со с: со
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ориентирования деталей | 1986 |
|
SU1356358A1 |
| Устройство для ориентирования деталей | 1991 |
|
SU1794626A1 |
| Вибробункер | 1987 |
|
SU1522562A1 |
| Устройство для ориентирования и сборки деталей | 1983 |
|
SU1168374A1 |
| Устройство для вторичного ориентирования деталей | 1989 |
|
SU1791096A1 |
| Устройство для подачи пружинных колец | 1987 |
|
SU1465254A1 |
| Загрузочно-ориентирующее устройство | 1990 |
|
SU1815131A1 |
| РОТОРНАЯ МАШИНА СБОРКИ | 1992 |
|
RU2014195C1 |
| Роторный автомат питания | 1978 |
|
SU779010A1 |
| Устройство для ориентированной подачи деталей | 1977 |
|
SU631306A1 |
Изобретение относится к области wauiH- ностроения и предназначено для автоматической ориентации и выгрузки деталей. Целью изобретения является расширение технологических возможностей устройства за счет обеспечения угловой ориентации деталей из навала. При подаче сжатого воздуха поток его закручивается в кольцевой камере 7 и ускоряется в кольцевой щели 8. Врашаюшийся поток воздуха, истекающий из кольцевой шели 8. взаимодействует с ориентатором 5. приводя его во вращение. Вращающийся ориентатор 5 с упорами 10 взаимодействует с двумя-тремя нижними деталями, расположенными навалом внутри ориентатора 5. поворачивает их до совпадения с гнездом 4. Под действием сил гравитации нижние детали опускаются в гнездо 4. чем обеспечивается ориентации деталей по угловой координате. 3 ил.
hO Ю
Изобретение относится к области машиностроения и предназначено для автоматн- ческой ориентации и выгрузки деталей.
Целью изобретения является расширение технологических возможностей устройства за счет обеспечения угловой ориентации деталей из навала.
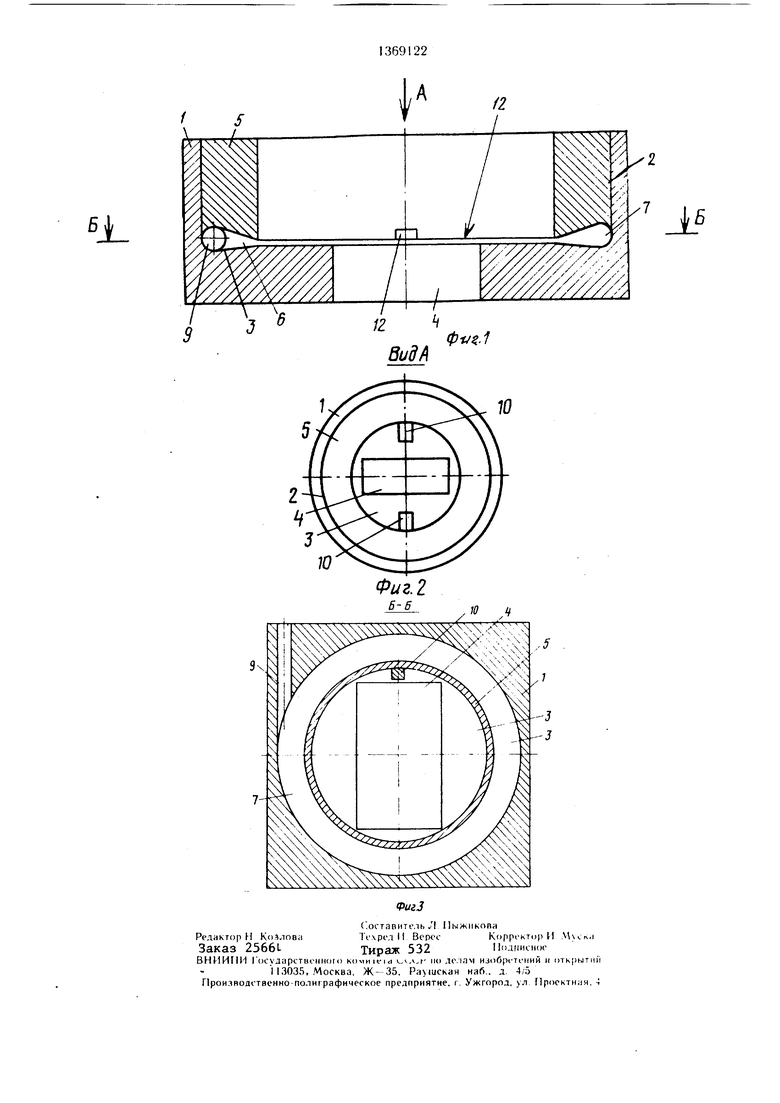
На фиг. 1 показан обший вид устройства; на фиг. 2 - пид А на фиг. 1; на фиг. 3 - разрез Б Б на фиг. 1
Устройство содержит корпус 1 с расточкой 2 и дном 3, в котором в центральной части выполнено гнездо 4 для выгрузки деталей (на чертеже детали не показаны). В расточке 2 установлен ориентатор 5, выполненный в виде втулки с возможностью вращения посредством пневмовихревого механизма. Между торцовой поверхностью 6 ориентатора и дном 3 расположена кольцевая камера 7, выполненная с возможностью образования кольцевой щели 8. Для подвода сжатого воздуха в кольцевую камеру 7 в корпусе выполнено тангенциально расположенное к последней отверстие 9. Увеличение числа симметрично расположенных отверстий 9 обеспечивает самоцентри- рованне ориентатора 5. На внутренней поверхности ориентатора 5 в зоне выгрузки деталей дополнительно введен упор 10, установленный с возможностью захвата двух- трех деталей, расположенных в нижней части навала деталей.
