Известны устройства для подъема и опускания конструкций, включающие опорную платформу и смонтированную на ней четырехзвеиную подъемно-рычажную систему, выполненную в виде шатунно-кривошипного механизма, шарнирно связанного с поднимаемой конструкцией и управляемого с помощью гидроцилиндров.
Особенностью описываемого устройства для подъема и опускания конструкций является то, что щатунно-кривощипный механизм соединен с платформой через стойку, средняя часть которой связана с подкосом, установленным на платформе и управляемым гидроцилиндром, а верхние и нижние концы соответственно закреплены на кривошипе и платформе, образующими второй четырехзвенный щарнирный мехапизл. Подкос выполнен в виде шарнирно соединенных между собой звеньев.
При такой конструкции устройства повышается надежность его работы и улучшаются эксплуатационные качества.
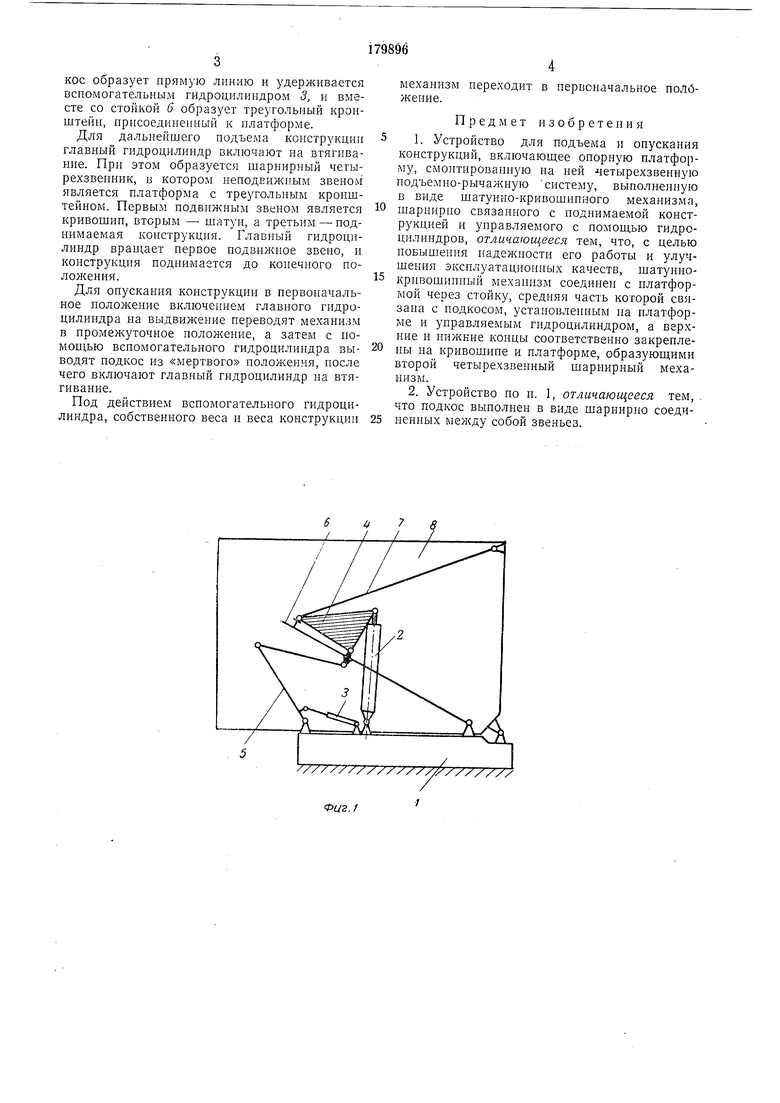
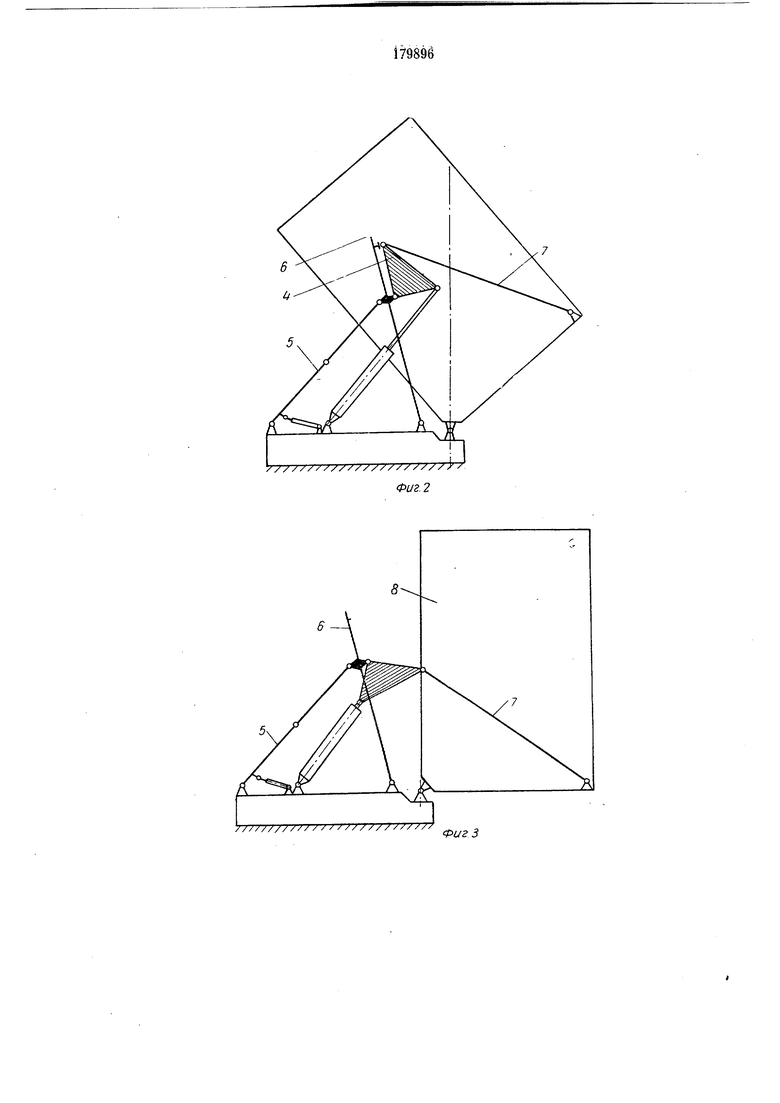
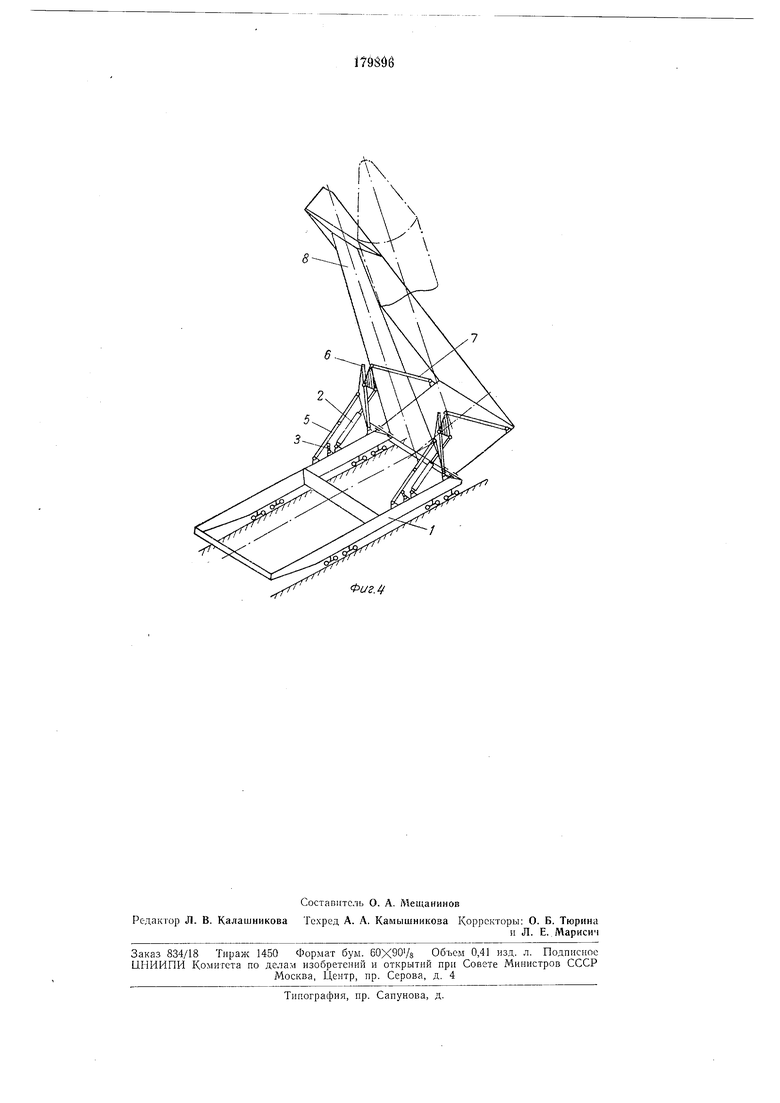
На фиг. 1 изображена кипематическая схема подъемного механизма в начальный момент подъема; на фиг. 2 - то же, в промелсуточном положении; на фиг. 3 - то же, в конечный момент подъема; на фиг. 4 - общий вид описываемого устройсгва в аксонометрии.
