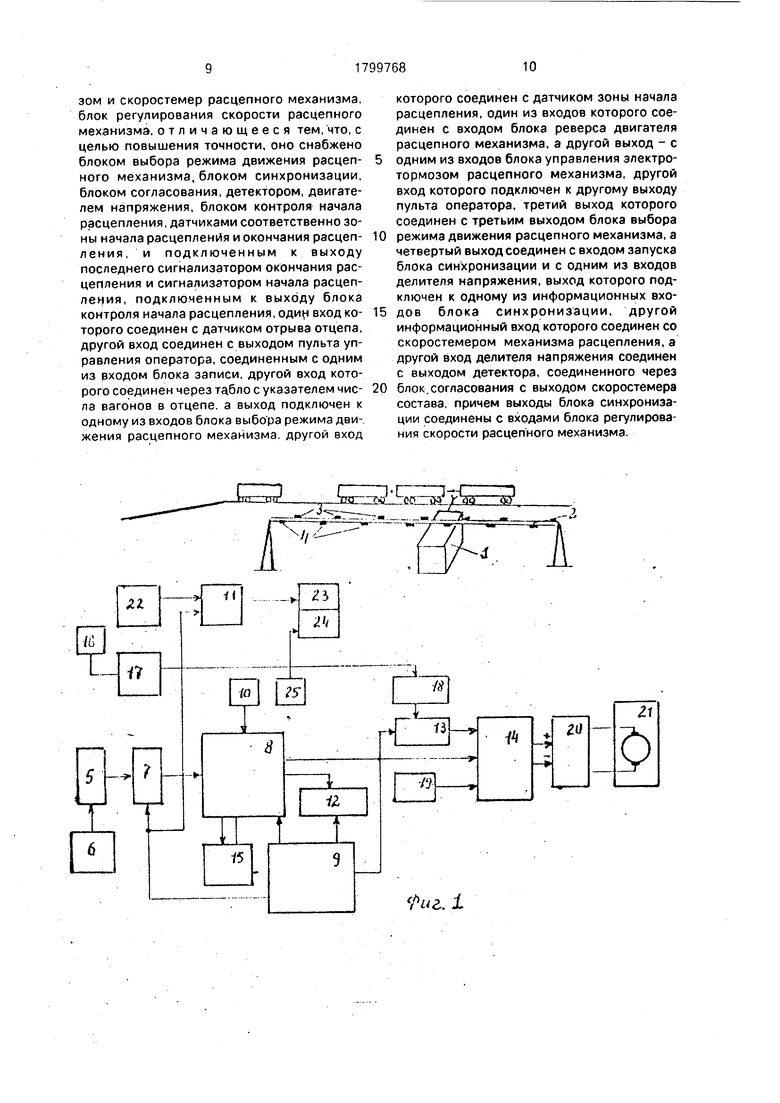
блока регулирования скорости расцепного механизма 20. В состав схемы управления входит также датчик 22 отрыва отцепа, выход которого через блок 11 контроля начала расцепления .связан с входом сигнализатора 23 начала расцепления, а выход датчика 25 окончания расцепления подключен к аналогичному сигнализатору 24 окончания расцепления.
Работа устройства протекает следующим образом.
До начала роспуска состава расцепной механизм 1 занимает на эстакаде 2 крайнее, ближнее к горбу горки положение, за пределами расцепления отцепа из одного вагона. После того информация о числе вагонов в первом отцепе поступит на указатель б числа вагонов в отцепе, она будет продублирована на табло 5 оператора-расценщика и посредством блока 7 записи числа вагонов в отцепе введена в блок 8 выбора режима движения расцепного механизма. Этот блок обеспечивает реверс двигателя, Оператор с пульта управления 9 включает блок 14 синхронизации и расцепной механизм 1 движется к точке начала зоны расцепления из i вагонов. В процессе движения датчик 10 зоны начала расцепа осуществляет подсчет числа указателей 3 точек зон начала расцепления. Разметка эстакады на зоны расцепления указателями 3 и 4 выполнена на основе многочисленных экспериментальных измерений. Координаты зон начала расцепления описываются уравнением
ZHi 11,8 9i, м,
ZH) - координата точки начала зоны расцепления, м,1i - число аагонов в отцепе.
