Изобретение относится к дефектоскопии и может быть использовано в структуро- метрии и размерометрии материалов и изделий.
Известно устройство для неразрушающего контроля цилиндрических изделий, в котором каретки перемещаются по изделию при помощи привода с асинхронным двигателем.
Однако у данного устройства низкая точность позиционирования кареток на из- делии.
Наиболее близкой к изобретению по совокупности признаков является автоматическая система улльтразвуковой дефектоскопии крупногабаритных изделий, в которой перемещение кареток осуществляется при помощи шаговых двигателей.
Существенными помехами в осуществлении данного устройства являются шумы в зацеплении, вызванные наличием реечной передачи и поступающие в тракт контроля. . В основу изобретения положена задача повышения достоверности контроля за счет ликвидации шумов и точности позиционирования.
Поставленная задача решается тем, что в известном устройстве для неразрушающего контроля цилиндрических изделий, содержащем несущую балку с закрепленной на ней направляющей, каретку, установленную на направляющей с возможностью продольного перемещения, привод каретки,
vj ю
XI О
со
о
, выполненный в виде шагового двигателя, и преобразователь средства контроля, согласно изобретению шаговый двигатель выполнен линейным, индуктор двигателя закреплен на каретке, а его вторичный ферромагнитный элемент закреплен на направляющей с образованием зазора между его
: зубцами и зубцами полюсов индуктора.
В предложенном устройстве привод каретки выполнен в виде линейного шагового двигателя, вторичный элемент которого установлен на направляющей, а индуктор-на каретке.
При этом линейная скорость движения каретки определяется по выражению .Vn f n Д X, - где f- частота переключения катушки 17 или
18:. .
п 2 - число фаз, образованных катушками;
ДХ rz/4 -длина единичного шага;
TZ - величина зубцового деления полюсов магнитопроводов 15 и 16 и вторичного элемента 21.
Длина участка перемещения относительно начального положения определяется выражением
Д ДХ т,
где т - число шагов перемещения индуктора относительно начального положения.
Частота f и число шагов m задаются системой управления двигателя. Минимальная дискретность перемещения каретки определяется выражением
лх,ь. :
где I - коэффициент деления единичного механического шага шагового двигателя. Например, при rz мм; 1 8;
ДХ|
0,125 мм.:
4-8 При этом погрешность перемещения
c5xi ДХ| .125-cos 30° 0,1 мм,
где cos 0- угол нагрузки. .
Таким образом, высокая точность, с которой определяется положение преобразователя средства контроля на изделии пр.и его сканировании, практически бесшумность перемещения каретки по изделию, а следовательно, и отсутствие помех в тракте контроля, обеспечивает высокое качество принимаемого сигнала и его достоверность.
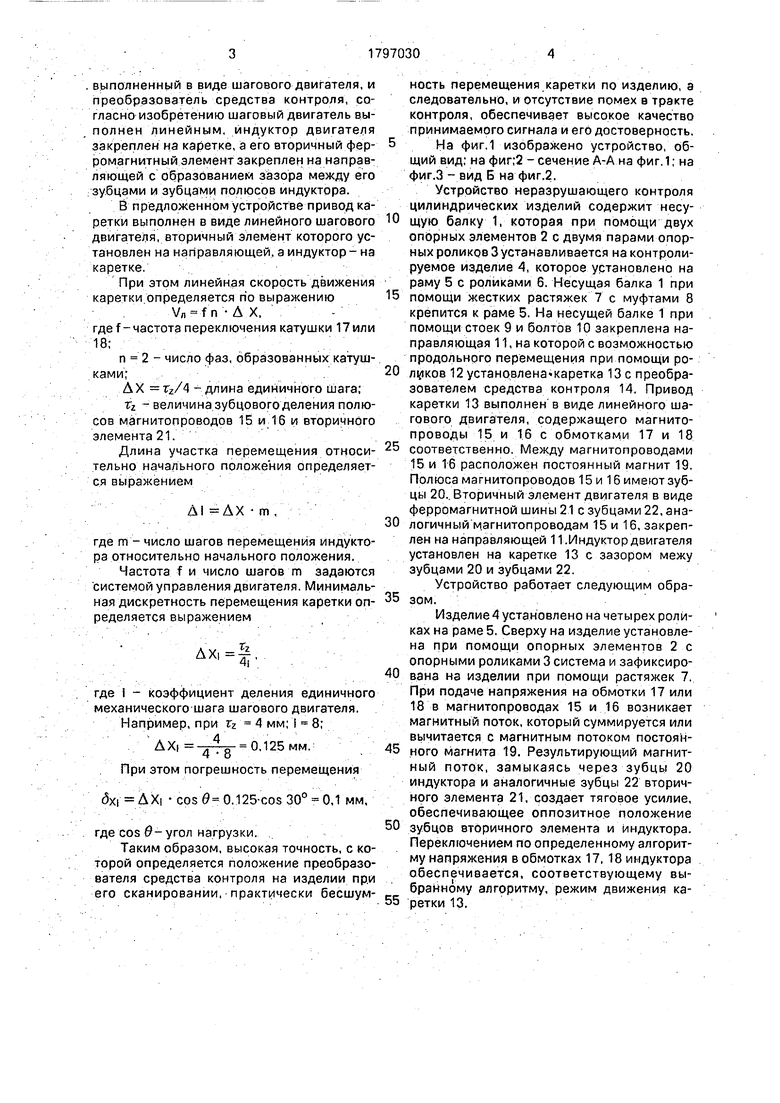
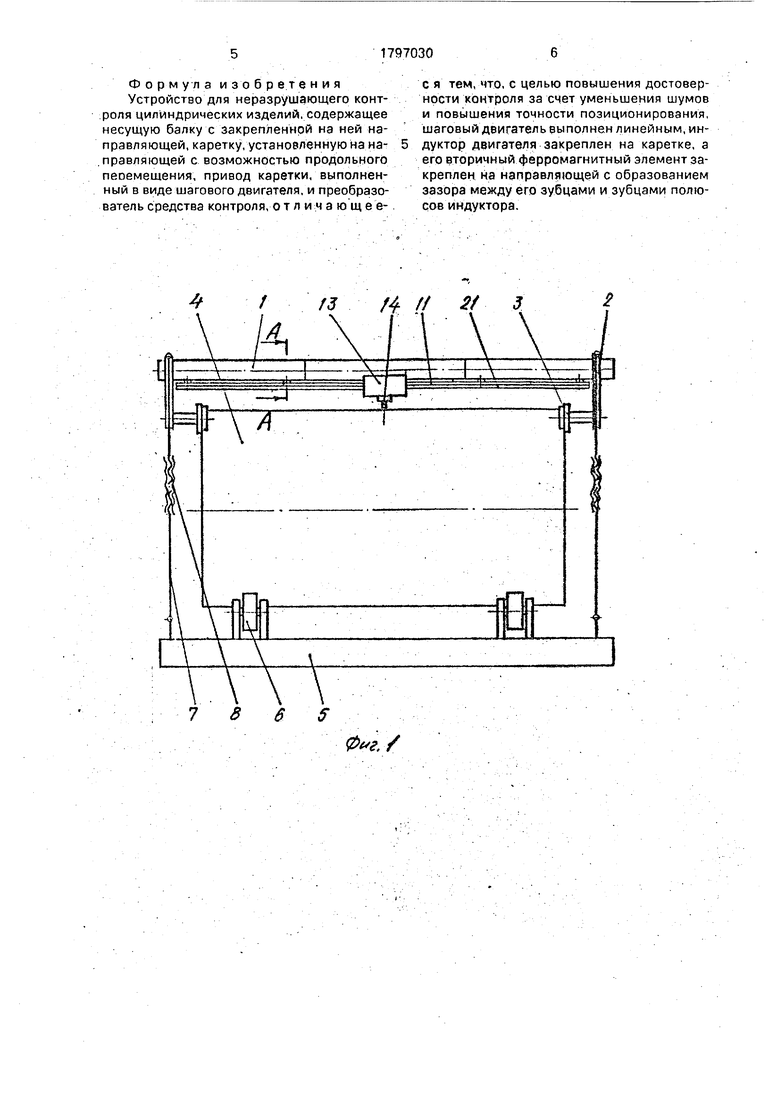
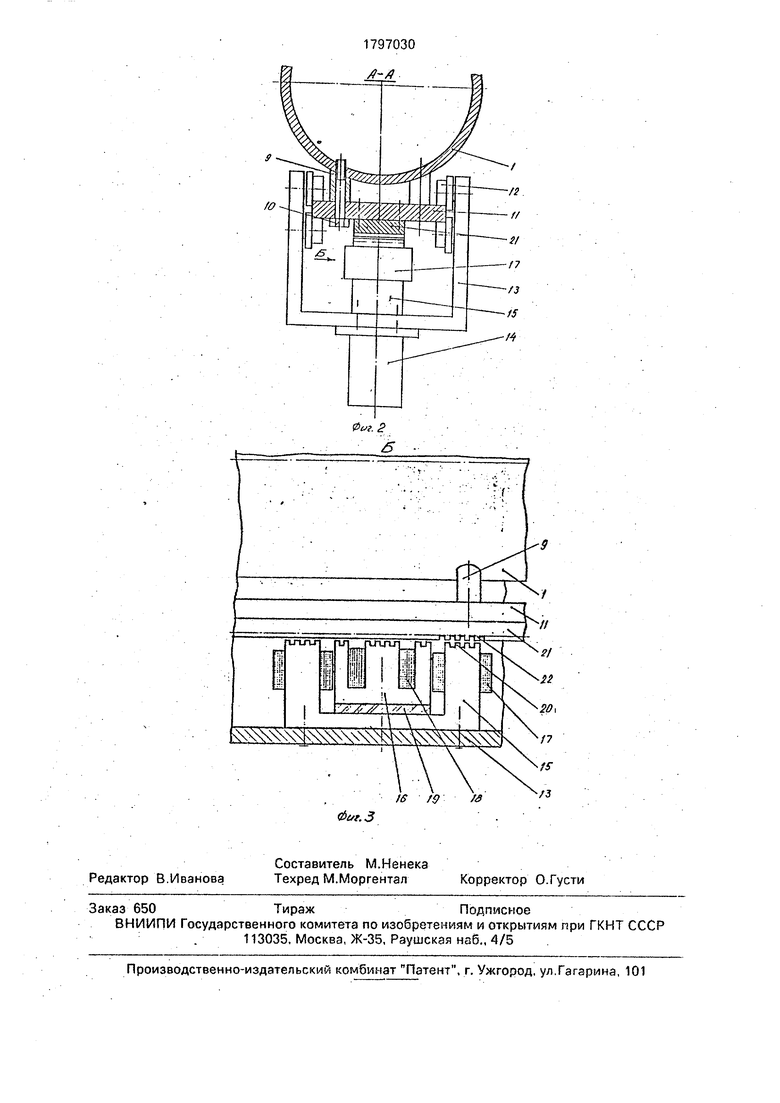
На фиг.1 изображено устройство, общий вид; на фиг;2 - сечение А-А.на фиг. 1; на фиг.З - вид Б на фиг.2.
Устройство неразрушающего контроля цилиндрических изделий содержит несущую балку1, которая при помощи двух опорных элементов 2 с двумя парами опорных роликов 3 устанавливается на контролируемое изделие 4, которое установлено на раму 5 с роликами 6. Несущая балка 1 при
помощи жестких растяжек 7 с муфтами 8 крепится к раме 5. На несущей балке 1 при помощи стоек 9 и болтов 10 закреплена направляющая 11, на которой с возможностью продольного перемещения при помощи роликов 12установлена каретка 13с преобразователем средства контроля 14. Привод каретки 13 выполнен в виде линейного шагового двигателя, содержащего магнито- проводы 15 и 1.6 с обмотками 17 и 18
соответственно. Между магнитопроводами 15 и 16 расположен постоянный магнит 19. Полюса магнитопроводов 15 и 16 имеют зубцы 20.. Вторичный элемент двигателя в виде ферромагнитной шины 21 с зубцами 22, аналогичный магнитолроводам 15 и 16, закреплен на направляющей 11,Индуктор двигателя установлен на каретке 13 с зазором межу зубцами 20 и зубцами 22.
Устройство работает следующим образом.
Изделие 4 установлено на четырех роликах на раме 5. Сверху на изделие установлена при помощи опорных элементов 2 с опорными роликами 3 система и зафиксирована на изделии при помощи растяжек 7. При подаче напряжения на обмотки 17 или 18 в магнитопроводах 15 и.16 возникает магнитный поток, который суммируется или вычитается с магнитным потоком постоянного магнита 19. Результирующий магнитный поток, замыкаясь через зубцы 20 индуктора и аналогичные зубцы 22 вторичного элемента 21, создает тяговое усилие, обеспечивающее оппозитное положение
зубцов вторичного элемента и индуктора. Переключением по определенному алгоритму напряжения в обмотках 17, 18 индуктора обеспечивается, соответствующему выбранному алгоритму, режим движения каретки 13.
Формула изобретения Устройство для неразрушающего контроля цилиндрических изделий, содержащее несущую балку с закрепленной на ней направляющей, каретку, установленную на на- . правляющей с возможностью продольного пеоемешения, привод каретки, выполненный в виде шагового двигателя, и преобразователь средства контроля, о т л и ч а ю щ е ес я тем, что, с целью повышения достоверности контроля за счет уменьшения шумов и повышения точности позиционирования, шаговый двигатель выполнен линейным, индуктор двигателя закреплен на каретке, а его вторичный ферромагнитный элемент закреплен на направляющей с образованием зазора между его зубцами и зубцами полюсов индуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный шаговый электродвигатель | 1987 |
|
SU1457105A1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| Портальный манипулятор | 1982 |
|
SU1139622A1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| Намагничивающее устройство дефектоскопа | 2019 |
|
RU2715473C1 |
| Линейный шаговый электродвигатель | 1988 |
|
SU1527690A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2166829C1 |
| СЛЕДЯЩЕ-СТАБИЛИЗИРУЮЩЕЕ УСТРОЙСТВО СКОРОСТНОГО ВАГОНА-ДЕФЕКТОСКОПА | 2014 |
|
RU2581343C2 |
| Беспленочная автоматизированная рентгенометрическая система | 2019 |
|
RU2707577C1 |
| ПОДВЕСНАЯ МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2219082C1 |
Изобретение относится к дефектоскопии и может использоваться для структуро- сколии и размеропетрии. материалов и изделий. Цель изобретения - повышение достоверности контроля за счет .уменьшения шумов и повышения точности позиционирования - достигается благодаря тому, что в устройстве для неразрушающего контроля цилиндрических изделий, содержащем несущую балку с закрепленной на ней направляющей, каретку, установленную с возможностью перемещения по направляющей, привод каретки выполнен в виде линейного шагового двигателя, индуктор которого закреплен на каретке, а его вторичный ферромагнитный элемент - на направляющей с образованием зазора между его зубцами и зубцами полюсов индуктора. 3 ил. hsСЛ С
. /
| Устройство для неразрушающегоКОНТРОля издЕлий | 1977 |
|
SU824013A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для неразрушающего контроля изделий сложной формы | 1988 |
|
SU1518773A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
