VJ
ю 4 VI
Os Os
Изобретение относится к автоматике и телемеханике на транспорте и может быть использовано для автоматического опознавания типа железнодорожного вагона;
Известно устройство для опознавания типа вагона, содержащее датчик межвагонного пространства, подключенный ко входу элемента задержки, одному из входов элемента запрет и управляющему входу дешифратора, выходы которого подключены к регистру типа вагона, а входы - к выходам реверсивного счетчика, вход сброс которого соединен с выходом элемента задержки и датчик прохождения колесной пары, подключенный к входу элемента запрет,
Недостатком этого устройства являеть- ся низкая достоверность опознавания в слу- чае маневрирования вагона в зоне опознавания.
Наиболее близким по технической сущности к заявленному устройству является выбранное в качестве прототипа устройство для опознавания типа вагона, содержащее датчики прохождения оси, соединенные с первыми элементами.И и одними триггерами, которые подключены к первым элементам И и дешифратору, соединенному с соответствующими датчиками прохождения оси элементами И, с другими триггерами и через элемент ИЛИ - с триггерами, счетчики, подключенные к соответствующим парам вторых элементов И.
Недостатком известного устройства является следующее.
При движении по участку опознавания шестиосного вагона посредством датчиков прохождения оси. элементов И, триггеров, дешифратора, счетчиков и элемента ИЛИ осуществляется физическое выделение вагона, т.е. формирования выходного сигнала, устройства соответствии с типом проходящего данный участок вагона и направлением его движения. Причем, основным признаком, характеризующим тип опознаваемого вагона, в данном случае является одновременное срабатывание двух датчиков прохождения оси, расположенных на расстоянии друг от друга равным расстоянию между соседними колесными парами трехосной вагонной тележки (модель 18- 102). Однако отечественной промышленностью выпускается несколько модификаций трехосных вагонных данной модели, у которых расстояния между соседними колесными парами может быть равно как 1750 мм, так и 1700 мм, а также и 1500 мм. Поэтому при перемещении по участку опознавания трехосной вагонной тележки, расстояние между соседними колесными парами не равно расстоянию между двумя датчиками
0
5
прохождения оси. Одновременное срабатывание которых обуславливает формирование основного признака, характеризующего нахождение на участке опознавания трехосной вагонной тележки, выходной сигнал известного устройства не соответствует типу вагона, прошедшего участок опознавания. Таким образом, недостатком известного устройства для.опознавания типа вагона является невысокая достоверность опознавания при прохождении участка опознавания шестиосным вагоном.
Цель изобретения - повышение достоверности.
На чертеже представлена блок-схема устройства для опознавания типа вагона.
Устройство для опознавания типа вагона содержит преобразователь 1 кода, соединенный с датчиками 2,3,4 прохождения оси
0 и через сумматор 5 с дешифратором 6, который подключен к датчикам 2,4, триггерам 7,8,9 элементу 10 ИЛИ, соединенному с триггером 7, элемент 11 ИЛИ, подключенный к сумматору 5, дешифратору 6. тригге5 рам 7,8,9 и дешифратору 12, который соединен с сумматором 13 и элементом 14 ИЛИ, подключенный к сумматору 13, соединенному с дешифратором 6.
Устройство работает следующим образом.
До прихода на участок опознавания транспортного средства все блоки заявляемого устройства находятся в исходном состоянии.
При перемещении по участку опознавания четырехосного грузового вагона в направлении от датчика 2 к датчику 4 без изменения направления движения колесные пары первой 2-осной вагонной тележки поочередно проходят зоны действия датчиков 2,3,4 прохождения оси обуславливает следующую очередность появлений на выходах преобразователя кода кодовых комбинаций: 100-010-101-010-001, которой
5 соответствует такая последовательность выходных кодов преобразователя 1: 10000- 01000-10101-01000-00001. Выходные сигналы преобразователя 1 поступают на информационные входы регистра 5, кото0 рый осуществляет выполнение поразрядной операции сложения по модулю 2 поступающей на его информационные входы кодовой комбинации с кодом числа, раннее записанного в регистр 5. Поэтому
5 вышеприведенной последовательности срабатываний датчиков 2,3 и 4 соответствует следующая очередность кодовых чисел, последовательно формируемых в результате операции сложения по модулю 2 в регистре 5:10000-11000-01101-00101-00100.
