вращения посредством пневмовихревого механизма, причем на внутренней поверхности корпуса и на на- ружной поверхности втулки выполнена резьба одинакового шага и направления.
Известное устройство имеет недостаток, так как не обеспечивает ориентацию и сборку деталей, у которых несовпадение осей вращения превышает допустимый зазор между втулкой и корпусом.
Известно наиболее близкое по технической сущности и, достигаемому результату .устройство ориентирования деталей, кото- рое содержит корпус, ориёнтатор , выполненный, в виде втулки, расположенной внутри корпуса с возможностью вращения и колебания посредством пневмовихревогомеханизма и образующей кольцевую щель между нижней торцовой поверхностью ориентатора и дном корпуса, при этом на дне корпуса выполнен трафарет для выгрузки деталей,/а на внутренней-поверхности ориентатора в зоне.выгрузки де- талей дополнительно введен по крайней мере один угюр. ; -
Известное устройство имеет недостаток - низкую надежность ориентирования, т.к. после совпадения нижних 2-3-х дета- лей с трафаретом и их удаления, последующие: нижние детали в стопе имеют возможность опуститься на упор. При этом Произойдет перекос стопы деталей и закли- . нивание их в трафарете.
Кроме того, в случае, когда необходимо подавать сориентированные детали в ложемент устройства удаления, например, в ло- .жемент шиберного устройства, при несовпадении осей ложемента и трафарета на размер, превышающий допустимый зазор между ориентатором и корпусом, выгрузка деталей не произойдет..
Цель изобретения - повышение надежности ориентирования деталей,
Эта цель достигается тем, что в устройстве для ориентирования деталей, содержащем корпус, ориёнтатор, выполненный в виде втулки, расположенной внутри корпуса с возможностью вращения и колебания посредством пневмовихреаого механизма и образующей кольцевую щель между нижней торцевой поверхностью ориентатора и дном корпуса, захват, расположенный в полости втулки, выполнен в виде кольца и рас--
положен во втулке с зазором и с возможностью касания дна корпуса, в котором расположен трафарет для выгрузки деталей.
Кроме того, с целью пбвышения надеж- ности выгрузки деталей в ложемент шибера, захват расположен во втулке с возможностью касания нижней торцовой поверхностью верхней плоскости шибера.
Вследствие этого, закрученный в пнев- мрвихрёвом механизме поток воздуха истекает по кольцевой щели и воздействует на боковую поверхность захвата, приводя ее в колебательное и вращательное движение. При этом амплитуда колебаний захвата определяет поле поиска деталью.трафарета и складывается из размеров зазора между ориентатором и корпусом и между ориентатором и захватом. Поэтому в случае ориентирования деталей по трафарету, выполненному в корпусе для совпадения детали с трафаретом, достаточным условием является выполнение зазора между захватом и ориентатором равным полю допуска на деталь, а в случае ориентирования деталей по ложементу, выполненному в шибере, для совпадения детали q ложементом достаточным условием является выполнение зазора между захватом и ориентатором равным сумме размеров поля допуска детали и допуска на максимальное отклонение осей корпуса и ложемента.
