/
Изобретение относится к электротехнике, в частности к бесконтактным двигателям постоянного тока и может использоваться, например, в приводных электродвигателях лентопротяжного механизма магнитофона, s механизмах вращения пластинки проигрывателей, а также в системах автоматики, не допускающих неоднозначность направлений вращения двигателя.
Цель изобретения- повышение КПД путем улучшения использования меди обмоток и уменьшение пульсаций вращающегося момента.
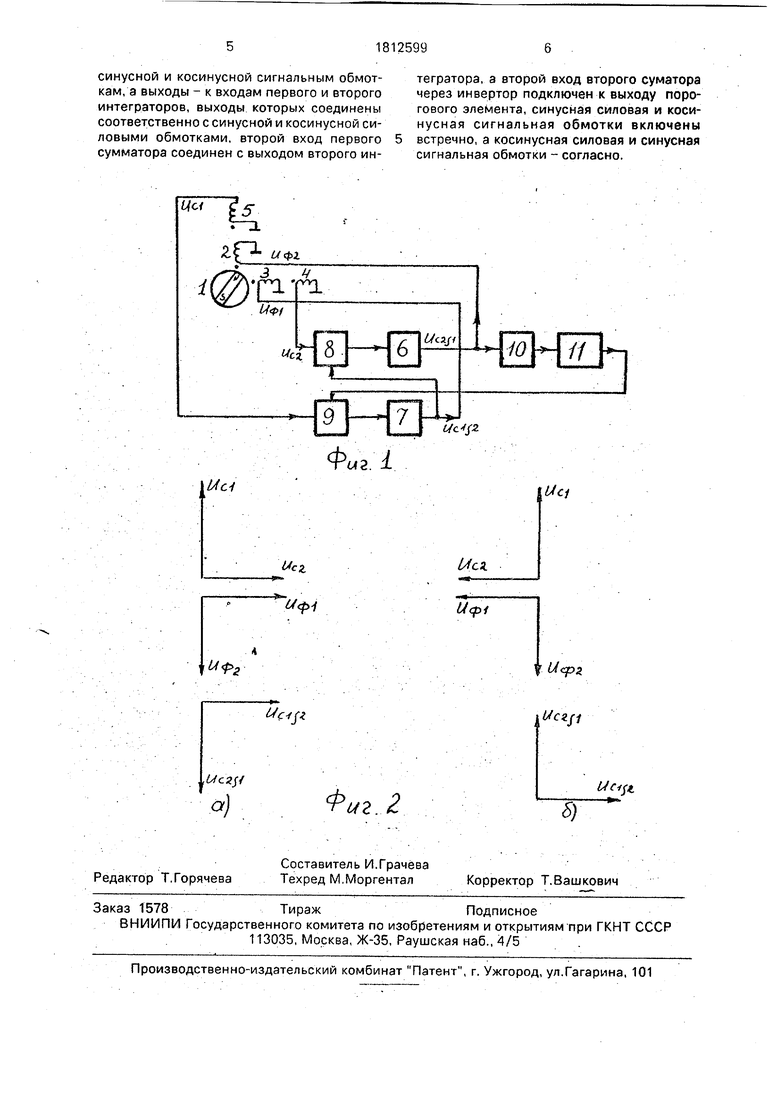
На фиг.1 изображена структурная схема вентильного электродвигателя; на фиг.2 а-б - векторные диаграммы напряжений в цепях вентильного электродвигателя, иллюстрирующие соответственно однозначность запуска и вращения в заданном направлении и невозможность запуска в другом направлении
где иф1 - напряжение косинусной силовой обмотки
иф2 - напряжение синусной силовой обмотки ......
Ud - напряжение косинусной сигнальной обмотки
Uc2 - напряжение синусной сигнальной обмотки
UC1 2 - напряжение Uci, проинтегрированное вторым интегратором
UC2 1 - напряжение Uc2, проинтегрированное первым интегратором,.
