Изобретение относится к машиностроению, а именно к кулисным механизмам, и может быть использовано в роботах и манипуляторах, а также в распределительных устройствах, технических узлах автоматических линий..
Целью изобретения является расширение кинематических возможностей механизма путем сообщения возвратно- поступательного и вращательного движения стержню, который одновременно является рабочим органом.
Указанная цель достигается тем, что стержень и ползун ведомого звена шарнирно закреплены к гибкому элементу в заранее заданных точках.
На чертеже представлен предлагаемый кулисный механизм.
Кулисный механизм содержит ведущий 1 и направляющие 2 шкивы, охватывающий их гибкий элемент 3, ведомое звено, выполненное в виде стержня 4 и ползуна 5, которые шарнирно с о е д и н е н ы с г и б к и м элементом в соответствующих точках А и Б,
Механизм работает следующим образом.
Ведущий шкив 1 вращаясь приводит в движение гибкий элемент 3, который в свою очередь передает движение ведомому зве0
5
ну шарнирно связанную с ним при помощи стержня 4 и ползуна 5 в соответствующих точках Л и Б с наперед заданными координатами, выбирающими из технологического условия. При этом длина гибкого элемента между шарнирами в точках А и Б выбирается из условия:
,5L,
где L - длина гибкого элемента;
... IAB.- длина гибкого элемента между шарнирами А и Б.
Формула изобретения Кулисный механизм, содержащий ведущий и направляющий ролики, охватывающий их гибкий элемент, кулису, шарнирно связанный с гибким элементом ползун, а ролики размещены так, что участки гибкого элемента/охватывающие не менее четырех последовательно расположенных роликов, 0 имеют зигзагообразную форму, о т л и ч а .iota и и с я тем, что, с целью расширения кинематических возможностей, стержень кулисы шарнирно закреплен на гибком элементе, а расстояние между шарнирами крепления ползуна и стержня выбрано из условия I 1/21,
где I - длина гибкого элемента между шарнирами,
L - длина гибкого элемента. 0 .
5
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-КУЛИСНЫЙ МЕХАНИЗМ | 1991 |
|
RU2031282C1 |
| Кулисный механизм | 1986 |
|
SU1370348A1 |
| Кулисный механизм | 1980 |
|
SU905549A1 |
| Кулисный механизм | 1986 |
|
SU1402742A1 |
| Кулисный механизм | 1990 |
|
SU1772484A1 |
| Кулисный механизм | 1986 |
|
SU1379529A1 |
| Кулисный механизм | 1991 |
|
SU1825921A1 |
| Кулисный механизм с гибким звеном | 1989 |
|
SU1703893A1 |
| Кулисный механизм | 1987 |
|
SU1504430A1 |
| Кулисно-реверсивный механизм | 1985 |
|
SU1270462A1 |
Изобретение относится к кулисным механизмам и может быть использовано в роботах и манипуляторах, а также в распределительных устройствах, технических автоматических линий. Цель изобретения - расширение кинематических возможностей путем сообщения ведомому звену возвратно-поступательного и вращательного движения. Для этого стержень 4 ведомого звена шарнирно связан с гибким элементом 3, а длина гибкого элемента 3 между шарнирами А и Б выбраны из условия IAB ,5 1,где L - длина гибкого элемента, АБ длина гибкого элемента между шарнирами А и Б. 1 ил.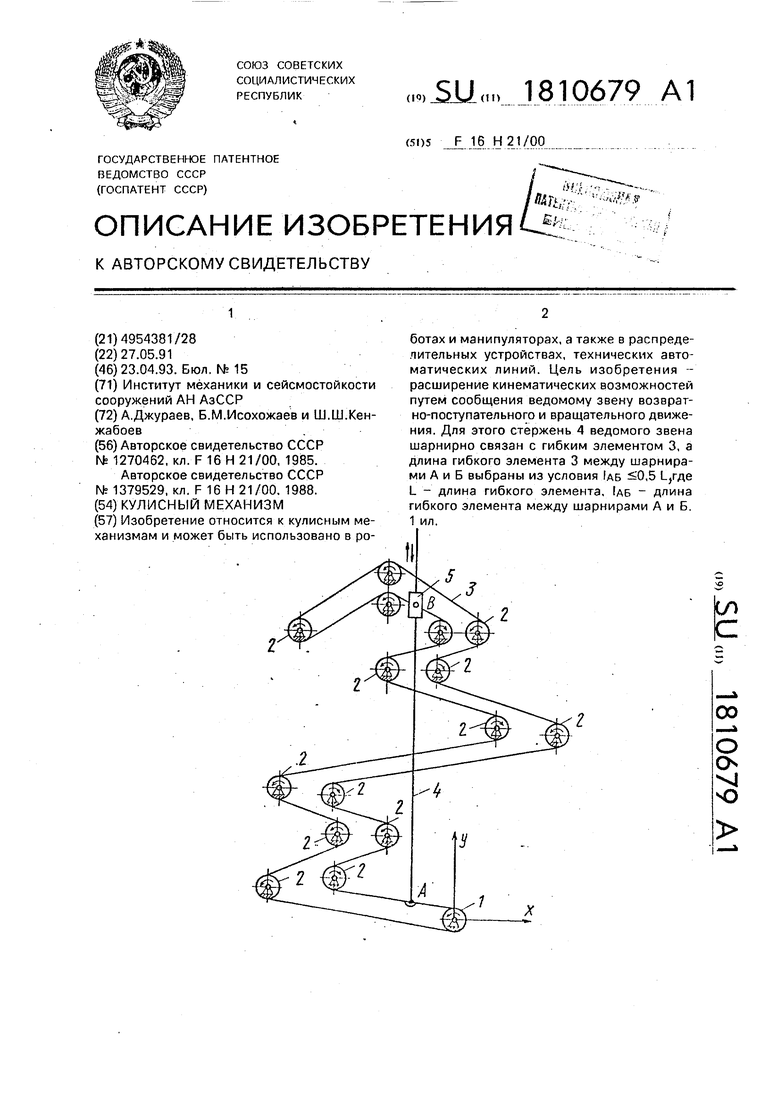
| Кулисно-реверсивный механизм | 1985 |
|
SU1270462A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Кулисный механизм | 1986 |
|
SU1379529A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