Кольцевая щель 8 предназначена для преобразования потенциальной энергии ежа того воздуха в кинематическую энергию потока воздуха Кольцевая камера 7 предназначена для закручивания потока воздуха, поступающего чере) отверстие 9 и ускоряемого в кольцевой щели 8 Дно 3 расточки 2 может быть плоским, однако выпуклый профиль дна 3 уменьшает момент сопротивления повороту детали, что обуславливает меньщнй расход сжатого воздуха. Размещение на ориентаторе двух диаметрально расположенных упоров 10 исключает влияние реально существующих допусков на детали и зазоры и повышает надежность ориентирования.
Для повышения вращающего момента ориентатора 5 на его торцовой поверхности 6 могут быть вы1юлнены лопатки, которые увеличивают силовое воздействие потока воздуха на ориентатор Гт, так как взаимодействие через треиие : аменяется динамическим давлением потока воздуха на лопатки.
Для удаления ориентированных деталей из устройства снизу может быть использован, например, шиберный питатель.
Устройство работает следующим образом.
Предварительно стопа неориентированных деталей размещается в ориентаторе 5. После подачи сжатого воздуха поток его через отверстие 9 попадает в кольцевую камеру 7, где закручивается, и через кольцевую щель 8 в виде вращающегося вокруг вертикальной оси потока истекает во внутрь ориентатора 5. Вращающийся поток воздуха оказывает силовое воздействие на ориентатор 5, вращая его, и одновременно на стопу неориентированных деталей. Вращающийся ориентатор 5 упором 10 воздействует на несколько нижних деталей стопы, расположенный в ориентаторе 5. В результате нижние детали стопы поворачиваются вокруг своей оси до совпадения с гнездом 4 и под действием сил гравитации опускаются в указанное гнездо, что обеспечивает угловую ориентацию нижней части стопы. Непрерывно вращающийся ориентатор 5 и поток воздуха постоянно поворачивают нижние детали и стопе, что обуславливает
опускание последующих нижних деталей стопы сразу же после удаления сориентированных деталей из гнезда 4 снизу.
Таким образом осуществляется последовательная ориентация по угловой координа- те всей стопы неориентированных деталей при условии удаления сориентированных деталей из устройства снизу, например, шиберным питателем.
Формула изобретения
Устройство ориентирования деталей, содержащее корпус, ориентатор, выполненный в виде втулки, расположенной внутри корпуса с возможностью вращения посредством пневмовихревого механизма с кольцевой камерой и тангенциально расположенными соплами, при этом на дне корпуса выполнено гнездо для выгрузки деталей, отличающееся тем, что, с целью расширения технологических возможностей устройства, кольцевая камера выполнена с возможностью образования кольцевой щели между нижней торцовой поверхностью ориентатора и дном корпуса, при этом на внутренней поверхности ориентатора в зоне выгрузки деталей дополнительно введен по крайней мере один упор.
ю
Фиг. 2
6-в
JO ц
.-5
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