0
5
0
Таким образом, при нахождении первой колесной пары 2-осной тел.ежки в зоне действия датчика 2 на входах дешифратора 6 устанавливает кодовая комбинация 0110000000. В момент выхода первой колесной пары из зоны срабатывания датчика 2 на входах дешифратора б присутствует кодовое сообщение 0010000000, которому соответствует появление сигнала на первом выходе дешифратора 6. Данный сигнал по- .ступает на вход установки в 1 триггера 8, который из исходного состояния О переходит в состояние 1, что соответствует появлению сигнала 1 на первом входе дешифратора 6. Поэтому при последующем движении транспортного средства по участку опознавания на входах дешифратора 6 поочередно устанавливаются следующие комбинации: 1010000000-1011000000- 110110110-1001101000- 10001.01000- 1000100100; причем, пять первых кодовых комбинаций данной последовательности не формируют выходного сигнала дешифратора 6, в то время, как шестая кодовая комбинация 1000100100, устанавливающая на входах дешифратора 6 в момент прохождения второй колесной парой по ходу движения 2-осной вагонной тележки датчика 4, то есть в момент выхода данной тележки с участка опознавания, обуславливает появление сигнала на четвертом выходе дешифратора 6. Сигнал с четвертого выхода дешифратора б поступает на первый информационный вход сумматора 13, что соответствует появлению кодовой комбинации 100000000000 на информационных входах сумматора 13, которая суммируется с исходным кодом 000000000000, в результате в сумматоре 13 формируется число 100000000000. Одновременно сигнал с четвертого выхода дешифратора б через элемент 11. ИЛИ подключается на синхронизирующий вход дешифратора 12 и на сбросовые входы сумматора 5 и триггеров 7,8 и 9. По заднему фронту данного сигнала сумматор 5 и триггеры 7,8 и 9 возвращаются в исходное состояние. Таким образом после прохождения первой вагонной тележки 4-осногно вагона участка опознавания сумматор 13 будет находиться в состоянии 100000000000, а остальные блоки устройства - в исходном состоянии.
Во время прохождения в первоначальном направлении второй вагонной тележкой данного вагона участка опознавания устройство работает аналогичным образом. И в этом случае в момент ухода последней колесной пары второй вагонной тележки с участка опознавания на информационных входах сумматора 13 устанавливается кодовой сообщение 100000000000, которое суммируется с ранее записанным в сумматор 13 кодом 100000000000. В результате выполнения операции суммирования в сумматоре 5 13 формируется кодовое число 010000000000, которому соответствует появление сигнала на первом выходе дешифратора 12, поступающего на выход А устройства и через элемент 14 ИЛИ на сбро0 совый вход сумматора 13.
Таким образом, формирование сигнала на первом выходе дешифратора 12 а, следовательно, и на выходе А устройства соответствует прохождению участка опознавания
5 4-осным вагоном в направлении от датчика 2 к датчику 4. Причем, после появления сигнала на выходе А устройство возвращается в исходное состояние.
