Изобретение относится к железнодорожному транспорту и может быть использовано для контроля состояния изолированных участков рельсовой линии.
Известен способ контроля свободного состояния рельсовой линии, при котором на питающем конце в рельсовую линию подается управляющий сигнал, а на приемном конце сигнал детектируется, интегрируется, сравнивается с допустимым и по превышению над последним определяется свободность рельсовой линии.
Известен также способ контроля свободного состояния рельсовой линии, при котором на питающем конце в рельсовую линию подается импульсный сигнал, г на приемном конце сигнал детектируется и интегрируется, полученная амплитуда сигнала во время импульса сравнивается с первым пороговым значением, а полученная амплитуда сигнала во время интервала сравнивается со вторым пороговым значением. Рельсовая линия свободна, если сигнал в
импульсе превышает первое пороговое значение и сигнал в интервале не превышает второе пороговое значение.
Недостатком способов является возможность ошибочного контроля состояния рельсовой линии под воздействием помех на сигнал приемного конца рельсовой линии.
Наиболее близким к предлагаемому решению является способ, по которому запоминаются сигналы на приемном конце рельсовой линии в рассматриваемый и предшествующий дискретные моменты времени, определяется абсолютное значение приращения амплитуды сигнала и его полярность. Полученные параметры приращения используются для оценки состояния рельсовой линии следующим образом. В случае превышения абсолютным значением приращения допустимого значения при положительной полярности приращения, состояние рельсовой цепи определяется, как свободное. Пр,и превышении абсолютным
ел
с
х| Ю VI
Os
OJ
значением приращения допустимого значения и отрицательной полярности приращения, состояние рельсовой цепи определяется как занятое.
Недостатком способа является возмож- ность ошибочного контроля состояния рельсовой линии под воздействием помех на сигнал приемного конца рельсовой линии, например, воздействие помехи может привести к увеличению приращения при очередной оценке состояния рельсовой ли: нии, а затем приращение может оставаться ниже допустимого значения и при последующих оценках ошибка не будет выявлена.
Целью изобретения является повыше- ние точности контроля состояния рельсовой линии.
Поставленная цель достигается тем, что в известном способе контроля состояния рельсовой линии, заключающемся в подаче в рельсовую линию с питающего конца импульсного контрольного сигнала, на приемном конце формируют импульсный управляющий сигнал, запоминают амплитуды проинтегрированного контрольного сиг- нала во время импульса и интервала управляющего сигнала, определяют разность амплитуд проинтегрированного контрольного сигнала во время импульса и во время интервала управляющего сигнала, и сравнивают ее с допустимым значением и при превышении над последним фиксируют свободность рельсовой линии.
Заявляемый способ, в отличие от аналогов и прототипа, позволяет полностью (при непрерывной помехе) или частично (при Импульсной помехе) исключить влияние помехи на правильность оценки состояния рельсовой линии. Это объясняется следующим. Выходной сигнал рельсовой линии во время посылки управляющего импульса с питающего конца представляет собой совокупность полезного сигнала и помехи. Выходной сигнал рельсовой линии во время интервала между управляющими импульса- ми представляет собой сигнал помехи, присутствующей в этот момент в рельсовой линии. Последующее вычитание второго сигнала из первого позволяет полностью или частично скомпенсировать сигнал поме- хи в получаемой разности, по которой в дальнейшем производится определение состояния рельсовой линии.