Координаты размещения указателей 4 точек окончания расцепления описываются уравнением:
,2+7i.M
В момент времени, когда датчиком 10 зоны начала расцепления будет зафиксирован (И)-й указатель, блок 8 выбора режима движения расцепного механизма дает команду на включение блока 12 управления электротормозом. Здесь на расстоянии тормозного пути 1торм от i-ro указателя начала зоны расцепления механизм 1 стоит до тех пор, пока оператор не увидит автосцепку, которую нужно расцеплять. При этом оператор, в зависимости от скорости движения состава, решает в какой именно момент времени надо начать расцепление. Он включает,, когда сочтет нужным, блок 14 синхронизации и отключает на время расцепления выходы блока 8 выбора режима движения расцепного механизма.
Следует отметить, что реверс двигателя 21 выполняется блоком 15 реверса двигателя расцепного механизма сразу же при включении блока 12 управления электротормозом. С момента включения оператором блока 14 синхронизации расцепной механизм 1 разгоняется до скорости состава.. Синхронизация осуществляется путем сравнения скорости измеряемых скоростемером
19 расцепного механизма и скоростемером 16 состава. Для передачи сигналов о скорости состава на блок 14 синхронизации использованы модуль 17 сопряжения и детектор 18. На выходе детектора 18, как и
5 на выходе скоростемера 19 расцепного механизма, напряжение прямо пропорционально скорости движения каждого из этих объектов. Напряжение от скоростемера 19 поступает на блок 14 синхронизации непос0 редственно, а от детектора 18 через делитель напряжения. В исходном состоянии все напряжение с детектора 18 делится на 2,т.е. исходный уровень на выходе детектора 18 в два раза (при той же скорости) выше
5 уровня на выходе скоростемера 19 расцепного механизма.
Если оператору требуется догнать автосцепку, то он, нажимая педаль, изменяет коэффициент деления от 2 до 1 (плавно) и
0 блок 14 синхронизации обеспечивает нагон автосцепки. Далее оператор отпускает педаль и блок 14 синхронизации на все время расцепления обеспечивает синхронное движение расцепное механизма 1 и состава
5 (автосцепки). Если оператор не успел закончить расцепление до конца зоны отцепа из i вагонов, то срабатывает датчик 25 зоны окончания расцепа и включается сигнализатор 25 окончания расцепа о прекращении
0 (уже бесполезных, так как автосцепки растянуты) попыток расцепить вагоны.
Если он выполнил эту операцию до точки Zcki. то нажимает кнопку окончания расцепа на пульте 9 управления. По этой
5 команде в блок 8 выбора режима движения расцепного механизма вводится число вагонов следующего отцепа. Логика работы этого блока такова, что гарант ируется минимум перемещений расцепного механизма 1 по
0 эстакаде 2. Так, если число вагонов I первого отцепа меньше или равно числу вагонов j второго отцепа, то блок 8, получив сигнал окончания расцепления, включает блок 12 управления электротормозом, делает ре5 вере механизма горизонтального перемещения и отводит кабину в точку ZHj. Причем скорость движения кабины к зоне очередного расцепления (ZHj) прямо пропорциональна скорости движения состава. Действительно, блок 14 синхронизации
сравнивает абсолютные значения скорости состава и расцепного механизма без учета направления их движения. Тем самым гарантируется своевремеж.ый выход к началу зоны.расцепления. После выхода за точку ZH| по сигналу от датчика 10 зоны начала расцепления кабина останавливается и производится реверс двигателя механизма горизонтального перемещения. Однако оператор не имеет права сразу же присту- пать к расцеплению, пока от датчика 22 отрыва отцепа через блок 11 контроля начала расцепления не будет включен сигнализатор 23 начала расцепления. Включение этого сигнализатора подтверждает отрыв предыдущего отцепа и дает разрешение на расцепление следующего.
В том случае, когда число вагонов i предыдущего отцепа было больше числа вагонов отцепа, который предстоит рас- целить алгоритм работы блока 8 изменяется. Блок 8 после получения сигнала окончания расцепления включает блок 12 управления электротормозом, а блок 15 реверса двигателя расцепного механизма не включается. После полного торможения расцепного механизма 1, если выполняется условие (), тормоза выключаются, но сам расцепной механизм остается в той же точке, где было закончено предыдущее расцеп- ление. Здесь оператор дожидается подхода автосцепки, которую следует расцепить. Порядком, описанным выше, оператор обеспечивает синхронность движения рас- цепного механизма 1 с составом и после регистрации датчиком 22 отрыва отцепа из i вагонов от состава по сигналу сигнализатора 23 начинает расцепление. При этом он не дожидается проследования точки7ц. Досрочно выполнив расцепление, оператор подает команду на окончание расцепления. В бло: 8 вводится число k вагонов в следующем отцепе, и цикл работы устройства повторяется.
После окончания роспуска состава one- pajop отводит кабину за точку ZOK.S, а при малом интервале между роспуском (параллельный надвиг) он может не снимать электропитание со схемы управления расцепным механизмом и дожидаться под- хода вагонов состава там. где закончил расцеплять предыдущий соста.
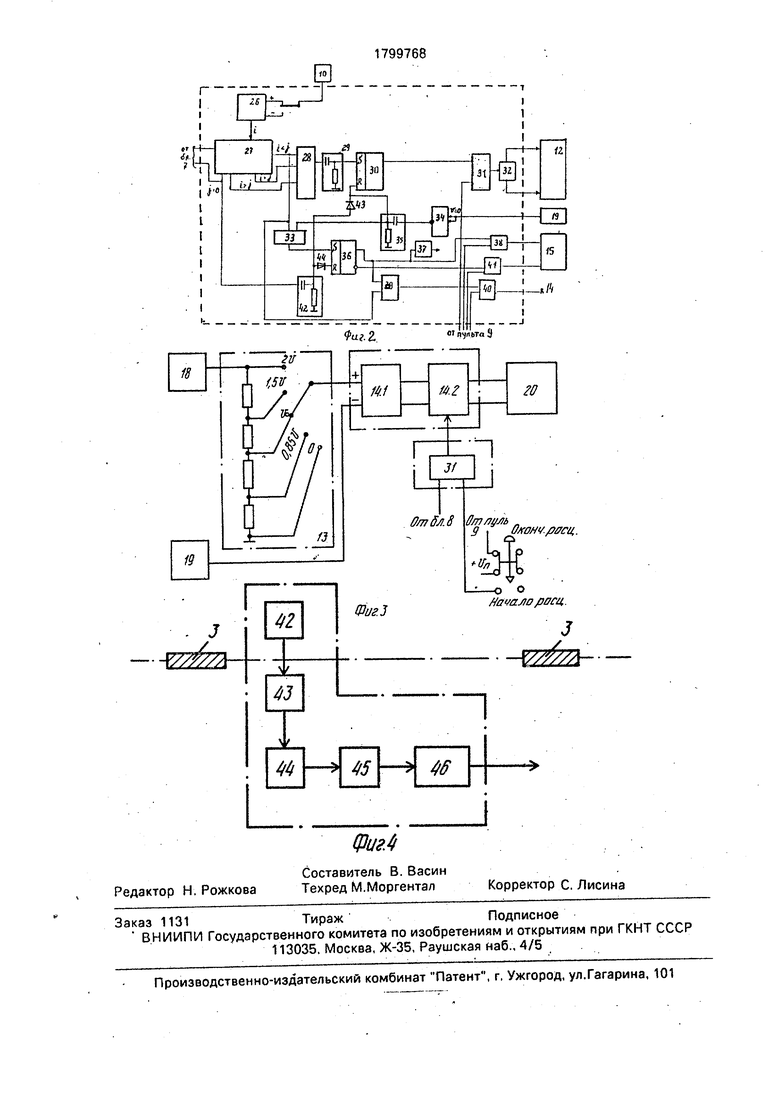
Как следует из описания работы данного устройства, наибольшее число функций выполняет блок 8 выбора режима движения расцепного механизма. Схема блока приведена на фиг.2
Блок & выбора режима движения расцепного механизма содержит реверсивный счетчик 26, подключенный к первой группе
входов схемы сравнения 27, ко второй труп пе входов этой схемы подключены выходы блока 7 записи числа вагонов в отцепе, три выхода схемы сравнения (если использовать схему К561ИП2, то их всего гри), соответствующие ситуациям , , , подключены к входам элемента ИЛИ 28, выход которого через дифференцирующую цепочку 29 связан с входом S RS-триггера 30, прямой выход которого через элемент ИЛИ 31 и электронный ключ 32 связан со схемой включения блока 12 управления электротормозов, выход (KJ) схемы 27 сравнения подключен также к одному входу элемента И 33, к другому входу которого через пороговый элемент 34 и дифференцирующую цепочку 35 подключен выход детектора скоростеме- ра 19 расцепного механизма, выход элемента И 33 подключен к входу S RS-триггера 36, к прямому выходу которого подключено реле 37, один вход элемента ИЛИ 38 и один вход элемента И 39, к другому входу последнего подключен также выход () схемы 27 сравнения, а выход подключен .к одному из входов элемента ИЛИ 40, инверсный выход упомянутого триггера подключен к одному из входов элемента ИЛИ 41, входы R двух упомянутых триггеров подключены через дифференцирующую цепочку и диоды 43,44 к выходу блока 7 записи числа вагонов в отцепе, входы реверсивного счетчика 26 через контакты 37.1 реле 37 связаны с вь(хо- дом датчика 10 зоны начала расцепления, к незздействованным входам двухвходовых элементов ИЛИ 31, 38, 40, 41 подключены выходы кнопок (на фиг.1 и 2 не показ-аны) пульта оператора: соответственно кнопки включения электротормоза, движения к горбу горки, обратное движение, включение блока синхронизации(она же кнопка начала расцепления).