При подходе к участку опознавания 40 осного грузового вагона со стороны датчика 4 с последующим движением данного вагона по участку опознавания без смены направления движения колесные пары первой 2-осной тележки поочередно проходят зоны
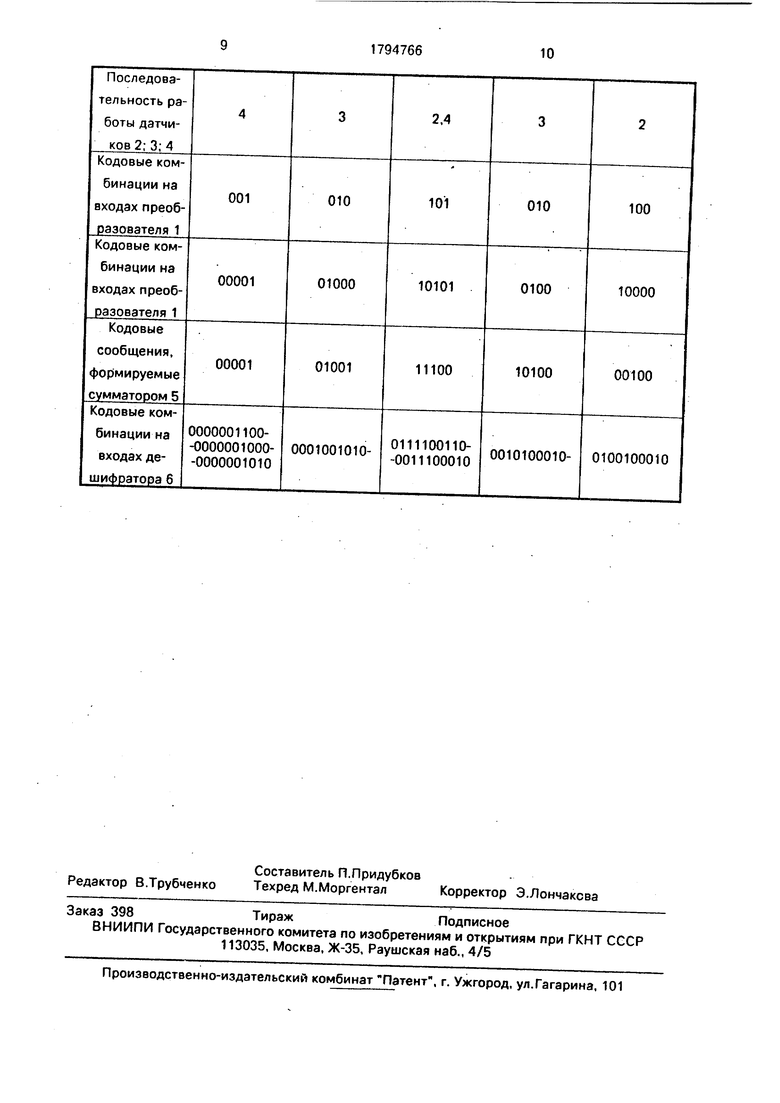
5 действия датчиков 2,3 и 4, последовательность работы которых в этом случае следующая: 4-3-2; 4-3-2. В таблице приведены: последовательность работы датчиков 2,3 и 4 и соответствующие ее кодовые комбинации
0 на входах и выходах преобразователя 1 кода, кодовые сообщения, формируемые сумматором 5 и входные кодовые комбинации на входах дешифратора б. Как видно из приведенной таблицы в момент ухода первой
5 по ходу движения колесной пары из зоны действия датчика 1 на входах дешифратора 6 устанавливается кодовая комбинация 0000001000, которая обуславливает появление сигнала на шестнадцатом выходе де0 шифратора 6. Данный сигнал поступает на вход установки в 1 триггера 9, который из исходного состояния О переходит в состояние 1, что соответствует появлению сигнала 1 на девятом входе дешифратора 6.
5 При прохождении второй колесной парой первой 2-осной тележки датчика 2, то есть в момент выхода данной тележки с участка опознавания на входе дешифратора 6 устанавливается кодовое сообщение
0 0100100010, которое обуславливает появление сигнала на пятом выходе дешифратора 6. Сигнал с пятого выхода дешифратора б поступает на третий информационный вход сумматора 13, что соответствует формиро5 ванию на информационных входах суммато- .ра 13 кодовой комбинации: 001000000000, которая суммируется с исходным кодом 000000000000 в результате в сумматоре 13 формируется кодовое число 001000000000. Одновременно сигнал с пятого выхода дешифратора 6 через элемент 11 подается на управляющий вход дешифратора 12 и сбросовые входы сумматора 5 и триггеров 7,8 и 9. По заднему фронту данного сигнала сумматора 5 и триггеры 7,8 и 9 возвращаются в исходное состояние. Таким образом, после прохождения первой вагонной тележкой 4-осного вагона участка опознавания сумматора 13 находится в состоянии 001000000000, а остальные блоки устройства - в исходном состоянии.
Во время прохождения в первоначальном направлении участка опознавания второй вагонной тележкой данного вагона устройство работает аналогичным образом. И в этом случае в момент ухода последней пары второй тележки с участка опознавания формируется сигнал на пятом выходе де- шифратора 6, обуславливающий формирование кодовой комбинации 001000000000 на информационных входах сумматора 13, которая суммируется с ранее записанным кодом 001000000000, в результате в сумматоре 13 образуется кодовое число 000100000000. Одновременно сигнал с пя-. того выхода дешифратора 6 через элемент 11 подается на синхронизирующий вход дешифратора 12 или сбросовые входы сумматора 5 и триггеров 7,8 и 9. Коду 000100000000, сформированному сумматором 13 соответствует появление сигнала на
третьем выходе дешифратора 12, поступающего на выход Б устройства и через элемент 14 на сбросовый вход сумматора 13.
Таким образом, формирование сигнала на третьем выходе дешифратора 12 а, следовательно, и на выходе Б заявляемого устройства соответствует прохождению участка опознавания 4-осным вагоном в направлении от датчика 4 к датчику 2. Причем, после появления сигнала на выходе В, по
задним фронтам сигналов, формируемых элементами 11 и 14 устройство возвращается в исходное состояние.
При подходе к участку опознавания 6- осного или 8-осного грузового вагона со стороны датчика 2 (4) с последующим движением данного вагона по участку опознавания без смены направления движения устройство работает аналогичным образом как и при движении в том же направлении
4-осного вагона, в этом случае в момент выхода вагона из зоны опознавания фдрми- руется сигнал на выходе В (Г) или Д (Е),
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для опознавания рельсовых транспортных средств | 1988 |
|
SU1615016A1 |
| Устройство для передачи информации о подвижном составе железных дорог | 1990 |
|
SU1791256A1 |
| Устройство для записи информации на колеса транспортного средства | 1989 |
|
SU1695378A1 |
| Устройство для автоматической маркировки железнодорожных единиц подвижного состава | 1987 |
|
SU1507633A1 |
| Устройство считывания информации с колес транспортного средства | 1988 |
|
SU1609719A1 |
| УСТРОЙСТВО КОРРЕКТИРОВКИ ЛИНЕЙНОЙ КООРДИНАТЫ НАХОЖДЕНИЯ ПОЕЗДА | 2003 |
|
RU2248291C2 |