Шатупно-кривошипный механизм монтируется на платформе 1 и состоит из главного гидроцилиндра 2, вспомогательного гидроцилиндра 3, кривошипа 4, подкоса 5, стойки 6 и шатуна 7.
Главный гидроцнлиндр 2 шарнирно прикреплен к платформе и кривошипу, а вспомогательный гидроцилиндр 3 связан шарнирно с платформой и подкосом 5, вьшолнеиным в
виде двух шарпирно связанных звеньев и соединенным со стойкой 6. Стойка 6 одним концом прикреплена к кривошипу, а другим- шарнирно присоединена к платформе. Шатун 7 шарнирно присоединен к кривошипу и
к поднимаемой конструкции 8.
Принцип работы устройства заключается в следующем.
В исходном положении главный гидроцилиндр включается на выдвижение, при этом
образуется шарнирный четырехзвенник, в котором неподвижным звеном является платформа. Первое подвпжное звено образуется соедииенными между собой стойкой и кр1 вошипом. Вторым подвилчным звеном является
шатун, а третьим - поднимаемая конструкция. При включении на выдвижение главный гидроцилиндр вращает первое подвижное звено, в результате чего конструкция поднимается до промежуточного полол ения, изобкос образует прямую линию и удерживается вспомогательным гидроцилиндром 3, и вместе со стойкой 6 образует треугольный кронштейн, присоединенный к платформе.
Для дальнейшего подъема конструкции главпый гидроцилипдр включают на втягивание. При этом образуется шарнирный четырехзвеппик, в котором неподвижным звеном является платформа с треугольным кронштейном. Первым подвижным звеном является кривошип, вторым - шатун, а третьим - подпимаемая конструкцня. Главный гидроцилиндр вращает первое подвижное звепо, и конструкция поднимается до конечного положения.
Для опускания конструкции в первоначальпое положение включением главного гидроцилиндра па выдвижение переводят механизм в промежуточное положение, а затем с помощью вспомогательного гидроцилиндра выводят подкос из «мертвого полол ;еиия, после чего включают главный гидроцилиндр на втягивание.
Под действием вспомогательного гидроциликдра, собственного веса и веса конструкции
механизм переходит в первоначальное положение.
