Q1 О ГО
СО
со
3ч
Изобретение относится к машиностроению, а точнее к конструкции манипуляторов с цикловым режимом работы.
Цель изобретения - упрощение конструкции манипулятора.
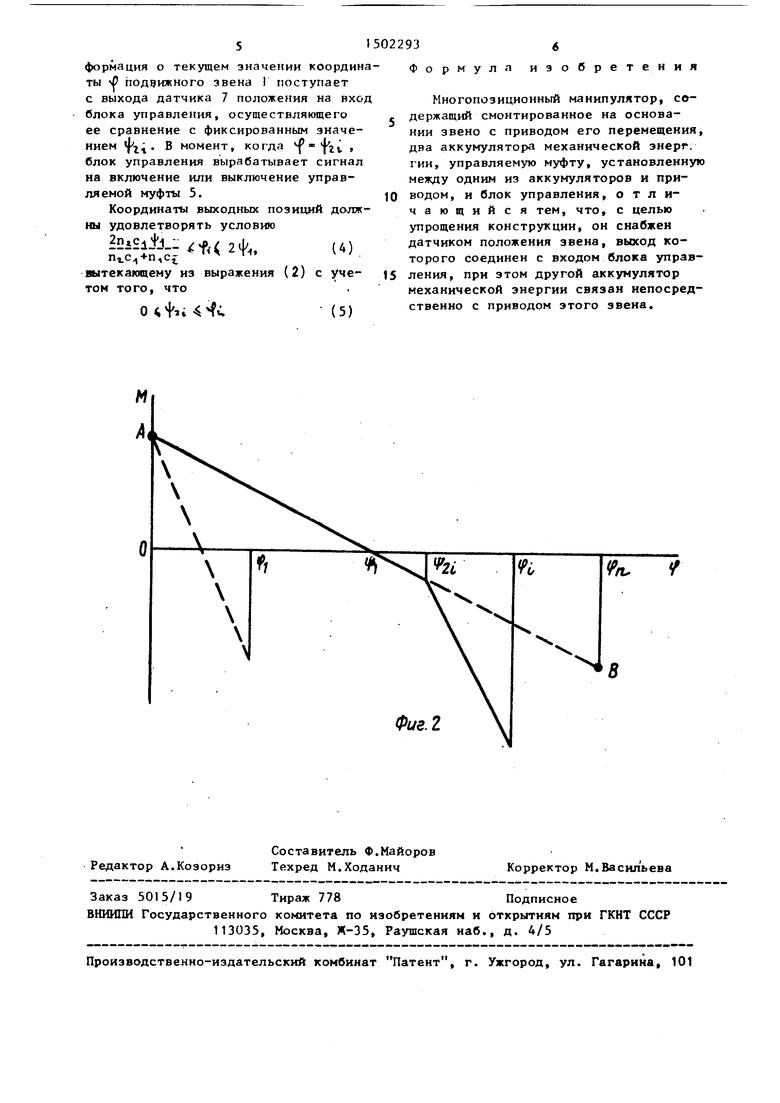
На фиг.1 изображена кинематическая схема многопоэиционного манипулятора; на фиг.2 - график зависимости момента сил, развиваемого аккумуляторами механической энергии и приведенного к звену манипулятора, от координаты звена манипулятора.
Манипулятор содержит звено 1, привод его перемещения с двигателем 2, аккумуляторы 3 и 4 механической энергии, управляемую муфту 5, установленную между приводом эвена и аккумулятором А механической энергии, управляемый упор-фиксатор 6 и датчик 7 положения звена 1, причем выход датчика 7 положения звена соединен с входом блока управления (не показан), вькоды которого соединены с управляющими обмотками двигателя 2, управляемой муфты 5 и управляемого упора-фиксатора 6.
Устройство работает следующим образом.
