Известный способ автоматического точного останова электропривода, например подающих роликов, для мерного пореза полосы гильотинными ножницами ие обеспечивает достаточного быстродействия либо достаточной точности.
Предлагаемый способ останова повышает быстродействие останова и обеспечивает его высокую точность независимо от величины скорости и статического момента перед остановом, для чего привод переводят сначала на пониженную скорость, а затем при помощи датчика или вычислительного устройства, учитывающих положение полосы и скорость привода, подают команду на срабатывание быстродействующего тормоза, выполненного, например, с электромагнитным спусковым механизмом и осуществляющего окончательный останов привода.
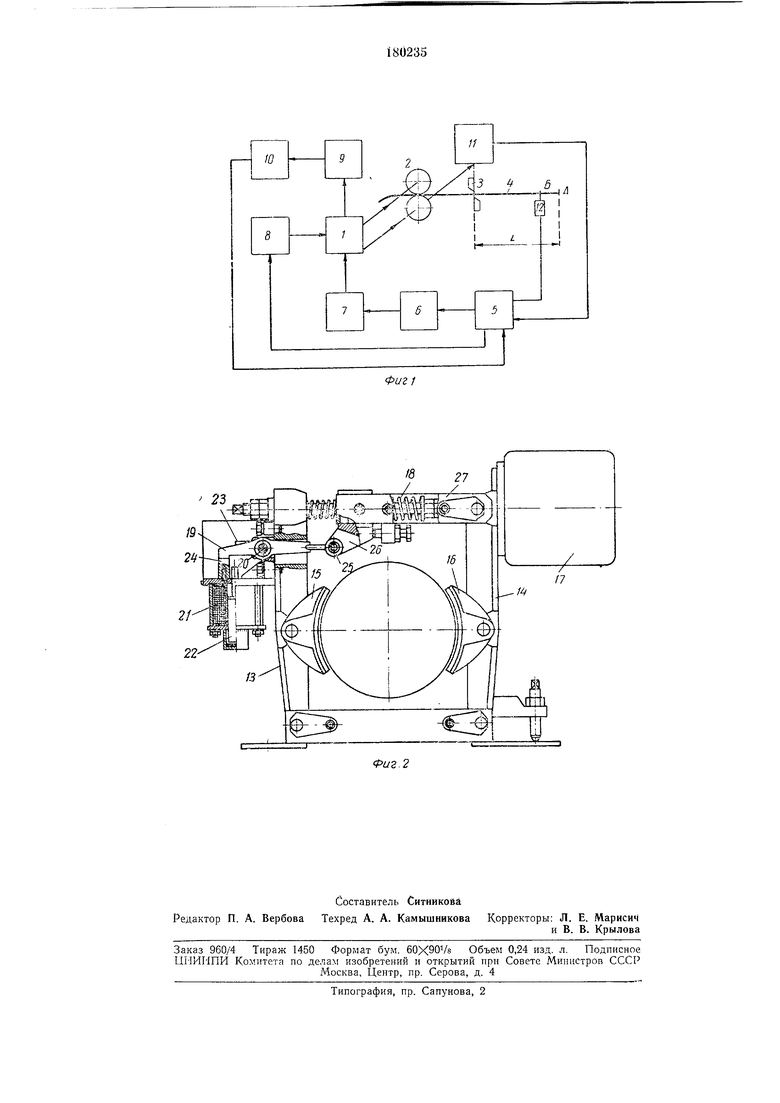
На фиг. 1 приведена блок-схема устройства, служащего для осуществления предлагаемого способа; на фиг. 2 - вид этого устройства спереди с частичными разрезами тормоза.
Электродвигатель 1 приводит во вращение подающие ролики 2, установленные перед ножницами 3. Расстояние от линии реза до заданной точки А останова составляет заданную длину листа L, отрезаемого от полосы 4. Зависимость тормозного пути 1т, пройденного полосой от начала торможения до останова, от
скорости враЩ.ения двигателя п и тормозного момента Мг привода выражается уравнением
k IT
-, где к - коэффициент пропорциоМ,
нальности.
Вычислительный блок 5 в соответствии с этим уравнением определяет момент подачи команды через систему управления 6 и генератор 7 на отключение питания двигателя / Н включение электромагнита спускового механизма тормоза 8, затормаживающего электродвигатель /. Необходимая информация в блок 5 подается от соответствующих датчиков.
Скорость привода п измеряется тахогенератором 9 и возводится в квадрат квадратором JO. Тормозной путь IT определяется следующим образом. С валом одного из подающих роликов кинематически связан фотоэлектрический
датчик импульсов 11, выдающий один импульс на 1 мм перемещения полосы. В непосредственной близости от точки останова в заданной точке Б установлен датчик 12, контролирующий полол ение кромки полосы.
