Изобретение относится к электротехнике, в частности к автоматике и адаптивному управлению электррприводэми.
Целью изобретения является повышение точности обработки.
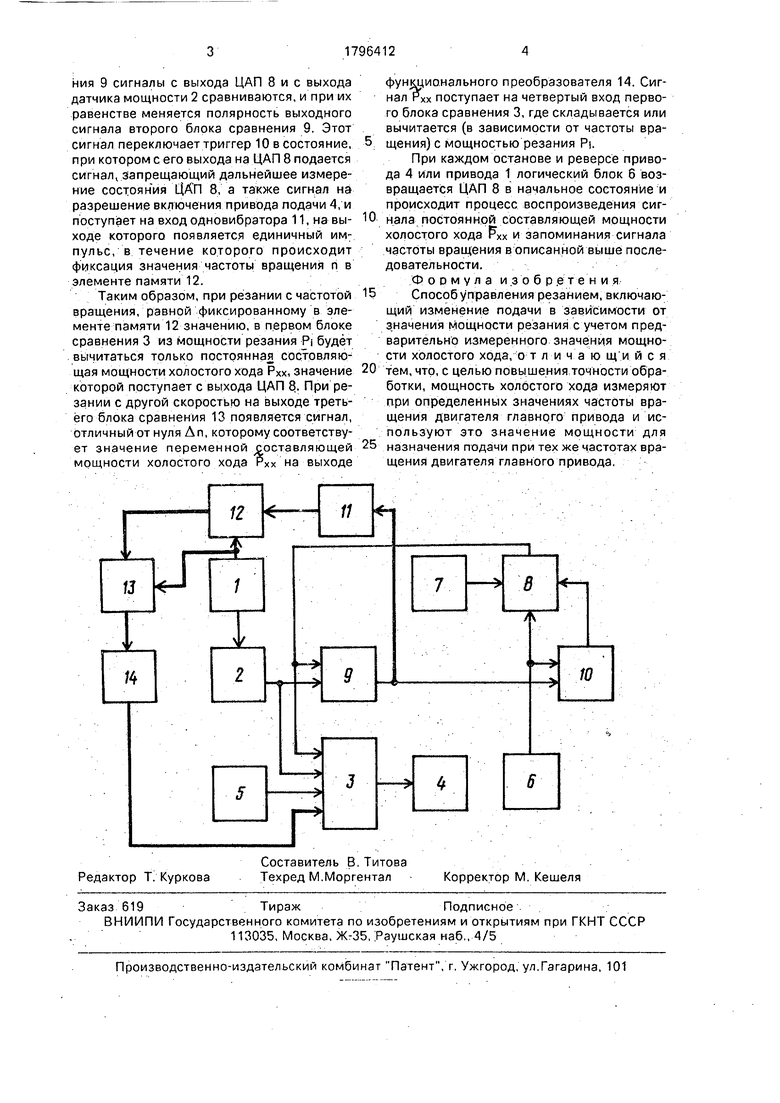
На чертеже приведена функциональная схема устройства, реализующего предложенный способ.
Устройство содержит последовательно соединенные привод главного движения 1, датчик мощности 2, первый блок сравнения 3 и привод подачи 4, причем, ко второму входу первого блока сравнения 3 подключен задатчик мощности 5.
Логический блок 6 и генератор импульсов 7 своими выходами подключены к циф-. роаналоговому преобразователю (ЦАП) 8, к которому последовательно подключены второй блок сравнения 9 и триггер 10, причем второй вход триггера 10 подключен к выходу логического блока 6. Цифроаналого- вый преобразователь 8 выходом подключен к третьему входу первого блока сравнения 3, выход датчика мощности 2 подключен ко второму входу второго блока сравнения 9. . Последовательно соединенные одновибратор 11, элемент памяти 12, третий блок сравнения 13 и функциональный преобразователь 14 подключены -к четвертому входу первого блока сравнения 3, причем вход одновибратора 11 связан с выходом второго блока сравнения 9, а вторые входы элемента памяти 12 и третьего блока сравнения 13 подключены ко второму выходу главного электропривода 1 (выходу частоты вращения п).
Предлагаемый способ реализуется следующим образом.
При отключенных приводах 1 и 4 на выходе логического блока 6 сигнал соответствует установке триггера 10 и ЦАП 8 в исходное начальное состояние. После включения привода 1 с выдержкой времени, необходимой для его разгона до рабочей скорости, на выходе логического блока 6 появляется сигнал, который выдает разрешение на изменение состояния триггера 10 и ЦАП 8. Напряжение на выходе ЦАП 8 начинает монотонно и дискретно изменяться в соответствии с количеством импульсов, поступивших на вход ЦАП 8 с выхода генератора импульсов 7. На входе блока сравнеел
XI
ю
а
ю
ния 9 сигналы с выхода ЦАП Вис выхода датчика мощности 2 сравниваются, и при их равенстве меняется полярность выходного сигнала второго блока сравнения 9. Этот сигнал переключает триггер 10 в состояние, при котором с его выхода на ЦАП 8 подается сигнал запрещающий дальнейшее измерение состояния ЦАП 8, а также сигнал на разрешение включения привода подачи 4, и поступает на вход одновибрэтора 11, на выходе которого появляется единичный им; пульс, в течение которого происходит фиксация значения частоты вращения п в элементе памяти 12.
Таким образом, при резании с частотой вращения, равной фиксированному в элементе памяти 12 значению, в первом блоке сравнения 3 из мощности резания Pi будет вычитаться только постоянная состовляю- щая мощности холостого хода РХх, значение которой поступает с выхода ЦАП 8.. При резании с другой скоростью на выходе третьего блока сравнения 13 появляется сигнал, отличный от нуля An, которому соответствует значение переменной составляющей мощности холостого хода Рхх на выходе
0.
5
0
5
функционального преобразователя 14. Сигнал РХХ поступает на четвертый вход первого блока сравнения 3, где складывается или вычитается (в зависимости от частоты вращения) с мощностью резания PI.
При каждом останове и реверсе привода 4 или привода 1 логический блок б возвращается ЦАП 8 в начальное состояние и происходит процесс воспроизведения сигнала постоянной составляющей мощности холостого хода РХХ и запоминания сигнала частоты вращения в описанной выше последовательности.
Формула и з о б р е т е н и я Способ управления резанием, включающий изменение подачи в зависимости от значения мощности резания с учетом предварительно измеренного значения мощности холостого хода, о т ли чаю щ .и и с я тем, что, с целью повышения точности обработки, мощность холостого хода измеряют при определенных значениях частоты вращения двигателя главного привода и используют это значение мощности для назначения подачи при тех же частотах вращения двигателя главного привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адаптивного управления станком | 1987 |
|
SU1618584A1 |
| Устройство для программного управления металлорежущими станками | 1987 |
|
SU1509829A1 |
| Устройство для программного управления металлорежущими станками | 1977 |
|
SU641405A1 |
| Устройство для измерения мощности резания | 1989 |
|
SU1739220A2 |
| Устройство для управления дроблением стружки на токарных станках с программным управлением | 1983 |
|
SU1111132A1 |
| УСТРОЙСТВО АДАПТИВНОГО УПРАВЛЕНИЯ СТАНКОМ | 2015 |
|
RU2594049C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ РЕЖУЩЕГО ИНСТРУМЕНТА НА СТАНКЕ С ЧПУ | 1991 |
|
RU2030981C1 |
| Устройство для управления шлифовальным станком | 1986 |
|
SU1381433A1 |
| Способ получения активированного угля | 1992 |
|
SU1838235A3 |
| Устройство для струйной промывки деталей | 1991 |
|
SU1838001A3 |
Использование: электротехника, автоматика, адаптивное управление электроприводами. Сущность: изменяют подачу в зависимости от значения мощности резания с учетом предварительно измеренного значения мощности холостого хода. Измеряют мощность холостого хода при определенных значениях частоты вращения двигателя главного привода. Используют это значение мощности для назначения подачи при тех же частотах вращения двигателя главного привода. 1 ил.
| Адаптивное управление станками./Под ред | |||
| Б.С.Балакшина, М.: Машиностроение, 1973, с.425-436 | |||
| Устройство для программного управления металлорежущими станками | 1977 |
|
SU641405A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
