Изобретение относится к измерительной технике и может быть использовано для определения линейного положения движущихся частей механизмов, в частности што- ков гидроцилиндров относительно собственного корпуса.
Известно устройство для определения линейного положения штока гидроцилиндра относительно собственного корпуса, содержащее дифференциальный трансформатор, укрепленный на корпусе гидроцилиндра, и магнитный сердечник, укрепленный на штоке гидроцилиндра.
Недостатком этого устройства является малый диапазон определения положения штока гидроцилиндра относительно его корпуса,
Наиболее.близким по технической сущности заявляемому изобретению является приспособление для измерения расстояния или зазора между разнесенными поверхностями, содержащее комплект стержней связи различной длины, элементы сопряжения этих стержней между собой, которые выполнены в виде разрезных втулок-хомутов, со- единенных шарнирно между собой и снабженных базами, выполненными в виде разрезной втулки с хомутом, и базовой опорой, устанавливаемыми на одном или нескольких стержнях, и индикатор, устанавливаемый на стержне.
Недостатком этого приспособления также является малый диапазон измерения расстояния между разнесенными поверхн р- стями.
Целью изобретения является расширение диапазона измерения.
Поставленная цель достигается тем, что предлагаемое устройство для определения линейного положения штока гидроцилинд- ра относительно его корпуса, содержащее основание и размещенный на нем преобразователь, снабжено двумя угловыми двупле- чими рычагами, одни плечи которых закреплены на неподвижной части преоб- разователя, другие предназначены для взаимодействия, соответственно, с корпусом гидроцилиндра и его штоком, расположенным между первыми плечами рычагов шатуном, связанным с подвижной частью преобразователя, установленной с возможностью перемещения вдоль шатуна кареткой и двумя тягами, соединяющими каретку с первыми плечами соответствующих рычагов.
Установка преобразователя на гидроцилиндр при помощи двух двуплечих рычагов, шатуна с кареткой и двумя тягами позволила осуществить преобразование положений штока гйдроцилиндра относительно его корпуса в угловые положения измерительного преобразователя в широком диапазоне положений штока.
На фиг. 1 показана кинематическая схема устройства для определения линейного положения штока гидроцилиндра относительно его корпуса, где приняты следующие обозначения: 1 - неподвижная часть преобразователя, 2 - подвижная часть преобразователя, 3 - первое плечо первого двуплечего рычага, 4 - первое плечо второго двуплечего рычага, 5- второе плечо первого двуплечего рычага, 6 - второе плечо второго двуплечего рычага, 7 - шатун, 8 - каретка, 9, 10 - тяги, 11 - корпустидроцилиНдра, 12 - шток гидроцилиндра, 13, 14 - шаровые опоры.
Устройство для определения линейного положения штока гидроцилиндра относительно его корпуса (см, фиг. 1) содержит измерительный преобразователь, например, в виде синусно-косинусного вращающегося трансформатора.
Неподвижная часть 1 преобразователя скреплена с первым плечом первого двуплечего рычага 3, который противоположным концом посредством шарового шарнира 13 установлен на втором плече первого двуплечего рычага 5, закрепленном на корпусе 11 гидроцилиндра. Подвижная часть 2 этого же преобразователя скреплена с шатуном 7, на противоположном конце которого насажена каретка 8. Каретка 8 соединена тягой 9 с первым плечом первого двуплечего рычага 3, а тягой 10 - с первым плечом второго двуплечего рычага 4, который одним концом скреплен с осью вращения подвижной части 2 преобразователя, а противоположным концом посредством шарового шарнира 14 установлен на втором плече второго двуплечего рычага 6, закрепленном на конце штока 12 гидроцилиндра. Второе плечо второго двуплечего рычага 6 развернуто и противоположно направлено относительно второго плеча первого двуплечего рычага 5.
Соотношение длин каждого из плеч 5 и б по отношению к длине плеча 3 и к длине плеча 4 было выбрано опытным путем и составило выражение 1:2:4. Именно такое соотношение позволило определить положение штока гидроцилиндра относительно его корпуса в максимально возможном диапазоне перемещений при минимальных габаритах самого устройства.