Если, например, мм, в момент достижения полосой точки Б счетная схема, собранная из двух декад на декатронах, скачком выдает напряжение, соответствующее 100 мм. По мере дальнейшего движения полосы это мент, когда величины напряжений, соответствующие левой и правой части уравнения будут равны, в схеме сравнения возникает импульс на окончательное затормали-шание. Благодаря большому быстродействию тормоза и большому тормозному моменту двигатель интенсивно тормозится и останавливается, обеспечивая заданную длину листа. Быстродействие тормоза обеспечивает его конструкция (фиг. 2). Обычный колодочный тормоз, содержаш,ий рычаги 13 и 14 с колодками /5 и 16, привод 17 и тормозную пружину 18 дополнен быстродействуюш;им электромагнитным снусковым механизмом, состоящим из рычага 19, качающегося на оси 20, электромагнита 21 с сердечником 22. Когда тормоз расторможен, рычаг 19 под действием пружины 23 поворачивается против часовой стрелки до упора 24. Наконечник рычага 19 упирается в ролик 25 на уноре 26, укрепленном на скобе 27. Когда в электромагнит 21 подается электрический импульс, то сердечник 22 втягивается с большой скоростью и ударяет по рычагу 19, который поворачивается по часовой стрелке и освобождает ролнк 25. Под действием тормозной пружины 18 тормоз затормаживается. Необходимая точность обеспечивается независимо от величины пониженной скорости привода, так как по всей скорости определяется момент подачи команды на торможение. Независимость точности останова от величины активного статического момента достигается вУбором величины тормозного момента тормоза значительно большей, чем величина статического момента. Возможен и схемный учет величины Мг в уравнении. В том случае, когда величина пониженной скорости привода перед остановом весьма мала, например менее 5% номинальной, удовлетворительная точность останова может быть получена, если вместо вычислительного блока 5 использовать сигнал непосредственно датчика 12., контролирующего положение кромки полосы перед самым ее остановом. Предмет изобретения Способ автоматического точного останова электропривода, например подающих роликов, для мерного пореза полосы гильотинными ножницами, отличающийся тем, что, с целью повышения быстродействия и обеснечения высокой точности останова независимо от величины скорости и статического момента перед остановом, привод переводят на пониженную скорость, а затем при помощи датчика или вычислительного устройства, учитывающих положение полосы и скорость привода, подают команду на срабатывание быстродействующего тормоза, выполненного, например, с электромагнитным спусковым механизмом и осуществляющего окончательный останов привода.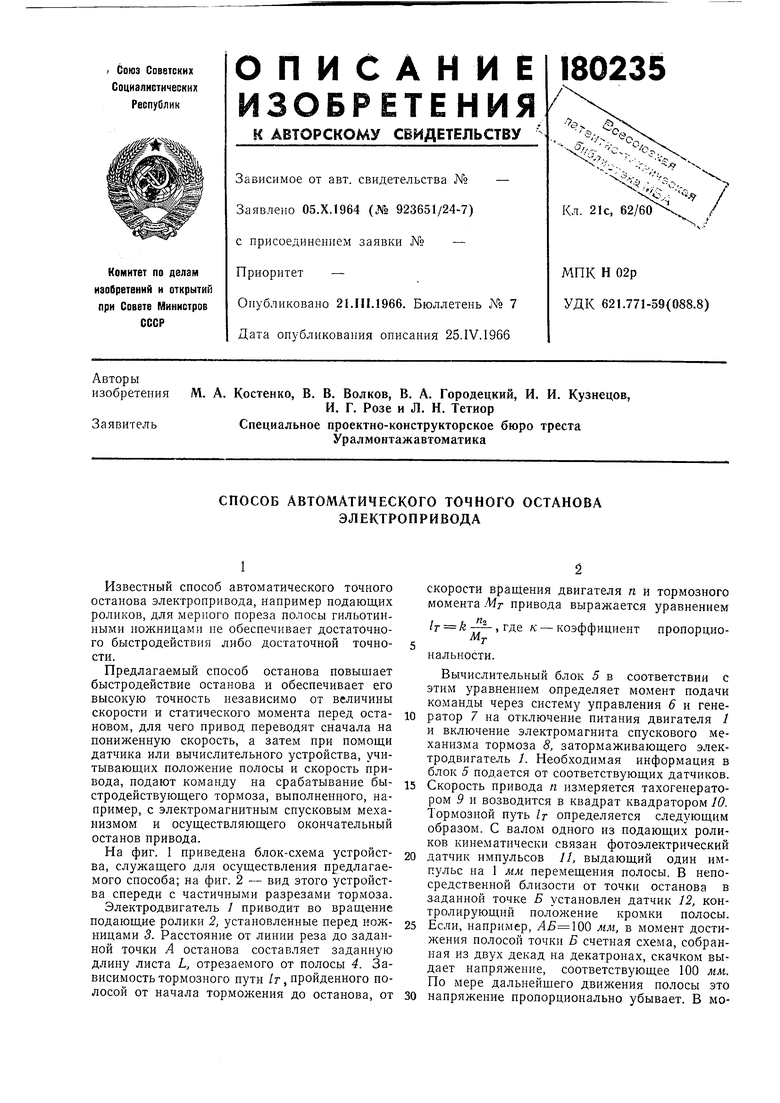

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ТОРМОЗ | 1968 |
|
SU211241A1 |
| Автоматическая линия раскроя листового материала на прямоугольные заготовки | 1979 |
|
SU872056A1 |
| УСТРОЙСТВО ДЛЯ ПУСКА И ОСТАНОВА БАЛАНСОВОГО ОСЦИЛЛЯТОРА СЕКУНДОМЕРА | 1972 |
|
SU427312A1 |
| Способ управления приводом летучих ножниц и устройство для его осуществления | 1990 |
|
SU1764865A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОСТАНОВА МОТАЛКИ ЛИСТОПРОКАТНОГО СТАНА | 1969 |
|
SU246450A1 |
| Устройство автоматического пореза переднего конца полосы | 1976 |
|
SU747631A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОСТАНОВА КЛЕТЬЕВОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1967 |
|
SU201615A1 |
| Устройство управления безупорным остановом полосы металла | 1974 |
|
SU533411A1 |
| Устройство для подачи и точного останова лесоматериалов на раскряжевочных установках | 1987 |
|
SU1451012A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СВАРОЧНОЙ МАШИНОЙ | 2000 |
|
RU2183539C2 |