;. Фи&2
нитного и неэлектропроводящего материала, с дискретно увеличивающимися коэффициентами трения материалов рабочего кольца и инерционного элемента 2 от центрального кольца к наружному. Для возвращения датчика в исходную позицию служит электромагнит 3. При превышении заданного порогового значения виброускорения сила инерции, прикладываемая к инерционному элементу 2, превышает силу трения и вызывает его движение от центра рабочего кольца к периферии. При достижении периферии рабочего кольца инерционный элемент 2 замыкает контактную пару 4, и выдается сигнал в систему сигнализации или управления о достижении предельного технического состояния контролируемого объекта. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления пространственным разворотом объекта | 1989 |
|
SU1679467A1 |
| Следящий измеритель частоты | 1991 |
|
SU1800615A1 |
| Трехстепенный маятниковый гирокомпас | 1991 |
|
SU1809306A1 |
| Способ учета ресурса двигателя | 1991 |
|
SU1825428A3 |
| Способ измерения амплитуды механических колебаний объекта | 1989 |
|
SU1791727A1 |
| Устройство управления динамическим объектом с присоединенным упругим элементом | 1989 |
|
SU1767477A1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| ВИБРАЦИОННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО | 1996 |
|
RU2121954C1 |
| Устройство для измерения манипулированных сигналов | 1990 |
|
SU1760469A1 |
| Тензометрическое устройство | 1990 |
|
SU1758414A1 |
Использование: изобретение относится к Еиброизмерениям и предназначено для расширения функциональных возможностей датчика за счет дискретной фиксации .монотонно возрастающих виброускорений. Сущность: вибрационный пороговый датчик , содержит цилиндрический корпус из немагнитного материала, размещенные в нем инерционный элемент 2 в виде диска из магнитного электропроводящего материала, фиксатор его начального положения в виде электромагнита 3 и контактных пар 4. Датчик снабжен набором жестко связанных между собой соосных рабочих колец возрастающего диаметра, выполненн ыхиз немаг ел С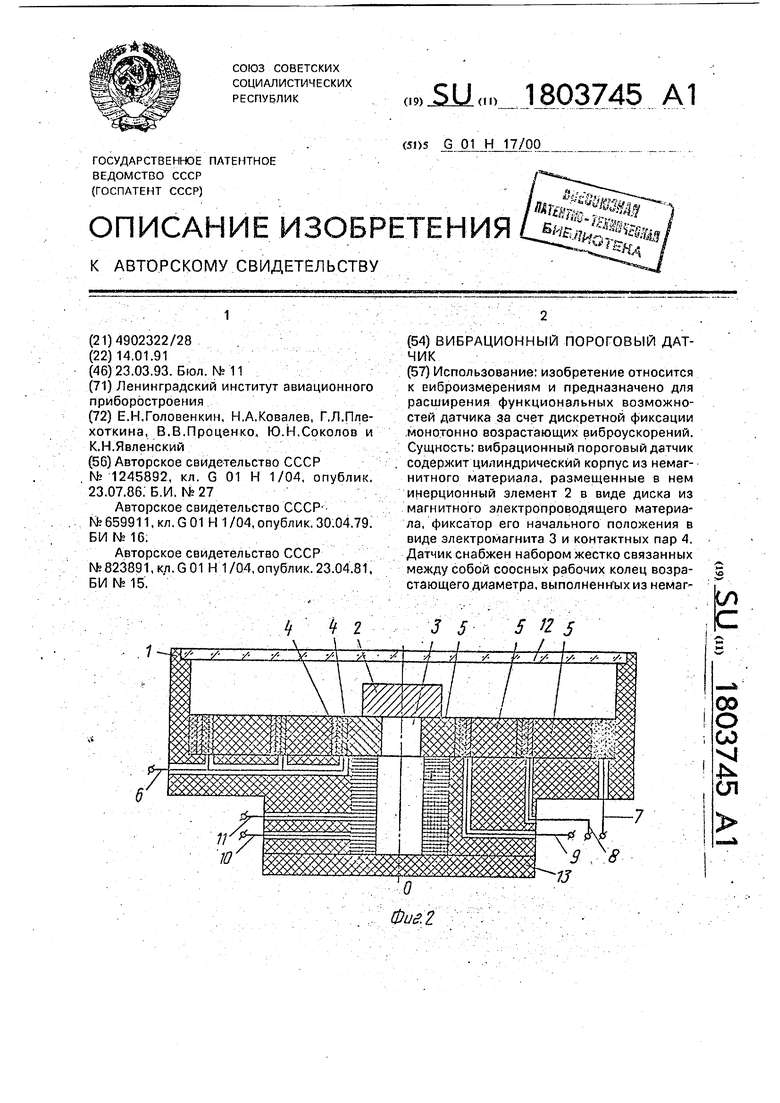
Изобретение относится к области виброизмерений и предназначено для использования в качестве фиксатора достижения агрегатами сложных механических систем предельных технических состояний.
