серводвигателя электрически связан с входом электронного регулятора перемещения серводвигателя, а выход последнего - с управляющим входом электрогидравлического усилителя мощности. Для повышения производительности е системе управления имеется следящий привод перемещения подвижной траверсы, выполненный в виде
датчика перемещения 7 траверсы и электронных регуляторов перемещения траверсы 8, каждый из которых первым входом электрически связан с датчиком перемещения траверсы, вторым входом - с задатчиком перемещения, а выход - с входом электронного регулятора перемещения серводвигателя соответственно. 2 з.п, ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления клапанным распределителем гидравлического пресса | 1984 |
|
SU1189689A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД | 2003 |
|
RU2256106C1 |
| СИСТЕМА УПРАВЛЕНИЯ СЛЕДЯЩИМ ПРИВОДОМ ВИБРАЦИОННОГО ПРЕССА | 1995 |
|
RU2095249C1 |
| СЛЕДЯЩИЙ КЛАПАННЫЙ ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2188343C2 |
| Электрогидравлическая следящая система | 1985 |
|
SU1317189A1 |
| Устройство для автоматического регулирования давления в гидравлическом прессе | 1983 |
|
SU1133119A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821204A1 |
| Следящая система управления валом главного клапанного распределителя гидравлического ковочного пресса | 1986 |
|
SU1388326A1 |
| Цифровой автоматический регулятор усилия гидравлического пресса | 1990 |
|
SU1773484A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКОГО ПРИВОДА РЕГУЛИРУЮЩЕГО ОРГАНА | 2008 |
|
RU2366820C1 |
Изобретение относится к кузнечно- прессовому производству, а именно к системам управления ходами подвижной траверсы гидравлического ковочного пресса с приводом от клапанного распределителя. Сущность: система управления гидравлическим прессом содержит клапанный распределитель 1, серводвигатели 3, каждый из которых связан с одним из клапанов 2 распределителя, позиционные следящие приводы каждого серводвигателя, выполненные в виде датчика перемещения 4 серводвигателя, электронного регулятора перемещения 5 серводвигателя и электрогидравлического усилителя мощности 6, гидравлически связанного с полостями серводвигателя, и задатчик перемещения 10. Выход датчика перемещения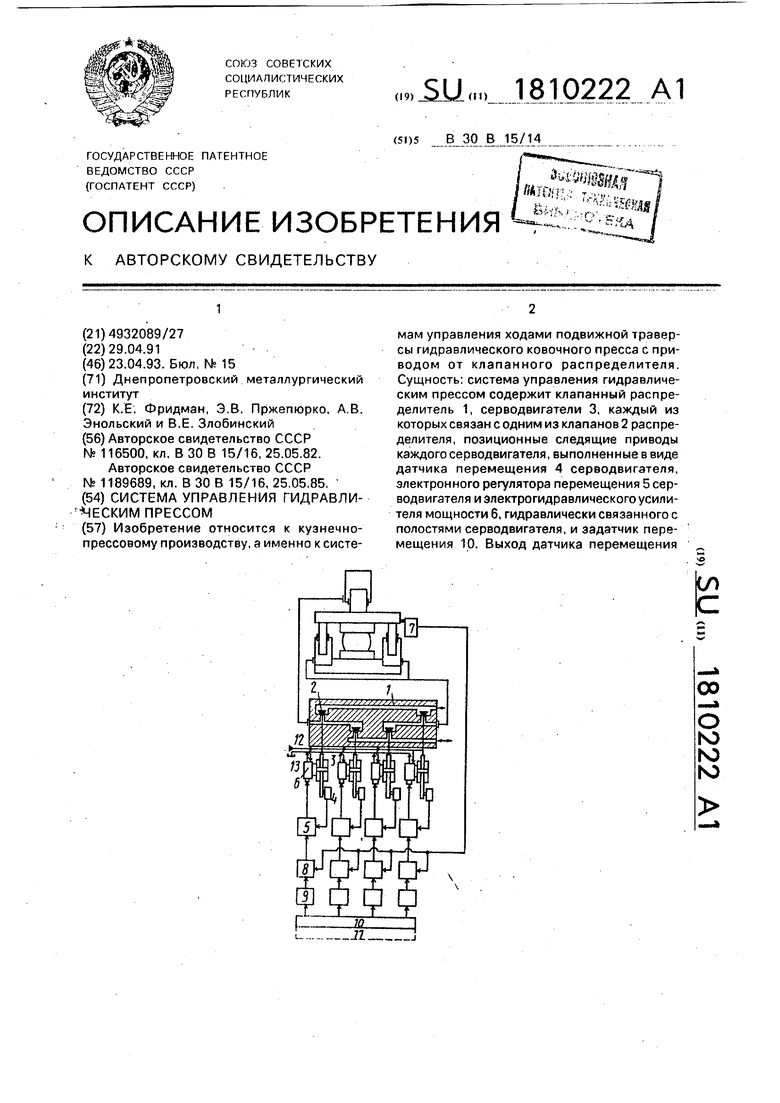
Изобретение относится к кузнечно-прес- совому производству, а именно к системам управления ходами подвижной траверсы гидравлического ковочного пресса с приводом от клапанного распределителя.
Цель изобретения - устранение указанных недостатков и повышение производительности и точности работы пресса,
Сопоставительный анализ с прототипом позволяет сделать вывод, что заявляв- мая система управления отличается наличием следящего привода перемещения подвижной траверсы, выполненного в виде датчика перемещения траверсы, электронных регуляторов перемещения траверсы и блоков ограничения перемещения траверсы с регулируемыми динамическими характеристиками и регулируемым ограничением параметров.
На чертеже представлена функциональ- ная схема системы управления ковочным прессом.
Система управления гидравлическим прессом содержит корпус распределителя 1 с клапанами 2 и серводвигателями 3. Каж- дый серводвигатель снабжен датчиком перемещения 4, электронным регулятором 5 перемещения серводвигателя и электрогидравлическим усилителем мощности 6. Дат- чик перемещения траверсы 7 соединен с „ электронными регуляторами перемещения траверсы 8, которые связаны через блоки ограничения 9 с задатчиком перемещения 10 или генератором колебаний 11, а с другой стороны - с электронными регуляторами пе- ремещения серводвигателей 5.
Ввиду того, что такие части системы управления, как электрогидравлический усилитель мощности, клапанный распределитель и, собственно, пресс - являются, с точки зрения теории автоматического регулирования, сложными объектами с существенными не- линейностями, электронные регуляторы перемещения серводвигателей и траверсы 5 и 8 представляют собой в общем случае про- х порционально-интегрально-дифференциа- лмше оегуляторы с возможностью раздельной регулировки каждой динамической составляющей и регулируемым ограничением выходных величин; Такое построение регуляторов решается схематическими методами, причем регулировка может осуществляться как при наладке системы управления перед пуском в эксплуатацию с целью получения приемлемых переходных процессов в каждом контуре, так и в процессе эксплуатации с помощью управляющей вычислительной машины, что позволяет сделать систему управления адаптивной.
Блок ограничения перемещения 9 траверсы представляет собой усилитель-ограничитель с возможностью регулировки установок ограничения, как вручную, так и автоматически, например, по команде УВМ,
Задатчик перемещения 10 предназначен для выдачи электрического сигнала, задающего положение траверсы, как по команде оператора, так и по команде УВМ.
Управляемый генератор 11 представляет собой электронное устройство, предназначенное для генерирования колебаний с изменяемыми параметрами сигналов, например, амплитудой сигнала, его формой, периодом, скважностью. Управляется тене- ратор либо с пульта оператора, либо по команде УВМ.
Датчики перемещения серводвигателя и траверсы 4 и 7 постоянно выдают в систему информацию о положении в пространст- ветраверсы пресса и штока серводвигателя. Электрогидравлический усилитель 6 подключен к магистралям давления 12 и слива 13, а нагрузочными каналами - к полостям серводвигателя 3, приводящего клапаны 2.
Работа устройства рассматривается на примере привода одного из клапанов 2, так как все приводы клапанов идентичны.
