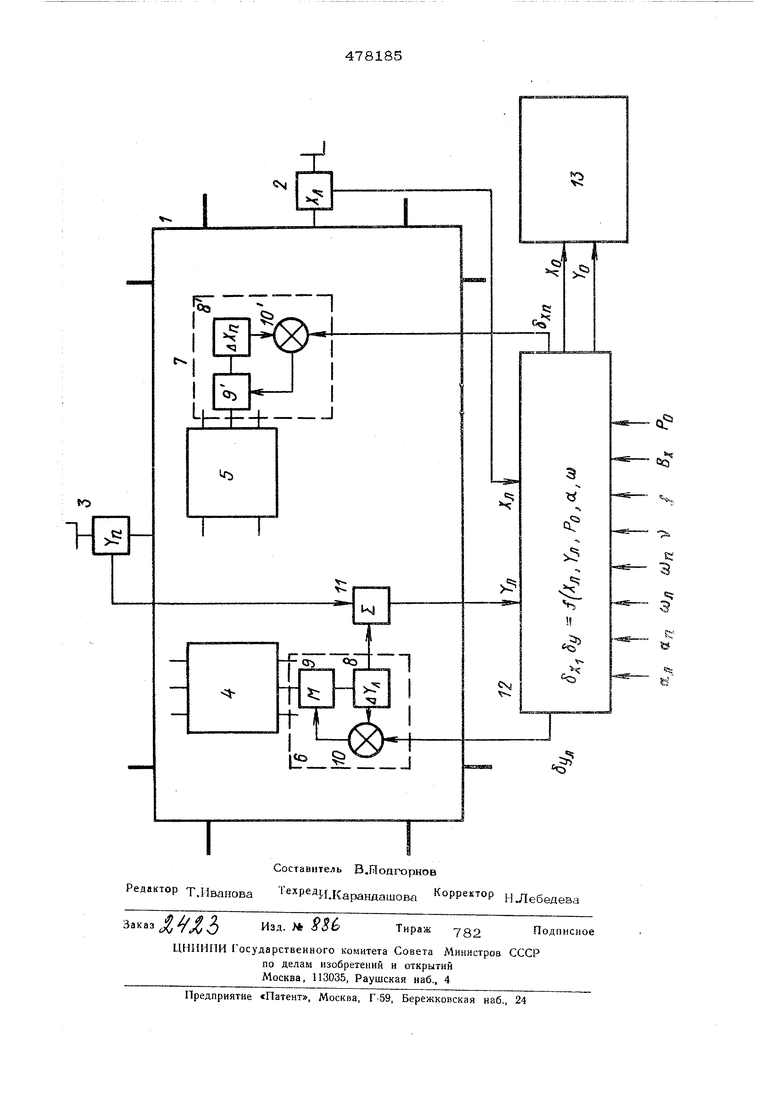
Изобрете1ше относится к области фотограмметрии, в частности к фотограмметрическому приборостроению. Целью изобретения являются повышение регистрирующей точности аналитического фотограмметрического прибора и упрощенна его конструктивной схемы. Указанная цель достигается тем, что выход датчика обратной связи следящего привода одной из параллактических кареток связан с одним из входов суммирующего устройства, другой вход которого связан с выходом датчика координаты соответствующей каретки совместного движения, а выходной сигнал сумматора поступает на упра ляющий вход вычислителя, замыкая тем сагмым контур обратной связи с вь1хода корректирующей системы на ее вход. На чертеже представлена блок-схема аналитического фотограмметрического прибора. Прибор состоит из стереокомпаратора 1 с кареткой совместного движения снимков. Перемещение этой каретки по направляющим X и У осуществляется оператором вращением штурвалов, на оси которых установлены цифровые датчики 2 и 3. Снимки стереопары расположены на параллактических каретках; левый - на каретке - 4, правый- на каретке Р-5. Введение корректирующих поправок в каждый из снимков осуществляем ся блоками слэдящих приводов 6 и 7. Следящий привод включает в себя цифровой датчик координат (81), двигатель с схемой управления 9 (9), сравнивающий элемент 1О (1О1). Входы сумматора 11 связаны с выходаь ми датчиков координат А Y п п его выход с одним из входов вычислительного устройства 12, который по текущим значениям координат Х- и Y. Д Y а также установочным значениям эпемеитов взаимного и внешнего ориентироваш1Я находит величины корректирующих поправок Д X j и А YH В комплект прибора входит автомати- ческий координатограф 13. Фувкщюкироьшше анадитического прибо ра осущас-гШ1яетс.я следуюищм образом. При ь аблюдении идентичных точек сю1ьшов на стересйсой-шараторе с совмесп-ш м , жштием ooojix САШМКПВ п параллактически мл смещешшлгн Р и f; 5 отнесенными к разлЬдМ ciiiiMscaM стереопары (схема стеко метра).датчй1ш 2 и 3, связанные со штур валалЩ измеряют нетрансформированные кос рдина ;Ы идентичных точек X - левого с-щьмка- а Y правого склмка стерео- парь отно ;ит8льыо глгзвньа.х точек снимкоВд а отсчеть; патчикоБ &К и дУ величи- : п-Ji iibi ссатветствующих координатных составяшолкцх кгдарел-:з1ру1ощях поправок за перспек кйз.шлде и MsciiiTaOiibJe искажехшя обоих атмков.. а тажже ародольлый параллакс наблюдаемой точки „ - координаты ыяе тичгjiJbix, точек на двух спкмках стереопары -- ссгСтавляющие перспе TMBJUaix и .масштабны искя аеыий сш1мков| ™ тр ансфор jviiip ованный :чродоль.сый параллакс з/двисимости для Sx и -v нродставлшог собой дробноршшон шьи функции и молут быть лсгко йырйженЬ че™ рез -шординать точек одишО из (лшмков стерлопары и элементы вааьмлого л внешне о ор ие j iTHp ова1шя, Ввсщя следующую иодетгиовку: СА),Р и Ар.) - -р / V V 4- V -111 :2) Ь ypaBifeHHH 1 nepeMeniibie разделен, oj-райотка корректирующего воздей ствия (ожет быть осуществлена обычным слйД5ащ1м приводом после подачи на его KiOfi упрсшляющехо воздействия, Реше1ше ypuBiseHiui (.2) относительно ДУ л т е„ разделйине ере.)енных- приводит к чрезвы чайно громоздким вычислениям и трудно реализуемому алгоритму вычислительного го устройства, В связи с этим с целью упрощекня вычислительного устройства предпагаеася в аналитическом приборе ре шать автоматически это уравнение в неявном виде путем охвата всей системы корре1шии дополнительной обратной связью с выхода следящего привода пара шактиче- ской каретки на утфавляюищй вход вычнолителя. Решение уравнения (2) относительно д Y может быть осуществлено автоматически в следящем режиме, если сиг-нал с выхода датчика обратной связи ДТ следящего привода параллактической каретки nocTjTiaeT на вход сравнивающего уст ройства для отработки рассогласования, а также на один из входов сумматора, другой которого связан с датчиком координаты Y совместного движения, а