Изобретение относитея к машиностроению и может быть использовано в качестве ;)лемента конструкции роботов и манипуляторов.
Цель изобретения - расширение кинематических возможностей механизма иутем обеспечения врашательно-реверсивного движения кулисы с любым наперед заданным углом поворота.
На чертеже представлен кулисно-реверсивный механизм, обший вид.
Кулисно-реверсивный .механизм содержит ведуш,ий 1 и наиравляюш,ие 2 ролики, охватывающий их гибкий элемент 3, кулису 4, ось 5 качания которой обращена к наружной поверхности гибкого элемента 3, и ползун 6, шарнирно связанный с гибким эле.ментом 3. Направляющие ролики 2 разделены на две части, гибкий элемент 3 одной ветвью размещен между ними, а оси вращения каждой части направляющих роликов 2 расположены на спирали, огибающей ось 5 качания, например, спирали Архимеда. При этом ось 5 качания может находиться в начале архимедовой спирали.
Кулисно-реверсивный механизм работает следующим образом.
Ведущий ролик 1, вращаясь, приводит в движение гибкий элемент 3, который в свою очередь перемещает кулису 4 посредством шарнирно связанного с ним ползуна 6.
Кулиса 4 соверщает при этом вращательное движение, число оборотов которого зависит от числа витков спирали, а угол поворота может значительно превышать величину 360°. Когда ползун 6 оказывается в той точке контура, описываемого гибким элементом 3, которая соответствует началу или концу архимедовой спирали, происходит изменение направления вращения кулисы 4. После этого происходит ее вращение в обратном направлении, а затем цикл повторяется.
Формула изобретения
Кулисно-реверсивный механизм, содержащий ведущий и направляющие ролики, охватывающий их гибкий элемент, кулису, ось качания которой обращена к наружной поверхности гибкого элемента, и ползун, шарнирно связанный с гибким элементом, отличаюш,ийся тем, что, с целью расширения кинематических возможностей путем обеспечения вращательно-реверсивного движения кулисы с любым наперед заданным углом поворота, направляющие ролики разделены на две части, гибкий элемент одной ветвью размещен между ними, а осп вращения каждой части направляющих роликов расположены на спирали, огибающей ось качания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулисный механизм | 1991 |
|
SU1810679A1 |
| Кулисный механизм | 1986 |
|
SU1379529A1 |
| Кулисный механизм | 1986 |
|
SU1370348A1 |
| КРИВОШИПНО-КУЛИСНЫЙ МЕХАНИЗМ | 1991 |
|
RU2031282C1 |
| Устройство для изготовления двухспиральных пружин | 1980 |
|
SU937090A1 |
| ПРИВОД ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 1999 |
|
RU2160852C1 |
| Питатель | 1983 |
|
SU1133201A1 |
| Кулисный механизм | 1987 |
|
SU1504429A1 |
| Вибрационная машина | 1975 |
|
SU591307A1 |
| Механизм привода промышленного робота | 1989 |
|
SU1660959A1 |
Изобретение относится к машиностроению и может быть использовано в качестве элемента конструкции роботов и манипуляторов. Цель изобретения - расширение кинематических возможностей механизма путем обеспечения враш,ательно-реверсивного движения кулисы с любым наперед заданным углом поворота. Кулиспо-реверсивный механизм содержит кулису 4, ползун 6 которой шарнирно связан с гибким элементом 3. Направляюш,ие ролики 2, охватываемые гибким элементом 3, разделены на две части, гибкий элемент размеш.ен одной ветвью между ними, а оси вращения каждой части направляющих роликов расS положены на спирали, огибаюшей ось качания 5. Движение гибкого элемента 3 пре(Л образуется во вращательное реверсивное движение кулисы 4, число оборотов которой в одном направлении зависит от числа витков спирали. 1 ил. ьо о N4 Oi ГС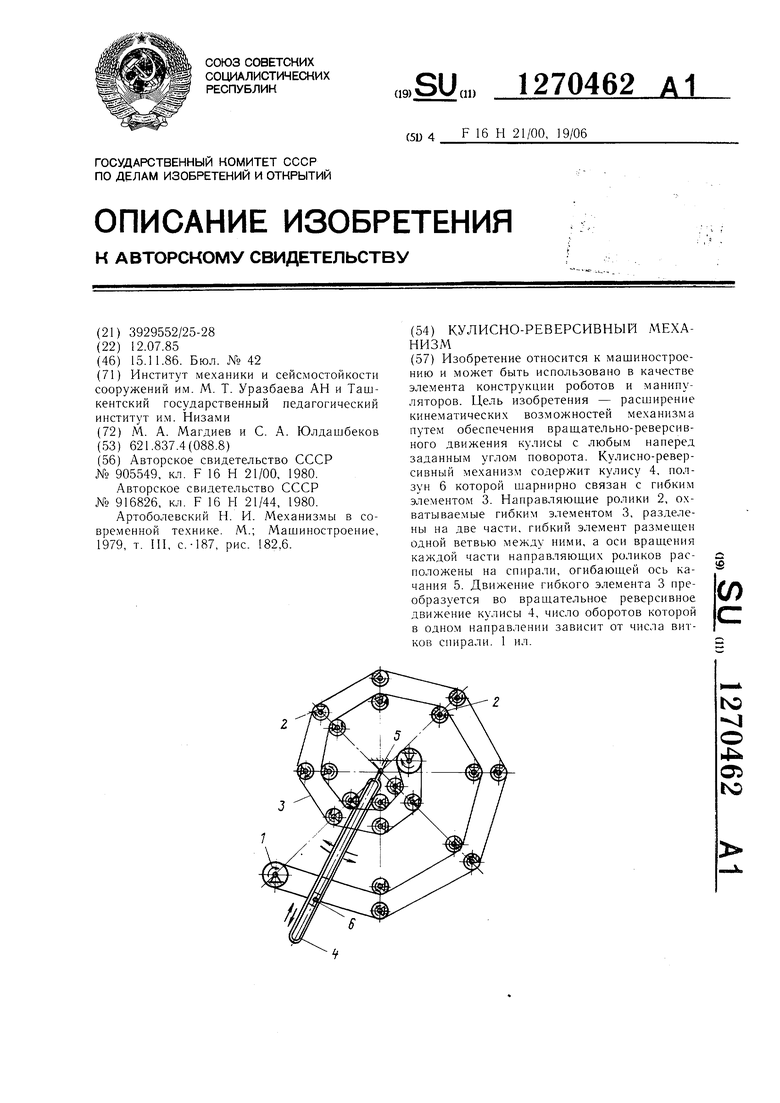
| Кулисный механизм | 1980 |
|
SU905549A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Кулисный механизм с гибким звеном | 1980 |
|
SU916826A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Артоболевский Н | |||
| И | |||
| Механиз.мы в современной те.хнике | |||
| М.; Машиностроение, 1979, т | |||
| HI, с.-187, рис | |||
| Затвор для дверей холодильных камер | 1920 |
|
SU182A1 |