Сигнал с задатчика перемещения 10 или генератора 11, пройдя блок ограничения перемещения траверсы 9, поступает на вход электронного регулятора перемещения 8 траверсы, сравнивается с сигналом датчика перемещения 7 траверсы. Разность этих сигналов, представляющая собой рассогласование по перемещению траверсы усиливается. Выходной сигнал электронного регулятора перемещения траверсы 8 является предписанным значением для электронного регулятора перемещения серводвигателя 5, на вход которого он подается, причем уставками ограничения этого сигнала определяется максимальная скорость хода траверсы пресса. Сигнал задания скорости в электронном регуляторе перемещения серводвигателя 5 сравнивается с сигналом дат- чика перемещения 4 серводвигателя. Полученное рассогласование по скорости траверсы усиливается и управляет электрогидравлическим усилителем 6 мощности, причем рассогласование ограничено устав- кой регулятора перемещения серводвигателя 5. Элёктрогидравлический усилитель пропускает заданный расход масла в полости серводвигателя 3, который управляет клапаном 2. Когда сигнал с датчика 4 станет равным сигналу задания скорости, поступающего с выхода электронного регулятора перемещения траверсы 8, рассогласование по скорости траверсы станет равным нулю и серводвигатель остановится, При этом клапаны распределителя находятся в заданном положении и траверса пресса движется с заданной скоростью,
В процессе подхода траверсы к заданному положению, сигнал с задатчика перемещения 7 траверсы достигает значения задания перемещения на входе электронного регулятора 8, Рассогласование по перемещению уменьшается и вызывает уменьшение задания, предписанного электронному регулятору 5 перемещения серводвигателя. Контур скорости траверсы, стремясь свести к нулю рассогласование по скорости отрабатывает это задание, и серводвигатель 3 прикрывает клапан 2 распределителя 1, При равенстве сигналов задания положения траверсы и ее фактического положения, траверса останавливается,
Таким образом, электронные регуляторы перемещения серводвигателя 5 и траверсы 8, работают так, чтобы свести к нулю рассогласование между предписанными значениями и действительными. Причем настройкой электронных регуляторов определяется вид переходных процессов системы и ограничения скорости и ускорения травер-, сы, а регулируемыми уставками блока огра- ничения перемещения 9 траверсы обеспечивается ограничение пределов перемещения траверсы пресса.
При ручном режиме работы оператор, воздействуя на задэтчик перемещения 10, задает движение траверсы пресса, причем пережима поковки не происходит, благодаря наличию блока ограничения перемещения 8 траверсы, скорость которой во время холостого хода является максимально воз- 5 можной.
В полуавтоматическом режиме оператор имеет возможность задавать перемещение траверсе пресса как вручную, так и от управляемого генератора 11, что особенно 0 эффективно при отделочных операциях.
В автоматическом режиме регулирование перемещений траверсы пресса и увязка их с движениями ковочного манипулятора, т.е. образование автоматического ковочно- 5 го комплекса, осуществляется управляющей вычислительной машиной.
Внедрение системы управления ковочным прессом обеспечит повышение производительности и увеличение точности 0 работы пресса, позволит создавать высокопроизводительные ковочные комплексы с .автоматизацией на базе современной электронно-вычислительной техники, а также повысить надежность гидрооборудования 5 пресса, благодаря устранению гидроударов, частично снять долю психологической и физической нагрузки с оператора пресса: существенно уменьшить зависимость производительности и точности работы пресса, 0 от профессиональных качеств оператора.
В современных гидравлических ковочных прессах заявляемая система управления позволит повысить производительность на 5-10%. 5Формула изобретения
перемещения, а выходом - с входом электронного регулятора перемещения серводвигателя соответственно, при этом электронные регуляторы перемещения серводвигателей и траверсы выполнены с регулируемыми динамическими характеристиками и регулируемым ограничением,
са с регулируемыми уставками ограничения, причем вход каждого блока соединен с выходом задатчика перемещения, а выход - с вторым входом электронного регулятора перемещения траверсы соответственно.
| Шахтный взрывобезопасный экранированный кабель | 1956 |
|
SU116500A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Устройство управления клапанным распределителем гидравлического пресса | 1984 |
|
SU1189689A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