Блок 8 выбора режима движения расцепного механизма работает следующим образом.
После окончания расцепления из i вагонов оператор отжимает кнопку окончания расцепления, при этом из блока 7 записи числа вагонов в отцепе в схему сравнения поступает новое число j. которое сравнивается с числом i, введенным от реверсивного счетчика 26. При этом на одном из упомянутых выходов (, , ) схемы 27 сравнения появится сигнал высокого уровня. Поскольку выхода схемы 27 объединения через элемент ИЛИ 28, то независимо от сложившейся ситуации на входЗ RS-триггера 30 через цепочку 29 поступит импульс высокого уровня. Триггер перейдет в состояние 1, соответственно высокого уровня. Триггер перейдет в состояние 1 соответственно на входе элемента ИЛИ 31 и электронного ключа 32 будет сформирован сигнал высокого уровня. Электронный ключ 32 открывается и замыкается цепь питания блока 12 управления электротормозом. На- 5 чинается торможение расцепного механизма 1. После полной остановки расцепного механизма 1 на выходе порогового элемента 34, подключенного к выходу скоростеме- ра 19, появится сигнал высокого уровня, 10 который через дифференцирующую цепочку 35 воздействует на один вход элемента И 33, а также на вход R RS-триггера 30, который переводится в состояние О, электрон- в ный ключ 32 закрывается, расцепной 15 механизм 1 растормаживается. Если местоположение расцепного механизма 1 соответствует ситуации , , то каких-либо воздействий на двигатель со стороны блока 8 выбора режима движения расцепного ме- 20 ханизма не происходит. Оператор дожидается, пока требуемая автосцепка не подойдет к расцепному механизму и, нажав кнопку начала расцепления на пульте управления 9, переводит расцепной механизм 25 в режим синхронного движения с составом. Иначе работает схема, если . В этом случае на второй вход элементы И 33 поступает напряжение уровня 1 с выхода (KJ) схемы сравнения 27, соответственно на вы- 30 ходе эпемента И 33 будет сформирован импульс, который переведет триггер 36 в состояние 1. Сигналом высокого уровня с прямого выхода триггера 36 включается реле 37 и через элемент ИЛИ 38 поспедством 35 блока 15 реверс двигателя расцепного механизма изменяется направление движения расцепного механизма 1. По сигналам высокого уровня с выхода () схемы 27 сравнения и с прямого выхода триггера 36 схема М 40 39 формирует сигнал высокого уровня, который через элемент ИЛИ поступает 40 на вход включения схемы 14 синхронизации. С этого момента расцепной механизм 1 начинает движение от горба горки к точке ZHJ. 45 Поскольку реле 37 возбудилось, то через фронтовые контакты 37.1 импульсы с датчика 10 зоны начала расцепления будут поступать на вход суммирования реверсивного счетчика 26. При проследовании расцепным 50 механизмом 1 мимо каждого из указателей 71H-Znn происходит увеличение содержимого счетчика 26 на единицу. В момент.когда расцепной механизм 1 будет проходить мимо указателя ZJH, сигнал на выходе () из- 55
пенится с 1 на О, на выходе элемента И 39 появится сигнал О, блок синхронизации 14 будет выключен. Одновременно импульсом положительной полярности с выхода () через элемент ИЛИ 28 и дифференцирующую цепочку 29 будет переключен триггер 30 в состояние 1 и соответственно включен блок 12 управления электротормозом. Расцепной механизм 1 будет заторможен на расстоянии (Торм от точки ZHj.,
Поскольку возврат расцепного механизма к началу зоны ZHJ производится со скоростью, равной скорости состава, то гарантируется своевременный выход кабины оператора к началу зоны расцепления.
На фиг.З приведена схема синхронизации и делителя напряжения, функционирование которой описано выше.
На фиг.4 изображена схема датчика 10 зоны начала расцепления (он аналогичен датчику зоны окончания расцепления). Датчик содержит излучатель 42, размещенный на одной оси с фотоприемником 43, который подключен через усилитель 44 и дискриминатор длительности 45 к входу формирователя импульсов 46. Выход формирователя импульсов 46 - это и есть выход датчика 10 зоны начала расцепления.
Работа датчика 10 протекает следующим образом.
В процессе движения расцепного механизма 1 между излучателем 42 и фотоприемником осуществляется непрерывная оптическая связь, которая нарушается при движении через точку начала зоны расцепления. В этой точке в пространство между излучателем 42 и фотоприемником 43 входит непрозрачная пластина указателя 3 координаты начала расцепления. Если оптическая связь нарушена, то это регистрирует дискриминатор длительности 45, сигналом которого включается формирователь импульсов 46. Дискриминатор 45 необходим для защиты от помех малой длительности, а формирователь импульсов обеспечивает стабильность выходных импульсов датчика 10 независимо от погодных условий и скорости движения расцепного механизма 1. Датчики 10 и 25 и соответствующие им указатели 3 и 4 пространственно разнесены, что позволяет использовать идентичные схемы датчиков без ущерба для надежности их работы.
Ф о р м ула изобретения
Устройство для расцепления вагонов состава, содержащее установленный на эстакаде с возможностью перемещения вдоль нее расцепной механизм, пультуправления, табло оператора, скоростемер состава, датчик отрыва отцепа, блок записи числа вагонов .в отцепе, указатель.числа вагонов в отцепе, блок реверса двигателя расцепного механизма, блок управления электротормозом и скоростемер расцепного механизма, блок регулирования скорости расцепного механизма, отличающееся тем, что, с целью повышения точности, оно снабжено блоком выбора режима движения расцепного механизма,блоком синхронизации, блоком согласования, детектором, двигателем напряжения, блоком контроля начала расцепления, датчиками соответственно зоны начала расцепления и окончания расцеп- ления, и подключенным к выходу последнего сигнализатором окончания расцепления и сигнализатором начала расцепления, подключенным к выходу блока контроля начала расцепления, один вход которого соединен с датчиком отрыва отцепа, другой вход соединен с выходом пульта управления оператора, соединенным с одним из входом блока записи, другой вход которого соединен через табло с указателем числа вагонов в отцепе, а выход подключен к одному из входов блока выбо ра режима дви-. жения расцепного механизма, другой вход
которого соединен с датчиком зоны начала расцепления, один из входов которого соединен с входом блока реверса двигателя расцепного механизма, а другой выход - с
одним из входов блока управления электротормозом расцепного механизма, другой вход которого подключен к другому выходу пульта оператора, третий выход которого соединен с третьим выходом блока выбора
режима движения расцепного механизма, а четвертый выход соединен с входом запуска блока синхронизации и с одним из входов делителя напряжения, выход которого подключен к одному из информационных входов блока синхронизации, другой информационный вход которого соединен со скоростемером механизма расцепления, а другой вход делителя напряжения соединен с выходом детектора, соединенного через
блок,согласования с выходом скоростемера состава, причем выходы блока синхронизации соединены с входами блока регулирования скорости расцепного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСЦЕПЛЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2020 |
|
RU2732676C1 |
| Устройство для расцепления вагонов | 1980 |
|
SU977254A1 |
| СИСТЕМА АВТОРАСЦЕПКИ ВАГОНОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2010 |
|
RU2450946C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РАСЦЕПЛЕНИЯ АВТОСЦЕПОК ДВИЖУЩИХСЯ ВАГОНОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2728968C1 |
| УСТРОЙСТВО АВТОРАСЦЕПКИ ГРУЗОВЫХ ВАГОНОВ | 2008 |
|
RU2379206C1 |
| Устройство для определения момента отделения отцепа от состава на сортировочной горке | 1985 |
|
SU1284873A1 |
| ГОРОЧНОЕ ПРОГРАММНО-ЗАДАЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2157773C2 |
| Устройство для расцепления железнодорожных вагонов | 1979 |
|
SU872352A2 |
| Напольное устройство для автоматического расцепления единиц подвижного железнодорожного состава | 1982 |
|
SU1084164A2 |
| Устройство для расцепления железнодорожных вагонов | 1981 |
|
SU960059A1 |
Редактор Н, Рожкова
Составитель В. Васин Техред М.Моргентал
Корректор С. Лисина