Целью изобретения является расширение за счет дискретной фиксации монотонно возрастающих ускорений и повышения его надежности.
Цель изобретения достигается тем, что датчик снабжен п рабочими кольцами, выполненными из немагнитного и неэлектропроводного материала, коаксиально размещенными в цилиндрическом корпусе относительно его оси и связанными друг с другом кольцевыми прокладками, выполненными из электропроводного материала, инерционный элемент выполнен в виде размещенного на центральном рабочем кольце с возможностью последовательного взаимодействия с п-1 рабочими кольцами диска диаметром D, удовлетворяющим соотношению , где di, d2 - соответственно внутренний и наружный диаметр центрального рабочего кольца, коэффициенты трения fi,f2,...,fn материалов каждого из рабочих колец и инерционного элемента удовлетворяет соотношению ...fn. Введенные признаки не использованы в известных вибрационных датчиках и сообщают предлагаемому датчику возможность фиксации предельных значений монотонно воз- растающих значений виброускорения, воздействующего на инерционное тело, вследствие того, что его движение по повер- хности каждого из п рабочих колец возникает при превышении силами инерции сил трения, дискретно увеличивающихся от центрального рабочего кольца к наружному, а регистрация соответствующих уровней вибрации осуществляется при замыкании пар электропроводящих колец, разделяющих рабочие кольца.
Надежность работы датчика повышается за счет того, что при действии виброускорений, превышающих заданное предельное значение, инерционный элемент проходит
при своем движении определенный участок пути по рабочему кольцу до замыкания контактов, чем снижается влияние помех и кратковременных воздействий на фиксацию технического состояния исследуемого (контролируемого) объекта с заданным уровнем вибрации
Поясним связь между вибрационным воздействием и ответной реакцией инерционного элемента. Как следует из фиг.1, движение инерционного элемента начинается при преодолении силами инерции силы трения. Условие начала движения записывается в виде
ma-sin o ti-mfq 0,. (1)
где m - масса инерционного элемента;
а - ускорение вибрации;
(а круговая частота вибрационных колебаний;
f - коэффициент трения соприкасающихся поверхностей;
q - ускорение силы тяжести; ti - время начала движения.
Время начала движения ti, а также, соответственно, и окончания воздействия внешних сил до набора конечной скорости на полупериоде движения определяется по следующей формуле
ti larcsin§
(2)
Как следует из (2), только при а f q функция arc sin-З- имеет физический смысл. При
:3
инерционное тело совершает движение вместе с корпусом, и по рабочей поверхности колец не перемещается.
Определим предельное ускорение апр, при котором осуществляется граничный цикл движения с нулевыми скоростями в конце половины периода воздействий виброускорений.