В исходном положении координата j f подвижного звена 1 равна (фиг. при этом момент сил, развиваемый аккумулятором 3 механической энерги равен нулю, а управляемая муфта 5 и управляемый упор-фиксатор 6 выключены. Для выведения подвижного звена 1 в рабочий режим с блока управлени на двигатель 2 должны поступать управляющие сигналы, обеспечивающие
signK t signf ; 1Алб1 Ucl ,
(I)
где
М
Aft
момент сил, развиваемый двигателем 2; AAI и АС. - соответственно работа, производимая двигателем 2, и работа сил трения в течение одВыражение (2) вытекает из закона 45 ,«.охранения энергии, герметической интерпретацией которого является ра венство площадей области, ограни- |ченной зависимостью M(i) (фиг.2) и прямыми М-0, - О, и области, ограного полупериода ко- 50 ниченной зависимостью M(«f) и прямылебания звена 1.
ми М - О, f f,- , причем
0
При соблюдении условий (1) подвижное звено 1 осуществляет колебательные движения с возрастающей амплитудой, которым соответствует отрезок АВ прямой на фиг.2. При достижении подвижным звеном 1 позиции с координатой tf О 11ключается управляемый ; упор-фиксатор 6, обеспечивающий высотой подвижного звена 1.
В дальнейшем двигатель 2 используется только для компенсации потерь энергии, вызванных силами трения.
При использовании манипулятора, 5 например, в устройствах сортировки
0
5
0
, рдр .
он может иметь одну исходную (tf О) и п промежуточных позиций. В этом случае при отключении управляемого упора-фиксатрра 6 подвижное звено I под действием аккумулятора 3 механической энергии и двигателя 2, компенсирующего момент сил трения, пе- пемещается в крайнюю позицию с координатой fnAic ° , где фиксируется управляемым упором-фиксатором 6. Для того, чтобы переместить подвижное звено 1 из исходной позиции с О в промежуточную позицию с Pt Рмлк необходимо включить управляемую муфту 5 в |«оменг, когда подвижное звено достигнет координаты
.
(2V.). (2)
рдр .
и с,. и п.
жесткости пружин аккумуляторов 3 и 4 механической энергии.соответственно;
передаточные отношения передач между аккумуляторами 3 и 4 механической энергии и подвижным звеном 1.
Выражение (2) вытекает из закона ,«.охранения энергии, герметической интерпретацией которого является равенство площадей области, ограни- |ченной зависимостью M(i) (фиг.2) и прямыми М-0, - О, и области, ограниченной зависимостью M(«f) и прямыниченной зависимостью M(«f
ми М - О, f f,- , причем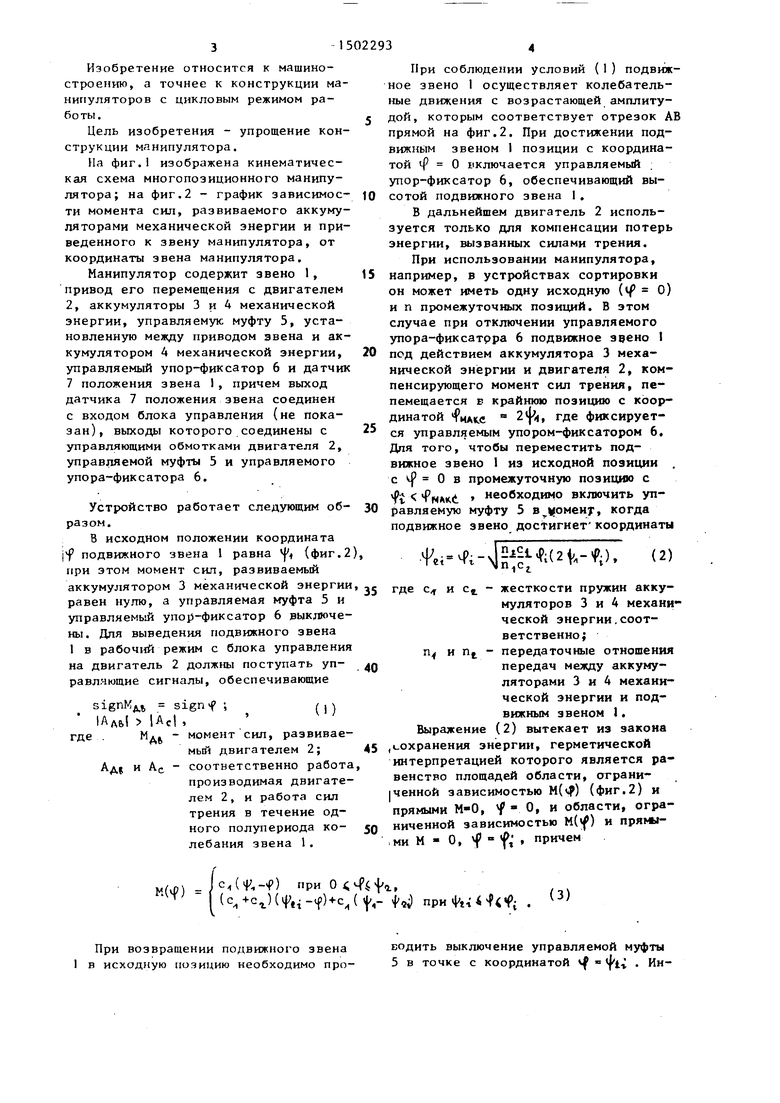