Вентильный электродвигатель содержит ротор Тс постоянными магнитами, синусную силовую обмотку 2 статора, косинусную силовую обмотку 3 статора, синусную сигнальную обмотку 4, косинусную сигнальную обмотку 5, первый и второй интеграторы 6 и 7, первый и второй сумматоры 8 и 9, пороговый блок 10, инвертор 11,
ю
Вентильный электродвигатель работает следующий образом,
Предположим, что при включении источника питания, на выходе порогового блока 10, выполненного, например, по схеме триггера Шмитта, установится низкий уровень напряжения, который инвертируясь до высокого уровня, становится близким к напряжению питания. С выхода инвертора 11 напряжение через второй сумматор 9 и второй интегратор 7 поступает на косинусную силовую обмотку 3. Одновременно напряжение с выхода второго интегратора 7 через первый сумматор 8 и.первый интегратор 6 поступает на синусную силовую обмотку 2, При этом, когда напряжение с выхода инвертора 11 поступит на второй интегратор 7, напряжение на выходе последнего начинает расти, а также начинает расти напряжение на выходе первого интегратора 6, которое поступает на вход порогового блока 10. Когда оно достигнет уровня срабатывания порогового блока 10, то он перейдет в состояние с высоким уровнем на его выходе. При этом напряжение на выходе второго интегратора Т1 будет падать, но пока оно положительно, а напряжение на выходе первого интегратора 6 продолжает расти. При переходе выходного напряжения второго интегратора 7 через ноль, напряжение на выходе первого интегратора 66 также начинает падать, и при его достижении другого уровня срабатывания порогового блока 10, последний устанавливается в состояние с низким уровнем напряжения на выходе. При этом напряжение на выходе второго интегратора 7 начинает расти, а напряжение на выходе первого интегратора 6 еще некоторое время падает до момента, когда напряжение на выходе второго интегратора 7 переходит через ноль. Затем напряжение на выходе первого интегратора б растет и в мЬментего достижения первого порога срабатывания порогового блока 10, последний устанавливается в свое первоначальное состояние и описанный процесс повторяется. Таким образом, напряжение питание на выходах интеграторов б и 7 преобразуется в синхронные переменные напряжения, фазы которых сдвинуты относительно друг друга на 90°. благодаря;т1бстуШению этих напряжений на силовые обмотки 2 и 3, появляется синхронный момент вращения и ротор I начинает вращаться. Причем встречное включение синусной силовой обмотки 2 и косинусной сигнальной обмотки б, а также согласное включение косинусной силовой обмотки 3 с синусной сигнальной обмоткой 4 позволяет исключить неправильное вращение двигателя. Из фиг.2 видно, что при
вращении ротора 1 в одном направлении, иф1 опережает 11ф2 на 90°, a UC1 опережает Uc2 90°. При этом Уфа противоположно по фазе UC1, а 1)ф1 совпадает по фазе с
5 Напряжения с сигнальных обмоток 4 и 5,
проходя через соответствующие интеграто.ры б и 7, изменяют свою фазу на 90°, а
именно, Uctf 2 совпадает по фазе с 1)ф1, a UC2j/
. совпадает по фазе с иф2, т.е. соблюдается
0 баланс фаз для возбуждения фазных сигнальных обмоток 4 и 5 и приведения ротора, 1 во вращение. Реверсионное вращение вентильного электродвигателя невозможно, т.к. при этом (см.фиг,2б) 1)ф1 противополож5 но по фазе UC1 2 и иф2 противоположно по фазе , а это тормозной режим. Следовательно , достигается однозначность направления запуска и вращения ротора 1. С началом вращения в сигнальных об0 мотках 4 и 5 наводятся ЭДС, которые соот. ветственно поступают через сумматоры 8 и
9 на соответствующие интеграторы 6 и 7,
При этом на выходах интеграторов 6 и 7
образуются синхронные сигналы, фазы ко5 торых будут сдвинуты на 90° относительно фаз сигналов соответствующих сигнальных обмоток 4 и 5, з амплитуда постоянной и не зависящей от частоты вращения ротора 1. Электродвигатель переходит в автосинх0 ронный режим, когда фаза напряжения по- . ступающего на силовую обмотку 2 и 3 совпадает с. фазой ЭДС этой же обмотки. . Момент вращения электродвигателя возрастает и он форсированно разгоняется до тех
5 пор, пока суммарные потери в двигателе станут равными его мощности.
Достоинством вентильного электродвигателя наряду с увеличением КПД, улучшением использования меди обмоток,
0 уменьшением пульсаций вращающегося момента, является, его способность к само- .... запуску при возможной несанкционированной остановки (превышение допустимой нагрузки) без дополнительного включения
5 питания,
Формула изобретения Вентильный электродвигатель, содержащий ротор с постоянными магнитами и статор с синусной и косинусной силовыми
0 обмотками, два интегратора и пороговый элемент, вход которого подключен к выходу первого интегратора, отличающийся тем, что, с целью повышения КПД путем улучшения использования меди обмоток и
5 уменьшения пульсаций вращающего момента, статор дополнительно снабжен синусной и косинусной сигнальными обмотками и введены инвертор и два сумматора, первые входы первого и второго сумматора подключены соответственно к
синусной и косинусной сигнальным обмоткам, а выходы - к входам первого и второго интеграторов, выходы которых соединены соответственно с синусной и косинусной ситегратора, а второй вход второго суматора через инвертор подключен к выходу порогового элемента, синусная силовая и косинусная сигнальная обмотки включены
левыми обмотками, второй вход первого 5 встречно, а косинусная силовая и синусная сумматора соединен с выходом второго ин- сигнальная обмотки - согласно.
тегратора, а второй вход второго суматора через инвертор подключен к выходу порогового элемента, синусная силовая и косинусная сигнальная обмотки включены
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1642558A1 |
| СПОСОБ БЕЗДАТЧИКОВОЙ ОЦЕНКИ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА МНОГОФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2428784C1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Датчик положения вентильного двигателя | 1989 |
|
SU1744768A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
Использование: в лентопротяжных механизмах магнитофона, проигрывателях и в системах автоматики. Сущность: вентильный электродвигатель снабжен синусной и косинусной сигнальными обмотками, которые в работе, встречно включаясь с соответствующими силовыми обмотками, позволяют исключить направленное вращение электродвигателя. Кроме того, в режиме пуска обеспечивается автосинхронный режим, что приводит к форсированному разгону Электродвигателя до тех пор, пока суммарные потери в нем становятся равными его мощности. 2 ил.
Фиг. 1.
lA-ci
Uci
Ыф
2
tScift
Ucj
Мея.
Ucpi
Ucps.
.//«//
| 1972 |
|
SU416807A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Управляемый вентильный электродвигатель | 1988 |
|
SU1693706A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электродвигатель | 1984 |
|
SU1210187A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