| УСТРОЙСТВО СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2012 |
|
RU2506186C1 |
| Устройство для опознания типа вагона | 1980 |
|
SU943060A1 |
| та гхСЕСОЮЗНАЯ | 1973 |
|
SU377263A1 |
| Устройство для фиксации преследования сцепных соединений железнодорожного подвижного состава | 1987 |
|
SU1588614A1 |
Использование: в автоматике и телемеханике на транспорте и может быть использовано для опознавания типа железнодорожного вагона. Сущность изобретения: устройство содержит три датчика 2,3,4, сумматор 5, два дешифратора 6, три триггера 7,8,9, два элемента ИЛИ 11,14. 2-1-5-6-11- 13-12-14-13, 3-1-5-6-11-13-12-14-13, 4-1-5-6- 11-13-12-14-13, 6-8-6-, 6-11-7-6, 11-7-6, 11-8-6.5-8,5-11. 1 ил.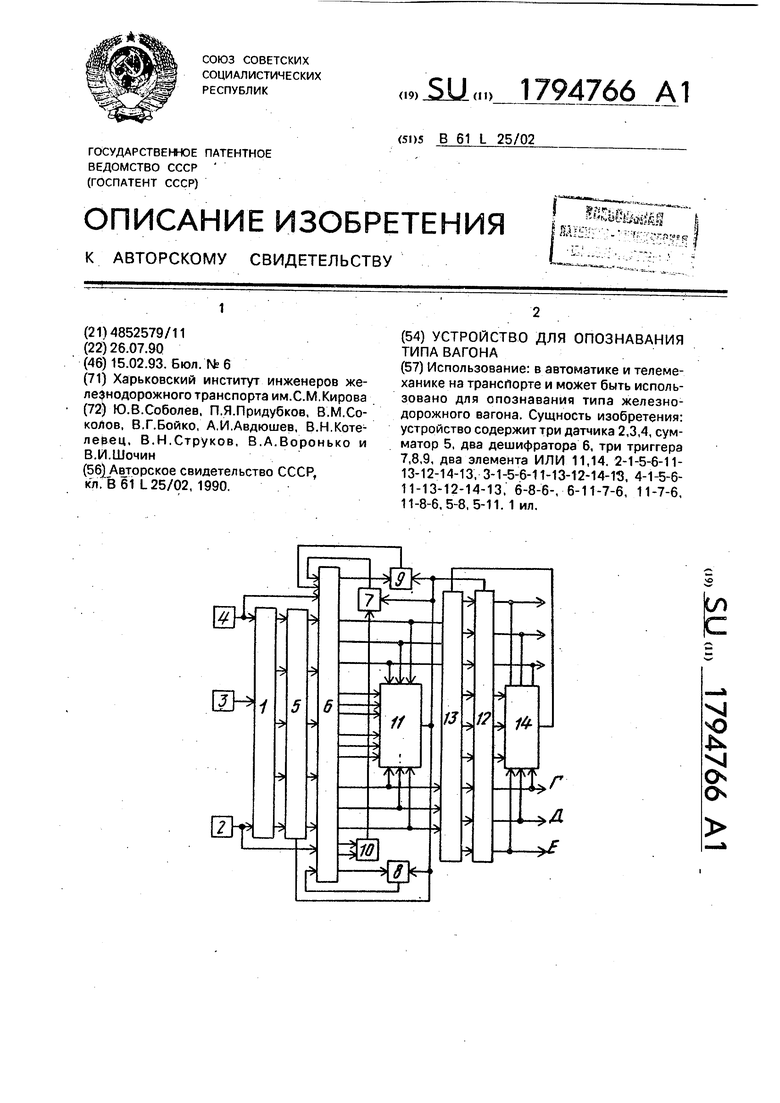
Формула изобретения Устройство для опознавания типа вагона, содержащее установленные вдоль пути датчики прохода оси на расстоянии друг от друга, равном расстоянию между осями ко- лесных пар тележки грузового вагона, триггеры, дешифратор, выходами подключенный к входам элемента ИЛИ, отличающееся тем, что, с целью повышения достоверности, оно снабжено преобразова- телем кода, входами соединенным с выходами датчиков прохода оси, сумматорами, входы одного из которых подключены к выходам преобразователя кода, дополнительными элементами ИЛИ и дешифратором, входы которого подключены к выходам одного и сумматоров, первые выходы - к информационным входам другого сумматора и одним входам второго элемента ИЛИ, вторые выходы - к другим входам второго эле- мента ИЛИ, третьи выходы - к входам
третьего элемента ИЛИ, выходом соединенного с входом одного из триггеров, а четвертые выходы - к одним входам второго и третьего триггеров, выходы которых соединены с одним из управляющих входов дополнительного дешифратора, причем выход второго элемента ИЛИ соединен со сбросовыми входами триггеров, первого сумматора и первого дешифратора, входы которого соединены с выходами второго сумматора, управляющим входом подключенного к выходу первого элемента ИЛИ, при этом выходы первого и второго датчиков соединены с включающими входами дополнительного дешифратора, другой управляющий вход которого подключен к выходу первого триггера, а второй датчик прохода оси установлен от третьего на расстоянии, равном расстоянию между внутренними осями колесных пар четырехосной тележки грузового вагона.