Кроме того, выполнение захвата в виде кольца и отсутствие на нем упоров исключает возможность перекоса ориентируемых деталей в стопе и тем самым повышается надежность ориентирования,
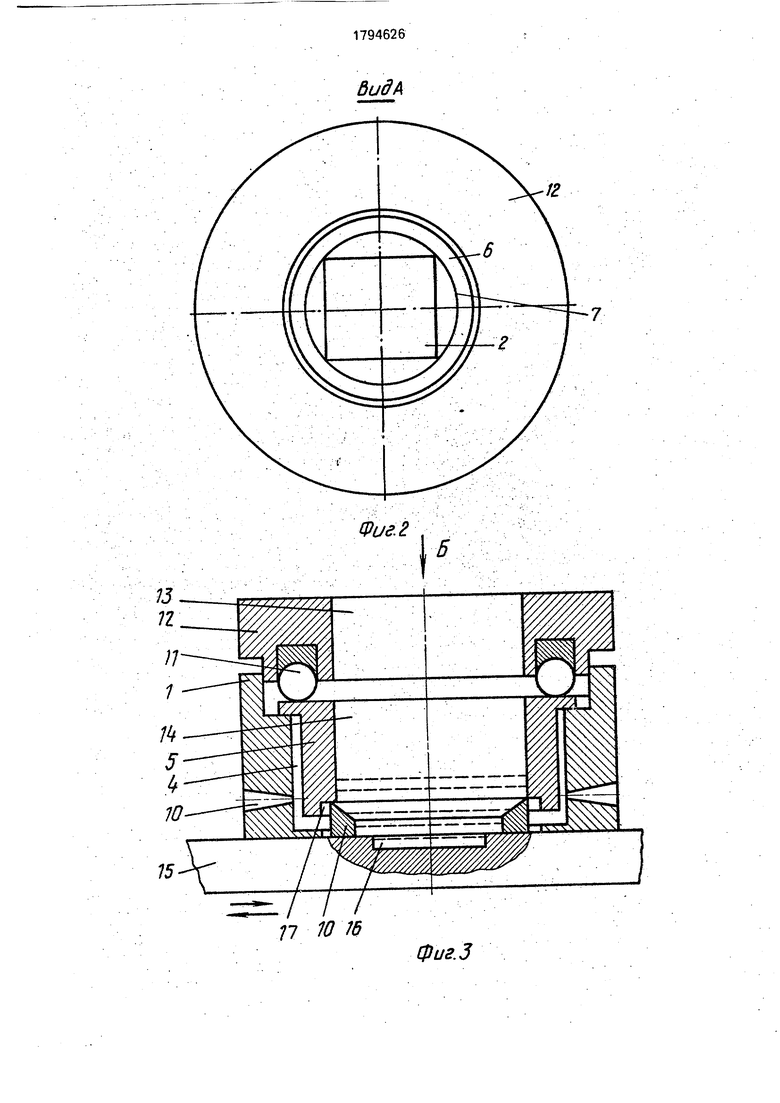
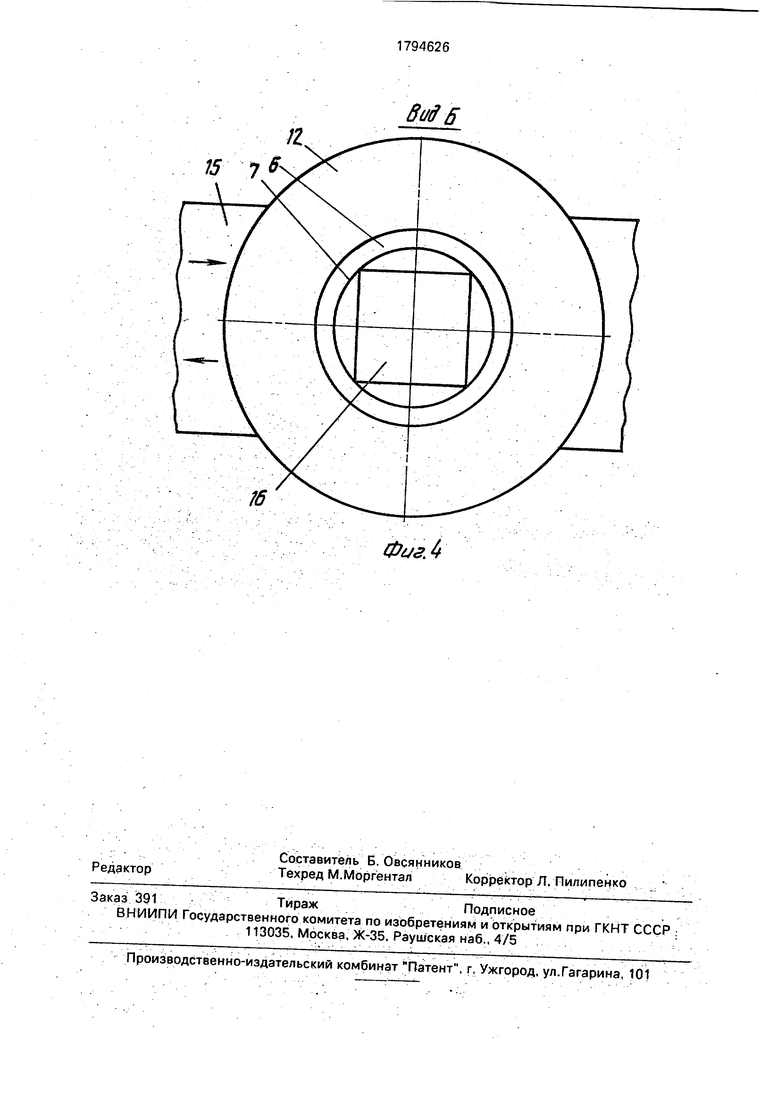
На фиг.1 изображено схематически устройство ориентирования деталей по трафарету, расположенному в корпусе (стационарно); на фиг.2 - вид А на фиг. 1; на фиг.З - устройство для ориентирования деталей по ложементу, расположенному в шибере; на фиг,4 - вид Б на фйг.З. ..
