Изобретение относится к приборостроению и может быть использовано при определении вредного момента подвеса чувствительного элемента маятникового наземного гирокомпаса.
Цель изобретения - повышение быстродействия определения поправки к положению динамического равновесия прецессионных колебаний гирокомпаса, вызванную действием момента подвеса маятникового чувствительного элемента (ЧЭ).
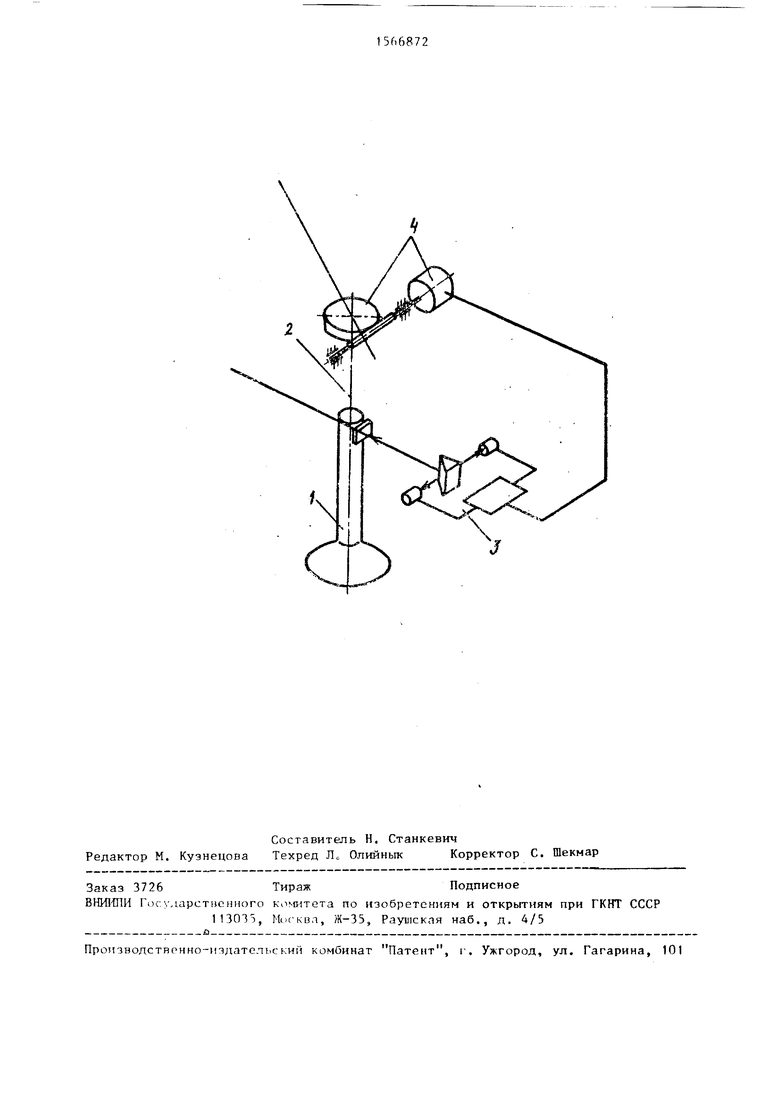
На чертеже схематично показано устройство, реализующее способ определения поправки к положению динамического равновесия прецессионных колебаний гирокомпаса, вызванной деЛ- CTBIем вредного момента подвеса. Устройство содержит чувствительный элемент 1, подвешенный на тор- сионе 2, азимутальную следящую систему подвеса 3 и исполнительный механизм раскрутки верхней точки подвеса 4 движущегося чувствительного элемента 1. В силу того, что при слежении та свободным движением ЧЭ 1 азимутальная следящая система подвеса 3 обеспечивает постоянство угла $ между нульпунктом (местом нули подвеса) подвеса и оптической осью датчика азимутальной системы 3, чувствительный элемент 1 под действием постоянного вредного момента подвеса:
От
05
о оо j ю
М6р С.
Mgp средний момент подвеса;
С - азимутальная жесткость под- . веса;
О - угол закрутки подвеса (угол несовпадения нульпункта подвеса с оптической осью датчика азимутальной следящей системы) т двигаться с ускорением
q
Мер
е
где 0 - момент инерции ЧЭ относительно вертикальной оси. Интегрируя параметры движения ЧЭ, например пройденный путь за известны промежуток времени t ускорение движения ЧЭ может быть определено в соответствии с известной Лормулой:
to t2 4)ot + -Jгде Дер - пройденный угол;
- начальная скорость движения t - время.
При ($0 близкой к нулю (обеспечивается демпфированием колебаний перед измерениями
Aq
откуда
а момент подвеса, соответственно
2&q Г
«„.-О t,
Зная величину момента подвеса, нетрудно вычислить поправку к положению динамического равновесия прецессионных колебаний ЧЭ Д R, вызванную действием вредного момента подвеса по известной формуле
10
AR
мер
HUcos tp
0
5
0
5
0
тсе„ провести корректировку вычисленного положения равновесия.
Быстродействие данного способа гораздо выше (10 с) способа, взятого за прототип (3 х 17,25 мин), при сохранении точности корректировки положения динамического равновесия прецессионных колебаний ЧЭ.
Формула изобретения Способ определения поправки к положению динамического равновесия прецессионных колебаний наземного гирокомпаса с азимутальной следящей системой, вызванной действием вредного момента подвеса маятникового чувстОи- тельного элемента путем отслежив Ьп 1 следящей системой свободного движения чувствительного элемента и измерения параметр в движения с последующим вычиспением поправки, отличающийся тем, что, с целью повышения быстродействия определения поправки, перед измерениями демпфируют свободные колебания чувствительного элемента, измеряют время одностороннего движения чувствительного элемента и соответствующий ему угол и по полученным данным рассчитывают ускорение чувствительного элемента и вредный момент подвеса.
3
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения направления меридиана гирокомпасом | 1978 |
|
SU1602141A1 |
| Гирокомпас | 1982 |
|
SU1559842A1 |
| Трехстепенный маятниковый гирокомпас | 1991 |
|
SU1809306A1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| Гирокомпас | 1981 |
|
SU1559844A1 |
| Наземный гирокомпас | 1976 |
|
SU550862A1 |
| Угломерное устройство для наземного гирокомпаса | 1976 |
|
SU579544A2 |
| Способ измерения азимута наземным гирокомпасом | 1979 |
|
SU1622760A1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| "Устройство автоматического определения положения равновесия прецессионных колебаний чувствительного элемента наземного гирокомпаса | 1978 |
|
SU709951A1 |
Изобретение относится к приборостроению и может быть использовано при определении вредного момента подвеса чувствительного элемента маятникового наземного гирокомпаса. Цель изобретения - повышение быстродействия определения поправки к положению динамического равновесия прецессионных колебаний гирокомпаса. Для определения попрлвьн отслеживают свободное движение чувствительного элемента, демпЛнруо - его колебания перед измерениями, а по время одностороннего движения чувствительного элемента измеряют время этого движения и соответствующий ему угол. По полученным данным g рассчитывают ускорение движения и вредный момент. 1 ил. (Л
| Руководство по геодезическим работам | |||
| Вып | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Редакционно-итдательский отдел БТС, 1964, прилож | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