Предмет изобретения
1.Устройство для подъема и опускания конструкций, включающее опорную платформу, смонтироваппую на ней четырехзвенную подъемно-рычажную систему, выполненную в виде шатунно-кривошипного механизма, шарпирно связанного с поднимаемой конструкцией и управляемого с помощью гидроцилиндров, отличающееся тем, что, с целью поБЫшепия надежности его работы и улучшения эксплуатационных качеств, шатуннокривошиппый механизм соединен с платформой через стойку, средняя часть которой связана с подкосом, установленным на платформе и управляемым гидроцилиндром, а верхние и нижние концы соответственно закреплены па кривошипе и платформе, образующими второй четырехзвенный шарнирный механизм.
2.Устройство по п. 1, отличающееся тем, что подкос выполнен в виде шарнирно соедипенных между собой звеньев.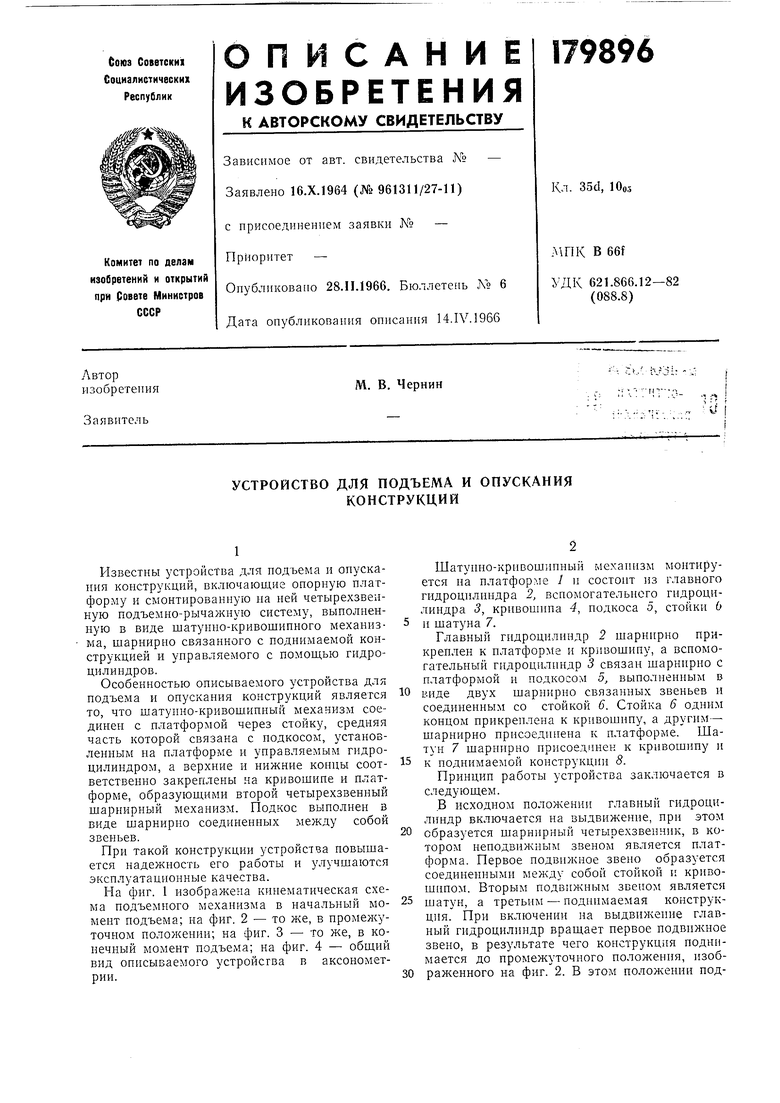
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728851C1 |
| ПЕРЕДВИЖНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1997 |
|
RU2137700C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 1998 |
|
RU2152486C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| Механизм уборки концов кокса с обслуживающей площадки машинной стороны коксовой батареи | 1960 |
|
SU141137A1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2009969C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| ПОДЪЕМНО-ПОВОРОТНЫЙ СТОЛ | 1967 |
|
SU202044A1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2737012C1 |
6
Фиг 3
Фиг.