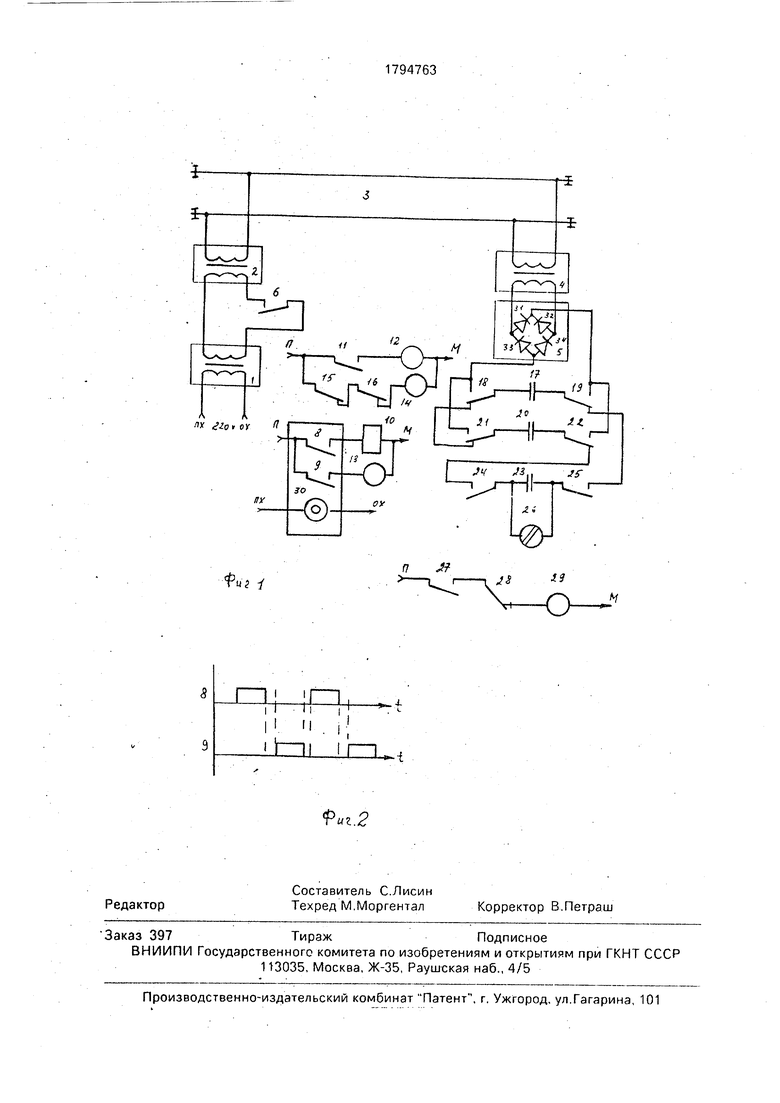
На фиг. 1 показан пример реализации предлагаемо способа контроля рельсовой линии; на фиЬ. 2 - временная диаграмма работы кодового путевого трансмиттера.
На чертежах приняты следующие обозначения: источник питаний 1; рельсовая линия 3; согласующий блок 2 для согласования
источника питания с рельсовой линией 3 и согласующий блок 4 для согласования аппаратуры приемного конца с рельсовой линией; детектор 5; кодовый путевой трансмиттер; трансмиттерное реле 10; электромагнитные нейтральные реле 12, 13, 14, 26; конденсаторы 17, 20, 23; комбинированное электромагнитное реле 26, имеющее поляризованный и нейтральный якорь; 6, 11 - контактные группы реле 10; 15, 18, 19 - контактные группы реле 13; 27 - контактная группа нейтрального якоря комбинированного реле 26; 28 - контактная группа поляризованного якоря комбинированного реле 26.
Источник питания 1 содержит понижающий трансформатор. Согласующие блоки 2 и 4 содержат согласующие трансформаторы. Детектор 5 состоит из четырех диодов 31, 32, 33, 34, включенных по мостовой схеме. Кодовый путевой трансмиттер 7 состоит из двигателя 30 и двух коммутирующих контактов 8 и 9, замыкающихся так, как показано на фиг. 2.
В исходном состоянии электромагнитные реле 10, 12, 13, 14, 26,29 находятся без тока, управляющий сигнал в рельсовую ли- нию 3 не подается, так как контакт 6 транс- миттерного реле 10 разомкнут, емкости 17, 20, 23 разряжены, реле 26 находится в обесточенном состоянии, реле 29 также без тока, так как разомкнут контакт 27 реле 26. Переменное и постоянное напряжения в схему не подаются.