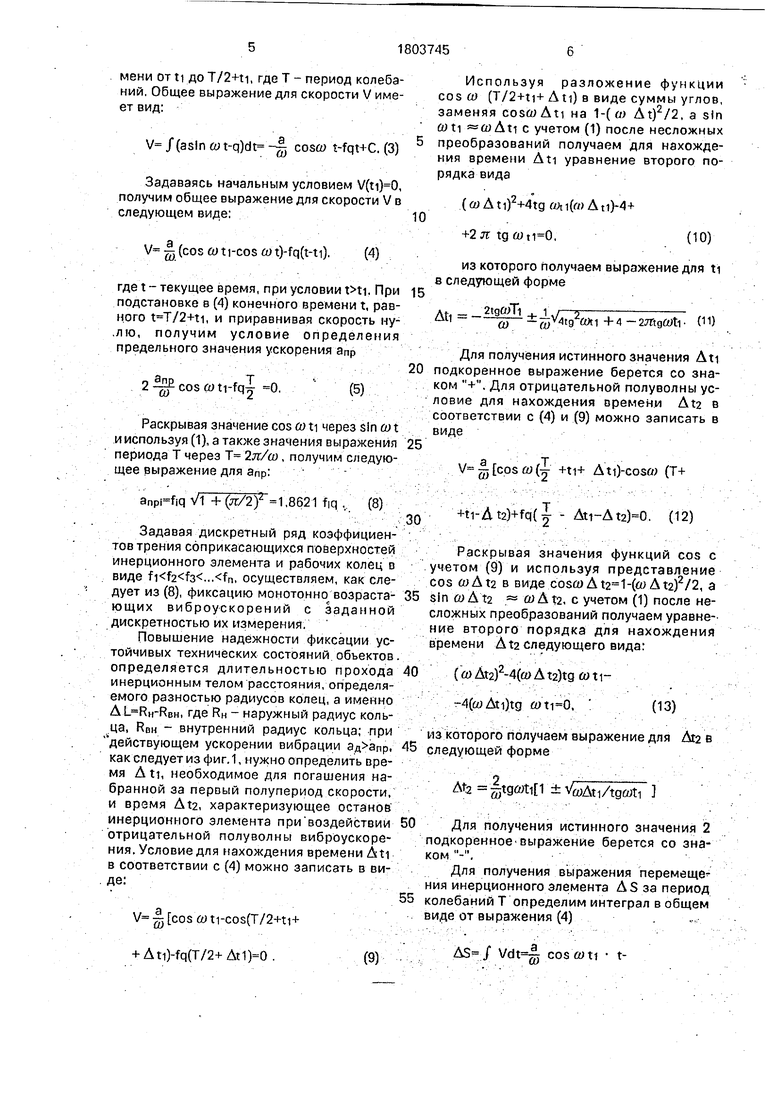
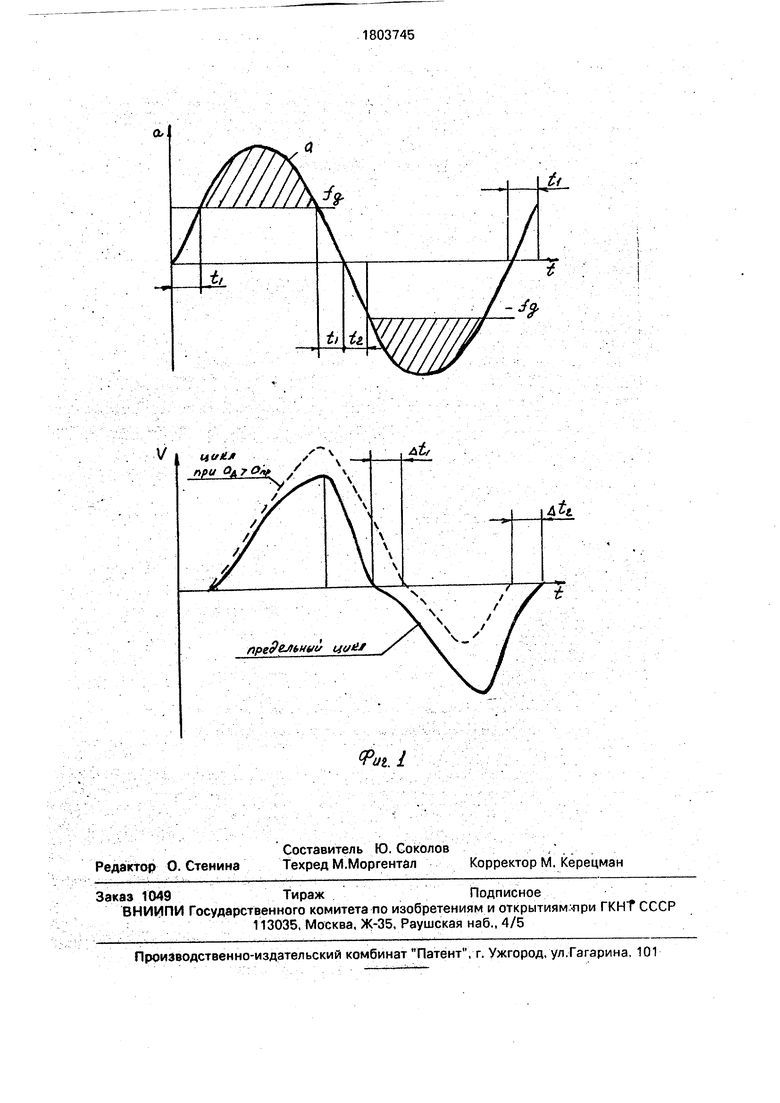
Скорость движения V определяется, как следует из фиг. 1, интегралом за период времени от ti до T/2+ti, где Т - период колебаний, Общее выражение для скорости V имеет вид:
(aslnwt-q) cosca t-fqt+C. (3)
Задаваясь начальным условием V(ti)0, получим общее выражение для скорости V в следующем виде:
V (cos w t i-cos ш t)-fq(t-ti).