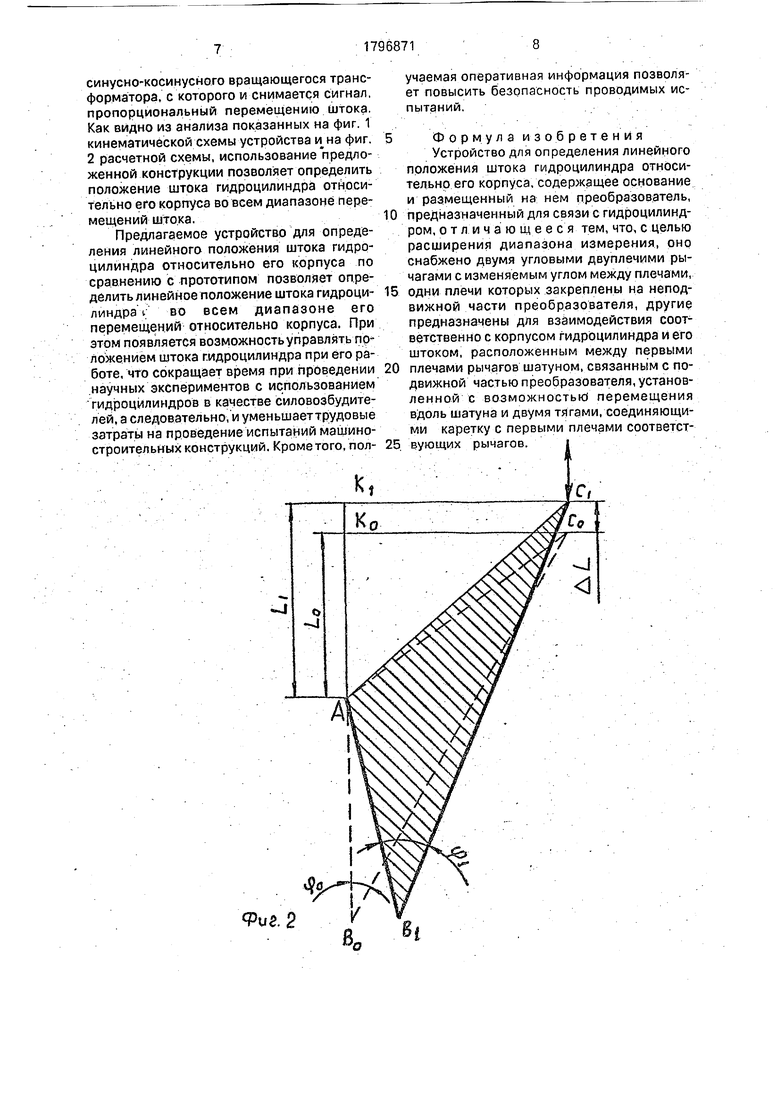
На фиг. 2 показана расчетная схема определения положения штока гидроцилиндра относительно его корпуса, где приняты следующие обозначения:
АВо - положение первого плеча 3 первого двуплечего рычага-в начальном положении;
ABi - положение первого плеча 3 первого двуплечего рычага в смещенном положении;
В.оСо - положение первого плеча 4 второго двуплечего рычага в начальном поло- жении;
Bid - положение первого плеча 4 второго двуплечего рычага в смещенном положении;
tpQ- угол между первыми плечами 3 и 4 первого и второго двуплечих рычагов в начальном положении; р - угол между первыми плечами 3 и 4 первого и второго двуплечих рычагов в смещенном положении;
LQ-вертикальная проекция расстояния конца первого плеча 4 второго двуплечего рычага относительно конца первого плеча 3 первого двуплечего рычага в начальном положении;: . . ; /.
1и вертикальная проекция расстояния конца первого плеча 4 второго двуплечего рычага относительно конца плеча 3 первого двуплечего рычага в смещейном положении;
вертикальное смещение конца первого плеча 4 второго двуплечего рычага относительно своего первоначального положения;
КоСо - горизонтальная проекция рас стояния конца первого плеча 4 второго плечего рычага относительно конца первого плеча 3 первого двуплечего рычага в начальном положении;:
Kid - горизонтальная проекция рас- стояния конца первого плеча 4 второго двуплечего рычага относительно конца первого плеча 3 первого двуплечего рычага в смещенном положении.
Исходя из решаемой задачи АВо ABi ,
ВоСо BiCi 2 ABo.
При рассмотрении треугольника АВоСо по теореме косинусов
АСо2 АВо2 + ВоСо2 - 2 АВо ВоСо cos pо, а при рассмотрении прямоугольного треугольника АКоСо по теореме Пифагора:
U) AkoWACo2-KoCo2; при использовании формулы функции поло- винного угла:
- .sln ;
Рассмотрев аналогично предыдущему треугольник ABiCi, получим
Li 2/2n.ABo-sin - .
Искомая величина Д1 будет выражена как разность:
AL Li-Lo-2 / -ABo.sln ABo Sln .:
Поскольку при определении положения
штока гидроцилиндра sin
:.const, то выражение A L можно представить в упрощенном виде:
-Do,
где Ости Di являются постоянными величинами:
, Оое 2Я АВо-з1п ; D 2}f2ABo
Таким образом, измеряя sin Цс по20
25
3 О
35
0
5
0
5
мощью заявляемого устройства, появляется возможность определения положения штока гидроцилиндра относительно его корпуса в;о всём диапазоне его перемещений.
Устройство для определения линейного положения штока тйдроцилиндра относительно его корпуса работает следующим образом,
Перемещение штока 12 гидроцилиндра относительно его корпуса 11 приводит к взаимному перемещению вторых плеч 5 и 6 первого и второго доуплечих рычагов, Первые плечи 3 и 4 первого и второго двуплечих рычагов соответственно изменяют свое угловое положение. Изменение углового положения между первыми плечами 3 и 4 первого и второго двуплечих рычагов происходит в нелинейной зависимости от изменения линейного перемещения штока 12 относительно корпуса 11 гидроцилиндра, как это видно из расчётной схемы, показанной на фиг. 2, Получение в измерительном преобразователе отсчета в виде функции синуса половинного угла достигается тем, что с первым плечом 3 первого двуплечего рычага скреплена неподвижная часть 1 измерительного преобразователя, выполненного в виде синусно-косинусного вращающегося трансформатора, подвижная часть 2 которого скреплена с шатуном 7 и перемещающейся вдоль него кареткой 8. Каретка 8, скрепленная тягами 9 и 10 с первыми плечами 3 м 4 первого и второго двуплечих рычагов соответственно, удерживает шатун 7 постоянно на равном угловом расстоянии от каждого из первых плеч 3 и 4. Это позволяег производить деление угла между первыми .плечами 3 и 4 первого и второго двуплечих рычагов пополам, а функциональная (синусная) зависимость обеспечивается передаточной характеристикой
синусно-косинусного вращающегося трансформатора, с которого и снимается сигнал, пропорциональный перемещению штока. Как видно из анализа показанных на фиг. 1 кинематической схемы устройства и на фиг. 2 расчетной схемы, использование предложенной конструкции позволяет определить положение штока гидроцилиндра относительно его корпуса во всем диапазоне перемещений штока.
Предлагаемое устройство для определения линейного положения штока гидроцилиндра относительно его корпуса по сравнению с прототипом позволяет определить линейное положение штока гидроцилиндра ч во всем диапазоне его перемещений относительно корпуса. При этом появляется возможностьуправлять положением штока гидроцилиндра при его работе, что сокращает время при проведении .научных экспериментов с использованием гидроцилиндров в качестве силовозбудите- лей, а следовательно, и уменьшаеттрудовые затраты на проведение испытаний машиностроительных конструкций. Кроме того, пол0
5
0
5
учаемая оперативная информация позволяет повысить безопасность проводимых испытаний.
Формула изобретения Устройство для определения линейного положения штока гидроцилиндра относительно его корпуса, содержащее основание и размещенный на нем преобразователь, предназначенный для связи с гидроцилиндром, отличаю щ е е с я тем, что, с целью расширения диапазона измерения, оно снабжено двумя угловыми двуплечими рычагами с изменяемым углом между плечами, одни плечи которых закреплены на неподвижной части преобразователя, другие предназначены для взаимодействия соответственно с корпусом гидроцилиндра и его штоком, расположенным между первыми плечами рычагов шатуном, связанным с подвижной частью преобразователя, установленной с возможностью1 перемещения вдоль шатуна и двумя тягами, соединяющими каретку с первыми плечами соответствующих рычагов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Металлорежущий станок | 1990 |
|
SU1830333A1 |
| Поливальщик автоматический фронтальный | 1979 |
|
SU886851A1 |
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ (ВАРИАНТЫ), ПРОДОЛЬНО-МНОГОРЯДНЫЙ МАГАЗИН, КОМПЕНСАЦИОННОЕ УСТРОЙСТВО ОТПИРАНИЯ КАНАЛА СТВОЛА, КРИВОШИПНО-ПОЛЗУННОЕ ЗАПИРАЮЩЕЕ УСТРОЙСТВО, УСТРОЙСТВО БАЛАНСИРОВКИ МАСС ПОДВИЖНЫХ ЧАСТЕЙ И КОМПЕНСАЦИОННЫЙ СПОСОБ ОТПИРАНИЯ КАНАЛА СТВОЛА | 1998 |
|
RU2144171C1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ СВАРОЧНОЙ ГОРЕЛКИ НА СТЫК | 1987 |
|
SU1471416A1 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1998 |
|
RU2130866C1 |
| Грузозахватное устройство | 1990 |
|
SU1740297A1 |
| Загрузочное устройство | 1981 |
|
SU1038184A1 |
| Съемный ковш погрузочной машины | 1983 |
|
SU1148831A1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1993 |
|
RU2067675C1 |
Изобретение относится к измерительной технике. Целью изобретения является расширение диапазона измерения. Цель достигается за счет того, что неподвижная часть 1 преобразователя скреплена с первым плечом первого двуплечого рычага 3, второе его плечо посредством шарового шарнира 13 связано с рычагом 5, скрепленным с корпусом 11 гидроцияиндра. Подвижная часть 2 этого преобразователя соединена с шатуном 7, на котором размещена каретка 8, соединена тягой 9с рычагом 3 и тягой 10 с рычагом 4, который одним концом соединен с подвижной частью 2 преобразователя, а другим концом посредством шарнира 14 - с рычагом 6, закрепленным на штоке. 12 гидроцилиндра. 2 ил. 6 / Ј
| Патент США №4556886; кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| v, | |||
| - | |||
| ,., | |||
| 0 |
|
SU264707A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