Запуск устройства в работу осуществляется следующим образом. Вначале подается переменное напряжение 220 В, в результате чего разгоняется двигатель кодового путевого трансмиттера 7 и коммутирующие контакты 8 и 9 начинают работать в соответствии с временной диаграммой, показанной на фиг. 2. После этого в схему подается постоянное напряжение. В момент замыкания контакта 8 возбуждается трансмиттерное реле 10 и замыкает свой общий и фронтовой контакт контактной группы 6 и группы 11, в результате чего в рельсовую линию 3 от питающего устройства 1 через согласующее устройство 2 подается управляющий сигнал. В этот же момент времени возбуждается реле 12, притягивает свой якорь, в результате чего .замыкаются общие и фронтовые контакты контактных групп 18 и 19, и подключают емкость 17 к выходу детектора 5. Управляющий сигнал, пройдя по рельсовой линии 3, через согласующее устройство 4, детектор 5 и контакты 18 и 19, поступит на обкладки емкости 17, которая будет интегрировать и накапливать поступающий выходной сигнал до тех пор
пока не разомкнется контакт 8, который бесточит реле 10, которое отпустит свой якорь и разомкнутся контакты 6 и 11. В результате этого управляющий сигнал перестанет подаваться в рельсовую линию, что будет соответствовать интервалу между управляющими импульсами (интервалу управляющего сигнала) и емкость 17 будет отключена от выхода детектора 5. Затем замкнется контакт 9 (см. временную диаграмму на фиг. 2), который создаст цепь возбуждения реле 13, реле притянет свой якорь, замкнутся общие и фронтовые контакты его контактных групп 21 и 22, которыми емкость 20 будет подключена к выходу етектора 5. Емкость начнет интегрировать и накапливать сигнал, поступающий из рельсовой линии 3 через согласующее устройство 4 и детектор 5, то есть помеху, присутствующую в рельсовой линии Следует отметить, что величины емкостей 17 и 20 равны между собой, длительность импульсов и интервалов управляющего сигнала также одинакова, между импульсами и интервалами управляющего сигнала имеется временной интервал (см. фиг. 2), чтобы исключить влияние переходных процессов на величины накапливаемых емкостями сигналов. По окончании замыкания контакта 9 обесточивается реле 13, отпускает свой якорь, размыкаются фронтовые и замыкаются общие и тыловые контакты контактных групп 21,22 и 16 реле 13. Емкость 20 отключается от выхода детектора 5. Возбуждается реле 14, притягивает свой якорь и замыкает контакты 24 и 25, в результате чего емкости 17 и 20 оказываются включенными последовательно с емкостью 23, на которой формируется разность сигналов, накопленных емкостями 17 и 20. Если в результате вычитания сигналов на емкости 23 формируется сигнал, равный или выше порога срабатывания реле 26, то оно возбуждается, притягивает свой нейтральный якорь и замыкает контакт 27. При этом, если полярность протекающего по обмотке реле 27 тока прямая, то замыкается контакт 28 и возбуждается
реле 26, фиксирующее свободное и исправное состояние рельсовой линии.
Применение предлагаемого способа контроля состояния рельсовой линии обеспечивает по сравнению с существующими
следующие преимущества:
повышается точность контроля состояния рельсовой линии за счет полной или частичной компенсации влияния помех на правильность оценки состояния рельсовой
линии;
повышается безопасность движения поездов, вследствие уменьшения вероятности определения ложной свободности состояния рельсовой линии;
сокращаются задержки поездов, вследствие уменьшения вероятности определения ложной занятости состояния рельсовой линии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля схода изолирующих стыков при кодовой автоблокировке | 1990 |
|
SU1729875A1 |
| Приемник импульсной рельсовой цепи | 1984 |
|
SU1224204A1 |
| Кодовая рельсовая цепь переменного тока | 1988 |
|
SU1613374A1 |
| УСТРОЙСТВО ЗАЩИТЫ РЕЛЬСОВЫХ ЦЕПЕЙ | 1999 |
|
RU2173275C2 |
| Фазочувствительная рельсовая цепь | 1990 |
|
SU1794758A1 |
| Устройство контроля перегона | 2024 |
|
RU2829877C1 |
| Устройство для контроля схода изолирующих стыков кодовой автоблокировки | 1987 |
|
SU1428646A1 |
| Приемник для рельсовой цепи | 1989 |
|
SU1740225A1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413646C1 |
| Устройство путевой блокировки с точечным контролем свободности блок-участков | 1982 |
|
SU1096151A1 |
Изобретение относится к железнодорожному транспорту и может быть использовано для контроля состояния участков рельсовой линии. Сущность изобретения: на питающем конце в рельсовую линию подают импульсный контрольный сигнал, а на приемном конце сигнал детектируют и интегрируют, формируют импульсный управляющий сигнал, запоминают амплитуды проинтегрированного контрольного сигнала, определяют разность амплитуд проинтегрированного сигнала во время импульса и во время интервала управляющего сигнала, и сравнивают ее с допустимым значением и при превышении над последним фиксируют свободность рельсовой линии. 2 ил.
Формула изобретения Способ контроля свободного состояния рельсовой линии, при котором на питающем конце в рельсовую линию подают импульсный контрольный сигнал, а на приемном конце сигнал детектируют и интегрируют, отличающийся тем, что, с целью повышения точности, на приемном конце формируют импульсный управляющий сигнал, запоминают амплитуды проинтегрированного контрольного сигнала во время импульса и интервала управляющего сигнала, определяют разность амплитуд проинтегрированного сигнала во время импульса и во время интервала управляющего сигнала и сравнивают ее с допустимым значением и при превышении над последним фиксируют свободность рельсовой линии.
| Способ контроля свободного состояния рельсовой линии | 1987 |
|
SU1491761A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