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Модуль манипулятора | 1987 |
|
SU1466934A1 |
| Модуль манипулятора | 1991 |
|
SU1799725A1 |
| Модуль манипулятора | 1991 |
|
SU1798177A1 |
| Автоматический манипулятор с цикловым управлением | 1983 |
|
SU1151449A2 |
| Манипулятор с цикловым управлением | 1983 |
|
SU1110624A2 |
| Манипулятор с цикловым управлением | 1978 |
|
SU738865A1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Резонансный привод промышленного робота | 1987 |
|
SU1570892A1 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
Изобретение относится к машиностроению, а точнее к конструкции манипуляторов с цикловым режимом работы. Целью изобретения является упрощение конструкции. Перемещение звена 1 происходит из исходного положения в крайнее под действием аккумулятора механической энергии 3, при этом потери, возникающие в результате перемещения, компенсируются приводом с двигателем 2. Для остановки звена 1 в промежуточном положении служит аккумулятор механической энергии 4, связь которого со звеном 1 осуществляется посредством управляемой муфты 5 при подходе звена к точке порционирования. Фиксирование положения звена осуществляется посредством упора-фиксатора 6. 2 ил.
м(кр) Jc-,(f,-f) при . )(f,.-)-fc(,- 4.,;) .
При возвращении подвижного звена I в исходную позицию необходимо про(3)
водить выключение управляемой муфты 5 в точке с координатой vf i . Ин51
формация о текущем значении координа ты подвижного эвена Г поступает с выхода датчика 7 положения на вход блока управления, осуществляющего ее сравнение с фиксированным значением i{- В момент, когда f pji , блок управления вырабатывает сигнал на включение или выключение управляемой муфты 5.
Координаты выходных позиций должны удовлетворять условию
J;jfe f f- )
вытекающему из выражения (2) с учетом того, что
О tai (5)
02293и
Формула изобретения
Многопозицнонный манипулятор, со- , держащий смонтированное на основании звено с приводом его перемещения, два аккумулятора механической энерг. гии, управляемую муфту, установленную между одним из аккумуляторов и при10 водом, и блок управления, отличающийся тем, что, с целью упрощения конструкции, он снабжен датчиком положения звена, выход которого соединен с входом блока управ15 ления, при зтом другой аккумулятор механической знергии связан непосредственно с приводом этого звена.
8
| Манипулятор с программным управлением | 1978 |
|
SU733975A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