где t - текущее время, при условии , При подстановке в (4) конечного времени t, равного t T/2+ti, и приравнивая скорость ну- ,лю, получим условие определения предельного значения ускорения аПр
2 cos wtrfqj 0.
(У
Раскрывая значение cos u)ti через sin ш t и используя (1), а также значения выражения 25 периода Т через Т 2л/а, получим следующее выражение для апр:
V1 + (л/2) 1,8621 fiq ,. (8)
Задавая дискретный ряд коэффициентов трения соприкасающихся поверхностей инерционного элемента и рабочих колец в виде ...fn, осуществляем, как следует из (8), фиксацию монотонно возрастающих виброускорений с заданной дискретностью их измерения.
Повышение надежности фиксации устойчивых технических состояний.объектов, определяется длительностью прохода инерционным телом расстояния/определяемого разностью радиусов колец, а именно A L RH-RBH, где RH - наружный радиус кольца, RBH - внутренний радиус кольца; при действующем ускорении вибрации , как следует из фиг, 1, нужно определить время Л ti, необходимое для погашения набранной за первый полупериод скорости, и время At2, характеризующее останов инерционного элемента при воздействии отрицательной полуволны виброускорения. Условие для нахождения времени A ti в соответствии с (4) можно записать в виде:
V cos о) ti-cos(T/2+ti+
(У
+ Ati)-fq(T/2+At1)0.
Используя разложение функции cos o (T/2+ti+ Ati) в виде суммы углов, заменяя coscuAti на 1-(w At)2/2, a sin wti «wAtt с учетом (1) после несложных преобразований получаем для нахождения времени Ati уравнение второго порядка вида
10
(twAti) +4tg ah(n Ati)-4+ +2тг tg ,
(Ю)
15
из которого получаем выражение для ti в следующей форме
At, П .j-lvy +4 27rtgftJtl. (ц)
20
25
Для получения истинного значения Ati подкоренное выражение берется со знаком +. Для отрицательной полуволны условие для нахождения времени At2 в соответствии с (4) и (9) можно записать в виде
V I; cos (о (тг +ti+ A ti)-cosw (Т+
30
+ti-A t2)+fq( - Ati-A t2)0. (12)
Раскрывая значения функций cos с учетом (9) и используя представление cos wAt2 в виде cosu)()2/2, a sin (о A t2 о) A t2, с учетом (1) после несложных преобразований получаем уравне-- ние второго порядка для нахождения времени At2 следующего вида:
40
(о) At2)2-4(o A t2)tg to г - -4(wAti)tg ,
(13)
из которого получаем выражение для 45 следующей форме
At2 В
At2 tgo;ti 1
: Vo)Ati/tgwti J
Для получения истинного значения 2 подкоренное Выражение берется со знаком .-. . .
Для получения выражения перемещения инерционного элемента AS за период колебаний Т определим интеграл в общем виде от выражения (4)
(9)
.AS-;/ Vdt cos wti tяг- «n-fq V +fPtit+D or :
(14)
При начальном условии Д при выражение для AS запишется в виде
AS JJcoSftrti(t - ti) + - {sinorti -
-slnwt)-fq(tit-- -y).(15)
За период времени от ц до T/2+ti+ Ati произойдет перемещение инерционного элемента в направлении действия инерционных сил на величину ASi, равную
ASi |cosa ti(J + An) +-%sln wti +
+ slnf«(ti + Ati)V-Ј--2
У
л(J+Ati)2
(16)
При воздействии ускорения обратного знака за период времени от T/2+ti+ Ati до T+ti- Ata произойдет перемещение инерционного элемента в направлении, противоположном первоначальному действию инерционных сил на величину ASa, равную
AS2 - JjCos ft) (ti+ Atij(T/2-Ati- ... . . .. :... , - .. ... ;
.e(ti+ Ati)+sln w(ti+At2)+fq
. - ОГ . . . .: . -V. : .