выходной сумматора,соответствующий величине Yr, Д УПпоступает на управляющий вход вычислитчэля. Таким образом текуя1еее изменеы1е значения коррекД Y передается па тирующей поправки л управляющий вход системы KoppeKmmj т. е, па вход вычислителя в виде текущего значения координаты Yn - Д Ynнаблюдаемой точки левого снимка. При настройке вычислителя на алгоритм с входны ми координатами снимка стереопары на выходе следящего привода в устаг-, иовившемся режиме будет иметься реше- зше уравнения (2). Следует отметить, что Б npCAjiai acMOM приборе за исход1 ые значения пeтpaнcфop шpoвaнныx координат возмо кло выбирать как и XY iS последнем случае выход дат--шка должен быть связан с од1шм входом сумматора, а на другой его вход бу- I дет поступать сигнал датчика обратной связи Д X . п Работа на предлагаемом приборе будет ансшогична работе на универсальном приборе с подобными связками, так как после выполнедшя операш й взаимного и внешнего ориентировшшя в поле зрения наблюдаемой системы будут отсутствовать разности поперечных паршшаксов для любой точки cifflMKa, Иредлаа аемый вариант конструктивной схемы аналитического прибора имеет ряд преимуиюств перед известшзми аналитическими приборами.
1.Введение корректируюидах поправок ДХ } ДУ в виде разности поправок
обоих снимков за перспективные и масштабные искажения, а также продольный параллакс наблюдаемой точки позволило испошгзовать стереокомпаратор с совместным перемещением обоих С1ШМКОВ. Такая схема дает возможность не предъявлять высоких требований к точности отсчетов и направляющих совместного движения С1шмков.
2.Дальнейшее упрощение конструктивной схемы достигается за счет введения составляющих корректирующих поправок йХ, д Y в разные снимки стереопары. Это
дает возможность уменьшить этажность стереокомпаратора, сделать его конструкШ1Ю более жесткой и стабильной.
3.Уменьшено вдвое по сравне1шю с известны Nm аналитическими приборами количество дорогостоящих блоков следящего привода. Введение разности корректирующи поправок двух снимков одним следящим приводом повышает результирующую точность коррекш1и в V раз и позволяет одновременно снизить требовашш к его быст родействию.
Указанные особенности конструктивной схемы делают ее экономически более целесообразной по сравнеш1ю с известными аналитическими приборами при топографическом картографировании страны.
Предмет изобретения
Аналитический универсальный стереофотограмметрический прибор, содержащий стереокомпаратор с кареткой совместного движения снимков и параллактическими каретками, снабженными следящим;- приводом и датчиками обратной связи, суммируюп1ее устройство, автоматический координатограф,цифровое вычислительное устройство и сравнивающее устройство, о т л и ч аю щ и и с я тем, что, с целью повышения точности и упрощения конструктивной схемы прибора, выходы каждого из датчиков обратной связи следящего нривода ntvраллактических кареток связаны с соответствующим входом сумкшрующего yci ройства, другой вход которого связан с выходом датчика координаты каретки совместного движе1шя, а суммирующего устройства связан с управляющим входом цифрового вычислительного усаройства.
1
5
«
Э
С: Ь
fcs
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналитический стереофотограмметрический прибор | 1991 |
|
SU1800267A1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| СПОСОБ СОЗДАНИЯ ПЛАНОВО-ВЫСОТНОГО ОБОСНОВАНИЯ | 1994 |
|
RU2104488C1 |
| Способ обновления карты,созданной по аэрофотоснимкам | 1984 |
|
SU1216648A1 |
| Способ обновления топографической карты, созданной по аэрофотоснимкам | 1990 |
|
SU1797689A3 |
| ПРИБОР ДЛЯ ОБРАБОТКИ МАТЕРИАЛОВ НАЗЕМНОЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКОЙ СЪЕМКИ | 1967 |
|
SU192419A1 |
| СТЕРЕОАВТОГРАФ | 1971 |
|
SU309241A1 |
| СТЕРЕОКОМПАРАТОРii44S»Rf-'iG'^i t^KA | 1971 |
|
SU322616A1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1991 |
|
RU2012845C1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |