Предлагаемое техническое решение относится к электротехнике и может быть использовано для автоматического контроля высоты выводов основания электромагнитных реле и идентичных аппаратов массового производства.
Целью изобретения является повышение производительности труда, за счет одновременного измерения всех выводов основания реле.
На фиг.1 изображен автомат, общий вид; на фиг,2 - питающий лоток; на фиг.З - на базовой плите установлены механизм загрузки, механизм прижима и питающий лоток; на фиг.4 - измерительный блок (условно
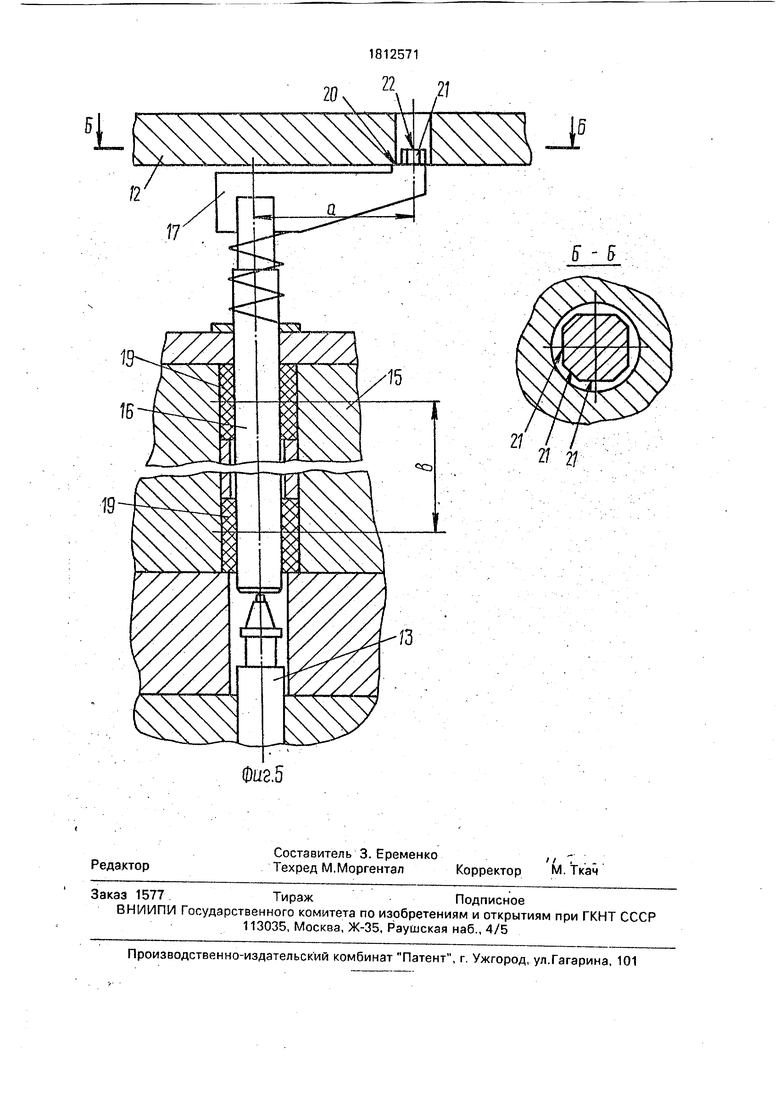
показан только один толкатель); на фиг.5 - толкатель.
Автомат контроля высоты выводов основания реле состоит из стола 1 (см. фиг.1), на котором размещены блок управления 2 с микроконтроллером 3, вибропривод 4 с чашей-ориентатором 5, на выходе которой горизонтально размещен питающий лоток б оснований реле (см. фиг.2). Кроме того, автомат состоит из механизма загрузки 7, из- мерительного блока 8, над которым расположен механизм прижима 9 с качающейся планкой 10 (см. фиг.З), Измерительный блок 8 содержит опорную 11 плиту, базовую 12 плиту со сквозными отверстияю ел
N
А
ми и преобразователи 13 (см. фиг.4). Количество преобразователей 13 соответствует количеству выводов основания реле.
На опорной плите 11 установлены две направляющие колонки 14, на которых закреплен клеммник 15 с.вбзможнрстью установочного перемещения по ним. На клемм- нике 15 смонтированы двухпредел ьные преобразователи 13, например типа ПП,
К каждому преобразователю 13 установлен подпружиненный толкатель, выполненный в виде подпружиненного стержня 16 и плеча 17 с выступом 18 на указанном плече 17. На концах стержня 16 расположены направляющие 19, запрессованные в клеммнике 15,
Кроме того, выступ плеча 17 (см. фиг.5) имеет три рабочие поверхности: опорную поверхность 20, соприкасающуюся с базовой плитой 12, призматическую21, фиксирующую толкатель относительно плиты 12, контактную 22, на которую воздействует вывод основания реле.
Каждое отверстие в базовой плите 12 (см. фиг.З) предназначено для одного из выступов 18 плеч 17 подпружиненных толкателей. Каждый из подпружиненных толкателей установлен, таким образо м, что взаимодействует с одним из упомянутых преобразователей 13, а выступом 18 своего плеча 17 взаимодействует с одним из выводов основания реле.
На базовой плите 12 установлены питающий лоток 6 с упором, механизм прижима 9 с качающейся планкой 10 и механизм загрузки 7, состоящий из пневмоцилиндра 23 и подвижной каретки 24, при этом подвижная каретка перемещается перпендикулярно движению основания реле по питающему лотку 6 и устанавливает основание реле в качающуюся планку 10 над сквозными отверстиями в базовой плите 12.
Качающаяся планка 10 (см. фиг.З), выполненная с профильной дорожкой под оснований реле, установлена с возможностью поворота вокруг своей горизонтальной оси и фиксируется по верхнему положению упором.
На одном рабочем столе установлено два автомата, управляемые общим блоком управления (на фигуре не показано) с микроконтроллером 3 с пневмосистемой.
Основание реле (см. фиг.2) имеет базовую поверхность А, относительно которой необходимо замерить высоту h в пределах поля допуска размера h.
Предполагаемый автомат работает следующим образом,
. Основания реле загружаются в чашу- ориентатор 5 в навал. Под действием вибропривода 4 сориентированное основание реле из чаши-ориентатора 5 по питающему лотку 6 подается на исходную позицию механизма загрузки 7 до упора в датчик наличия основания реле (на фиг.1 не показано). Под действием сигнала датчика микроконтроллер 3 выдает сигнал на включение пневмораспределителя, управляющего работой пневмоцилиндра 23 механизма загрузки 7. При срабатывании пневмоцилиид- ра 23 (см. фиг.З) перемещается подвижная каретка 24, которая переносит основания реле в горизонтальной плоскости в качающуюся планку 10 механизма прижима 9 и
5 одновременно отсекает поступление из лотка . 6 последующего основания реле,
В конечном положении подвижной каретки 24 срабатывает датчик (на фиг. не показан), сигнал которого поступает в
0 микроконтроллер 3, который подает команду на пневмораспр еделитель, управляющий работой пневмоцилиндра, механизма прижима 9.
Под действием пневмоцилиндра, меха.5 низма прижима 9. качающаяся планка 10 вместе с основанием реле поворачивается вокруг своей горизонтальной оси и основание реле прижимается к базовой плите 12 измерительного блока 8.
0 При установке основания реле на базовую плиту 12 (см. фиг.2 и 5), базовая поверхность А основания реле прижимается к базовой плите 12, к которой с другой стороны прижимается поверхность 20 выступа 18
5 плеча 17 толкателя, что определяет положение контактирующей поверхности 22, относительно базовой поверхности А.
Поверхность 21 ограничивается перемещением плеча 17 относительно отверстия
0 в базовой плите 12, что обеспечивает надежное контактирование с выводом основания . реле, который входит в это отверстие базовой плиты 12 и контактируете поверхностью 22 плеча 17 толкателя.
5 при возвращении подвижной каретки 24 в исходное положение последующее основание реле занимает исходную позицию, срабатывает датчик наличия основания реле и цикл повторяется.
0 После прижима качающейся планки 10 вместе с основанием реле к базовой плите 12 измерительного блока 8, измеряемые выводы основания воздействуют на контактные поверхности 22 плеч 17, подпружинен5 ных толкателей, которые постоянно прижаты к базовой плите 12 измерительного блока 8, Другим концом стержни 16 толкателей воздействуют на преобразователи 13, которые настроены по эталону на пре- дельные размеры выводов основания реле.
Если размер хотя бы одного вывода выходит за пределы поля допуска, то срабатывает один из контактов преобразователя 13, который подает сигнал на микроконтроллер 3, вырабатывающий сигнал на включение пнвмораспределителя. подающего воздух на сдув основания реле в лоток брака 26.
Если размеры всех выводов основания реле находятся в поле допуска, то по сигналу микроконтроллера включается пневмо- распределитель, подающий воздух на сдув основания реле в лоток годен 25.
Формула изобретения Автомат контроля высоты выводов основания реле, содержащий стол, на котором размещен блок управления с микроконтроллером, вибропривод с чашей-ориентато- ром и питающим лотком механизм загрузки, механизм прижима с качающейся планкой, измерительный блок, при этом последний содержит базовую плиту и преобразователь, отличающийся тем, что, с целью повышения производительности труда за счет одновременного измерения всех выводов основания, указанный измерительный
блок снабжен подпружиненными толкателями, каждый из которых выполнен с плечом и с выступом на указанном плече, и дополнительными преобразователями, при этом количество указанных основанного и
дополнительных преобразователей соответствует количеству выводов основания реле, на базовой плите выполнены сквозные отверстия, каждое из которых предназначено для одного из указанных выступов
плеч подпружиненных толкателей, каждый из подпружиненных толкателей установлен таким образом, что взаимодействует с одним из упомянутых преобразователей, а выступом своего плеча взаимодействуете
одним из выводов основания реле, указанный механизм загрузки зафиксирован на базовой плите.


| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочая головка к автомату для сборки подшипников качения | 1989 |
|
SU1677394A1 |
| Автомат для обработки и контроля деталей | 1988 |
|
SU1609539A1 |
| Многопозиционный автомат | 1983 |
|
SU1202778A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| РЕЗЬБОНАКАТНОЙ АВТОМАТ | 1992 |
|
RU2021063C1 |
| Многопозиционный сборочный автомат | 1981 |
|
SU921760A1 |
| Автомат для контроля цилиндрических изделий по наружному диаметру | 1980 |
|
SU971519A1 |
| Гайконарезной автомат | 1987 |
|
SU1540969A1 |
| РОТОРНАЯ МАШИНА СБОРКИ | 1992 |
|
RU2014195C1 |
| Устройство для контроля электрических параметров конденсаторов | 1975 |
|
SU636700A1 |


Изобретение относится к электротехнике и может быть использовано для автоматического контроля высоты выводов основания электромагнитного реле и идентичных аппаратов массового производства. Автомат контроля высоты выводов основания реле, включающий стол, на котором размещены блок управления с микроконтроллером, вибропривод с чашей-ориентатором и питающим лотком механизма прижима, измерительный блок содержит базовую плиту и преобразователь. Новым в автомате является то, что измерительный блок дополнительно содержит подпружиненный толкатель с плечом, через который пре- образователь контактирует с выводом основания реле. Количество преобразователей соответствует количеству выводов основания реле. Механизм загрузки размещен на одном уровне с питающим лотком и качающейся планкой механизма прижима. Механизм загрузки смонтирован на-базовой плите, имеющей отверстия под выступы плеч толкателей. Толкатель выпол-. нен в виде подпружиненного стержня, на одном конце которого закреплено плечо с выступом. 5 ил. ел с
Зг$::Ј3:|
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