(T/2 - Ati - At2),
2J .....
(17)
Общее перемещение Д S за период колебаний Т соответственно равно сумме ASi и ДЗг:
AS cosorti - cosco(ti + Ati)| + + cos(0ti + coso)(ti +Ati)Ati 4- + §coso ti+Ati)At2+- {sincuti-slnft ti 4-At2) - 2Ati(T-bAt2)+TAt2-A g
Для частоты (о при заданном значении
AL необходимо иметь число m периодов.
колебаний при известной величине AS,
чтобы инерционное тело замкнуло контактную пару. Число m соответственно равно
AL
(19)
Таким образом, при известных частотах колебания объекта разность наружных и внутренних диаметров рабочих колец можно выбирать из условия существования числа колебаний т, свидетельствующих о
достижении устойчивого предельного технического состояния контролируемым объ- ектом или его агрегатом.
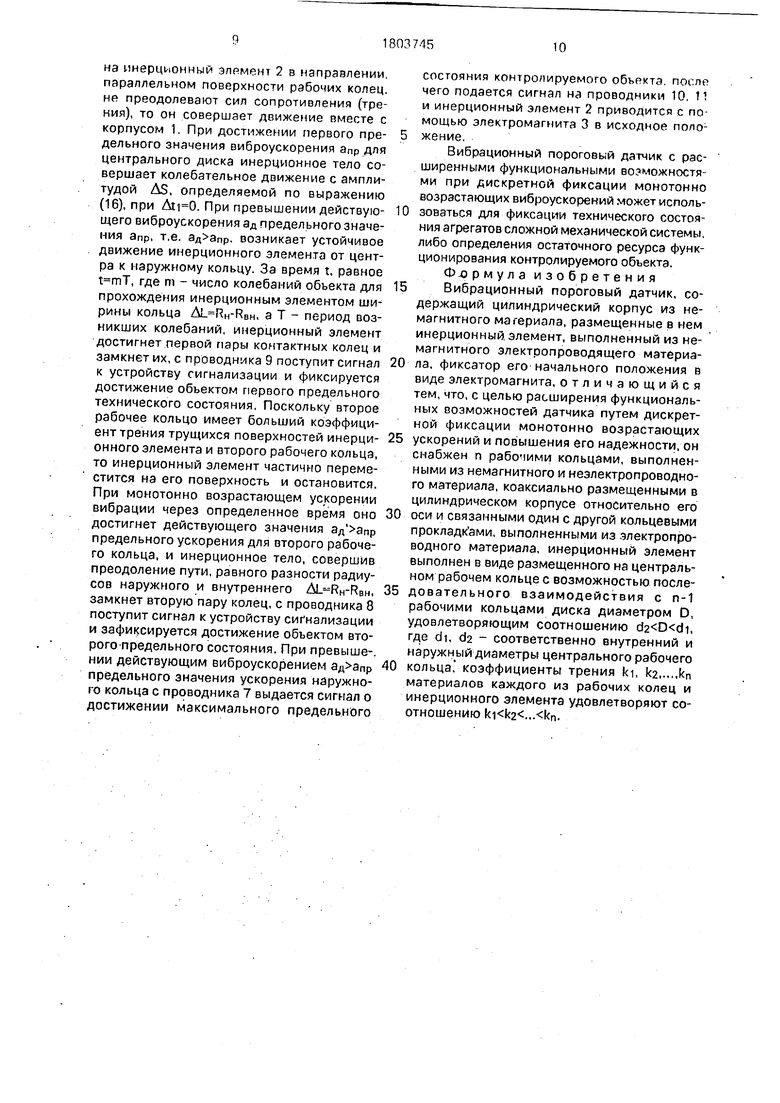
На фиг.1 приведены временные функции виброускорения и скорости движения
инерционного элемента; на фиг.2 - общий вид датчика с поперечным разрезом.
Вибрационный пороговый датчик содержит цилиндрический корпус 1 из немагнитного материала, размещенные .в нем
инерционный элемент 2, выполненный из
немагнитного материала, размещенные в
нем инерционный элемент 2, выполненный
из магнитного электропроводящего материала, фиксатор его начального положения в
виде электромагнита 3, расположенного по оси 00 под инерционным элементом, и контактные пары 4. Датчик снабжен набором жестко связанных между собой соосных рабочих колец 5 возрастающего диаметра от
центра к периферии, выполненных из немагнитного и неэлектропроводного материала, разделенных между собой контактными парами 4 в виде электропроводящих колец. Из пар контактных колец одно кольцо имеет
единый контакт 6, остальные - контакты 7, 8, 9 подключены к устройствам сигнализации, предназначенным для фиксации сигнала тревоги или формирования управляющего импульса для остановки контролируемого
объекта. Провода 10 и 11 служат для подачи управляющего сигнала в электромагнит 3. Сверху корпус закрыт стеклом 12, снизу - крышкой 13.
Датчик работает следующим образом.
На контролируемом объекте (на чертеже не показан) закрепляется вибрационный пороговый датчик. Подачей управляющего сигнала по проводам 10 и 11 включается электромагнит 3 и притягивает инерционный элемент к центру центрального рабочего диска 5, т.е. выставляет его в исходное начальное положение. При работе контроли- руемого объекта, если возмущающие гармонические периодические силы, действующие
на инерционный элемент 2 в направлении, параллельном поверхности рабочих колец, не преодолевают сил сопротивления (трения), то он совершает движение вместе с корпусом 1. При достижении первого предельного значения виброускорения апр для центрального диска инерционное тело совершает колебательное движение с амплитудой Д5, определяемой по выражению (16), при . При превышении действующего виброускорения ад предельного значения апр, т.е. . возникает устойчивое движение инерционного элемента от центра к наружному кольцу. За время t, равное , где m - число колебаний обьекта для прохождения инерционным элементом ши-1 рины кольца AL RH-RBH, а Т - период возникших колебаний, инерционный элемент достигнет первой пары контактных колец и замкнет их, с проводника 9 поступит сигнал к устройству сигнализации и фиксируется достижение объектом первого предельного технического состояния. Поскольку второе рабочее кольцо имеет больший коэффициент трения трущихся поверхностей инерционного элемента и второго рабочего кольца, то инерционный элемент частично переместится на его поверхность и остановится. При монотонно возрастающем ускорении вибрации через определенное время оно достигнет действующего значения предельного ускорения для второго рабочего кольца, и инерционное тело, совершив преодоление пути, равного разности радиусов наружного и внутреннего Д1 Р н-Рвн, замкнет вторую пару колец, с проводника 8 поступит сигнал к устройству сигнализации и зафиксируется достижение объектом второго предельного состояния. При превыше-. нии действующим виброускорением предельного значения ускорения наружного кольца с проводника 7 выдается сигнал о достижении максимального предельного
состояния контролируемого объекта, после чего подается сигнал на проводники 10. П и инерционный элемент 2 приводится с помощью электромагнита 3 в исходное поло- жение.
Вибрационный пороговый датчик с расширенными функциональными возможностями при дискретной фиксации монотонно возрастающих виброускорений может использоваться для фиксации технического состояния агрегатов сложной механической системы, либо определения остаточного ресурса функционирования контролируемого объекта. Формула изобретения
Вибрационный пороговый датчик, содержащий цилиндрический корпус из немагнитного материала, размещенные в нем инерционный, элемент, выполненный из немагнитного электропроводящего материала, фиксатор его начального положения в виде электромагнита, отличающийся тем, что, с целью расширения функциональных возможностей датчика путем дискретной фиксации монотонно возрастающих
ускорений и повышения его надежности, он снабжен п рабочими кольцами, выполненными из немагнитного и неэлектропроводного материала, коаксиально размещенными в цилиндрическом корпусе относительно его
оси и связанными один с другой кольцевыми прокладк ами, выполненными из электропроводного материала, инерционный элемент выполнен в виде размещенного на центральном рабочем кольце с возможностью последовательного взаимодействия с п-1 рабочими кольцами диска диаметром D, удовлетворяющим соотношению , где di, da - соответственно внутренний и наружный диаметры центрального рабочего
кольца, коэффициенты трения ki, k2,...,kn материалов каждого из рабочих колец и инерционного элемента удовлетворяют соотношению ...kn.
V
«а-лг
при О&7ОяЈ /
Ј-- --NyA x v
At/
Put. 1
| Вибрационный пороговый датчик | 1983 |
|
SU1245892A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Б.И | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