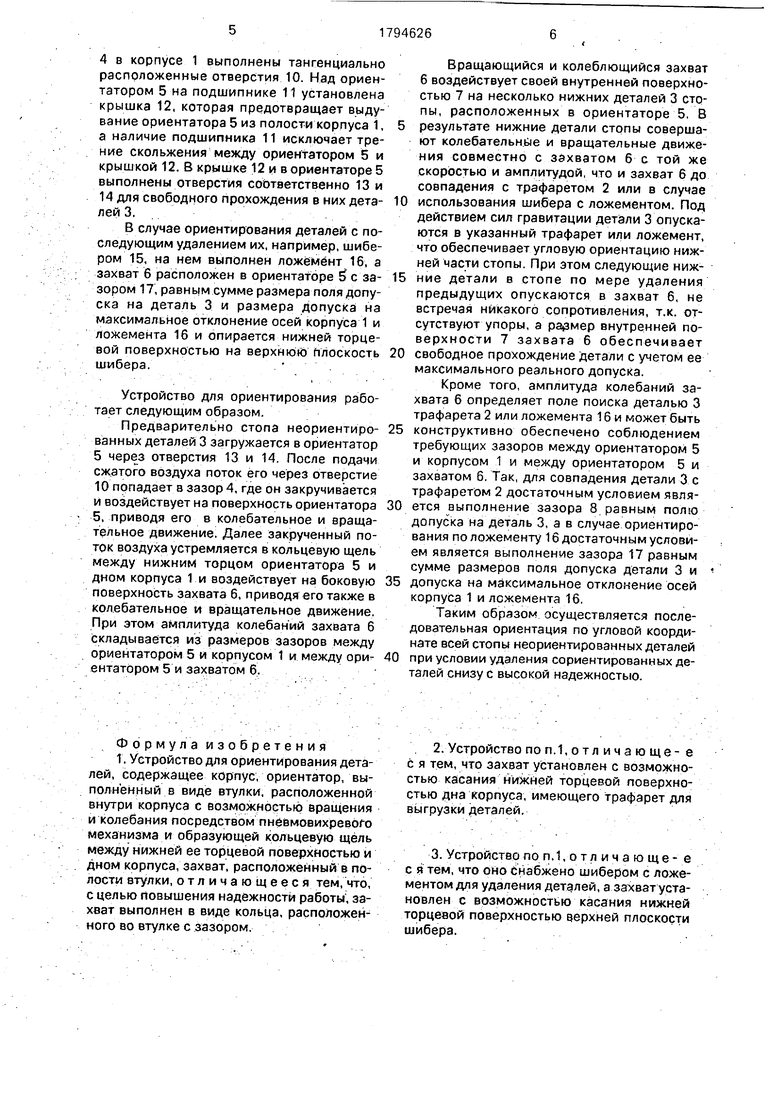
Устройство ориентирования содержит корпус 1, в котором в центральной части выполнен трафарет 2 для выгрузки деталей 3. В полости корпуса 1 с зазором 4 расположен ориёнтатор 5, выполненный в виде втулки,верхняя часть которой опирается буртиком на корпус 1. В нижней части втулки в пазе свободно расположен захват 6, выполненный в виде кольца, размер внутренней поверхности 7 которого соответствует диаметру описанной окружности вокруг внешнего контура детали Зс учетом ее максимального допуска, причем захват 6 расположен в ориентаторе 5с зазором 8, равным полю допуска на деталь 3 и касается нижней торцевой поверхностью дна 9 корпуса 1, Для подвода сжатого воздуха в зазор
4 в корпусе 1 выполнены тангенциально расположенные отверстия 10. Над ориентатором 5 на подшипнике 11 установлена крышка 12, которая предотвращает выдувание ориентатора 5 из полости корпуса 1, а наличие подшипника 11 исключает трение скольжения между ориентатором 5 и крышкой 12. В крышке 12 и в ориентаторе 5 выполнены отверстия соответственно 13 и 14 для свободного прохождения в них дета- лей 3.
В случае ориентирования деталей с последующим удалением их, например, шибером 15, на нем выполнен ложемент 16, а захват 6 расположен в ориентаторе э с за- зором 17, равным сумме размера поля допуска на деталь 3 и размера допуска на максимальное отклонение осей корпуса 1 и ложемента 16 и опирается нижней торцевой поверхностью на верхнюю плоскость шибера.
Устройство для ориентирования работает следующим образом.
Предварительно стопа неориентиро- ванных деталей 3 загружается в ориентатор 5 через отверстия 13 и 14. После подачи сжатого воздуха поток его через отверстие 10 попадает в зазор 4, где он закручивается и воздействует на поверхность ориентатора 5, приводя его в колебательное и вращательное движение Далее закрученный поток воздуха устремляется в кольцевую щель между нижним торцом ориентатора 5 и дном корпуса 1 и воздействует на боковую поверхность захвата 6, приводя его также в колебательное и вращательное движение. При этом амплитуда колебаний захвата 6 складывается из размеров зазоров между ориентатором 5 и корпусом 1 и между ори- ентатОром 5 и захватом б.
Вращающийся и колеблющийся захват 6 воздействует своей внутренней поверхностью 7 на несколько нижних деталей 3 стопы, расположенных в ориентаторе 5. В результате нижние детали стопы совершают колебательные и вращательные движения совместно с захватом 6 с той же скоростью и амплитудой, что и захват 6 до совпадения с трафаретом 2 или в случае использования шибера с ложементом. Под действием сил гравитации детали 3 опускаются в указанный трафарет или ложемент, что обеспечивает угловую ориентацию нижней части стопы. При этом следующие нижние детали в стопе по мере удаления предыдущих опускаются в захват б, не встречая никакого сопротивления, т.к. отсутствуют упоры, а размер внутренней поверхности 7 захвата 6 обеспечивает свободное прохождение детали с учетом ее максимального реального допуска.
Кроме того, амплитуда колебаний захвата 6 определяет поле поиска деталью 3 трафарета 2 или ложемента 16 и может быть конструктивно обеспечено соблюдением требующих зазоров между ориентатором 5 и корпусом 1 и между ориентатором 5 и захватом 6. Так, для совпадения детали 3 с трафаретом 2 достаточным условием является выполнение зазора 8 равным полю допуска на деталь 3, а в случае ориентирования по ложементу 16 достаточным условием является выполнение зазора 17 равным сумме размеров поля допуска детали 3 и допуска на максимальное отклонение осей корпуса 1 и ложемента 16.
Таким образом осуществляется последовательная ориентация по угловой координате всей стопы неориентированных деталей при условии удаления сориентированных деталей снизу с высокой надежностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ориентирования деталей | 1986 |
|
SU1369122A1 |
| Устройство ориентирования деталей | 1986 |
|
SU1356358A1 |
| Устройство для ориентирования и сборки деталей | 1983 |
|
SU1168374A1 |
| Устройство для подачи пружинных колец | 1987 |
|
SU1465254A1 |
| Устройство для вторичного ориентирования деталей | 1989 |
|
SU1791096A1 |
| УСТРОЙСТВО ПОДАЧИ ДЕТАЛЕЙ | 2013 |
|
RU2533980C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ И СБОРКИ ДЕТАЛЕЙ В АВТОМАТИЗИРОВАННОМ ПРОИЗВОДСТВЕ | 2001 |
|
RU2204469C2 |
| Роторное питающее устройство | 1985 |
|
SU1266706A1 |
| Устройство для автоматической сборки деталей | 1981 |
|
SU994198A1 |
| Станок для правки пластин | 1989 |
|
SU1706761A1 |
Использование: в машиностроении для автоматической ориентации и выгрузки деталей. Сущность изобретения: устройство содержит корпус 1, в котором выполнены тангенциально отверстия 10. В полости корпуса 1 расположен ориентатор 5 в виде втулки, в нижней части которой расположен захват 6, выполненный в виде кольца. Захват б расположен в ориентаторе 5 с зазором 8 над трафаретом 2, выполненным в корпусе 1, или ложементом, выполненным в шибере. При подаче сжатого воздуха через отверстия 10 в корпусе 1 закрученный поток воздуха воздействует на ориентатор 5 и захват б, который начинает колебаться и вращаться совместно с нижней в стопе деталью до момента совпадения с трафаретом 2 или ложементом в шибере. При совпадении контура детали и трафарета (ложемента) деталь ориентируется. 2 з.п.ф-лы, 4 ил.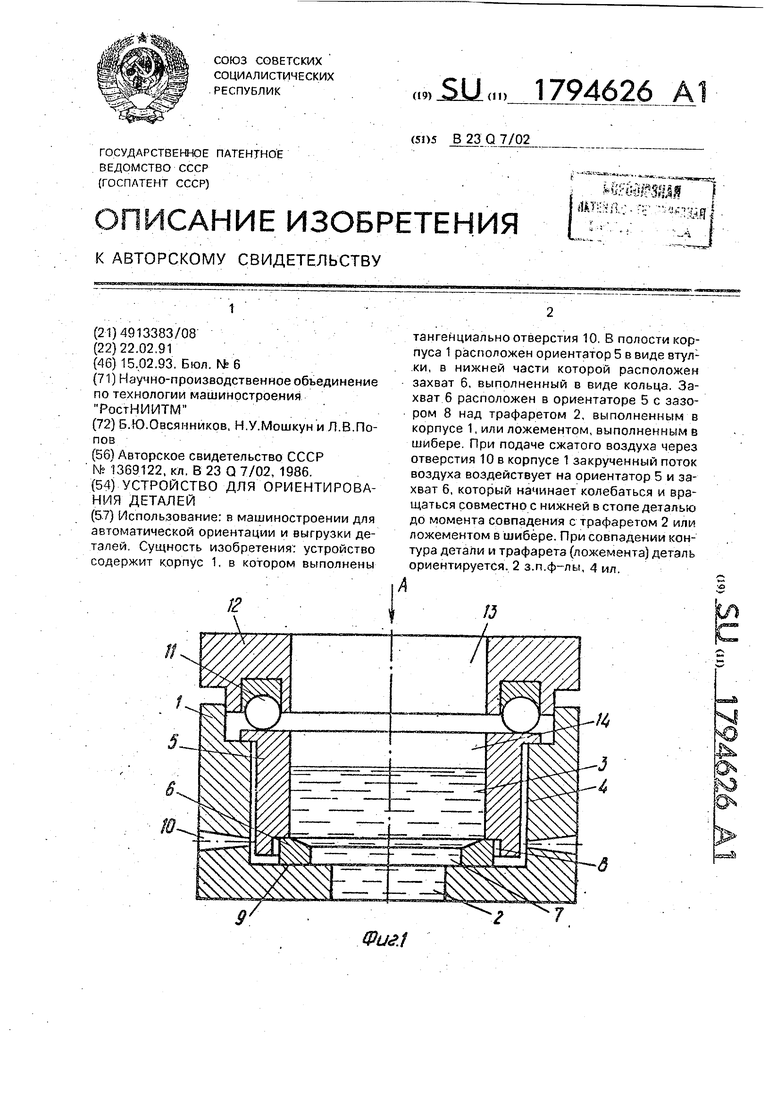
Форму л а изобретения
Т. Устройство для ориентирования деталей, содержащее корпус, ориентатор, выполненный в виде втулки, расположенной внутри корпуса с возможностью вращения и колебания посредством пневмовихревого механизма и образующей кольцевую щель между нижней ее торцевой поверхностью и дном корпуса, захват, расположенный в полости втулки, отличающееся тем, что, с целью повышения надежности работы, захват выполнен в виде кольца, расположенного во втулке с зазором.
ВидА
фиг.З
Фиг.Ь
| Устройство ориентирования деталей | 1986 |
|
SU1369122A1 |
