10
15
11393628
Изобретение относится к машиностроению и может быть использовано в захватных органах промышленных роботов-манипуляторов.
Целью изобретения является повьше- ние надежности.охвата за счет обеспечения регулировки жесткости губок.
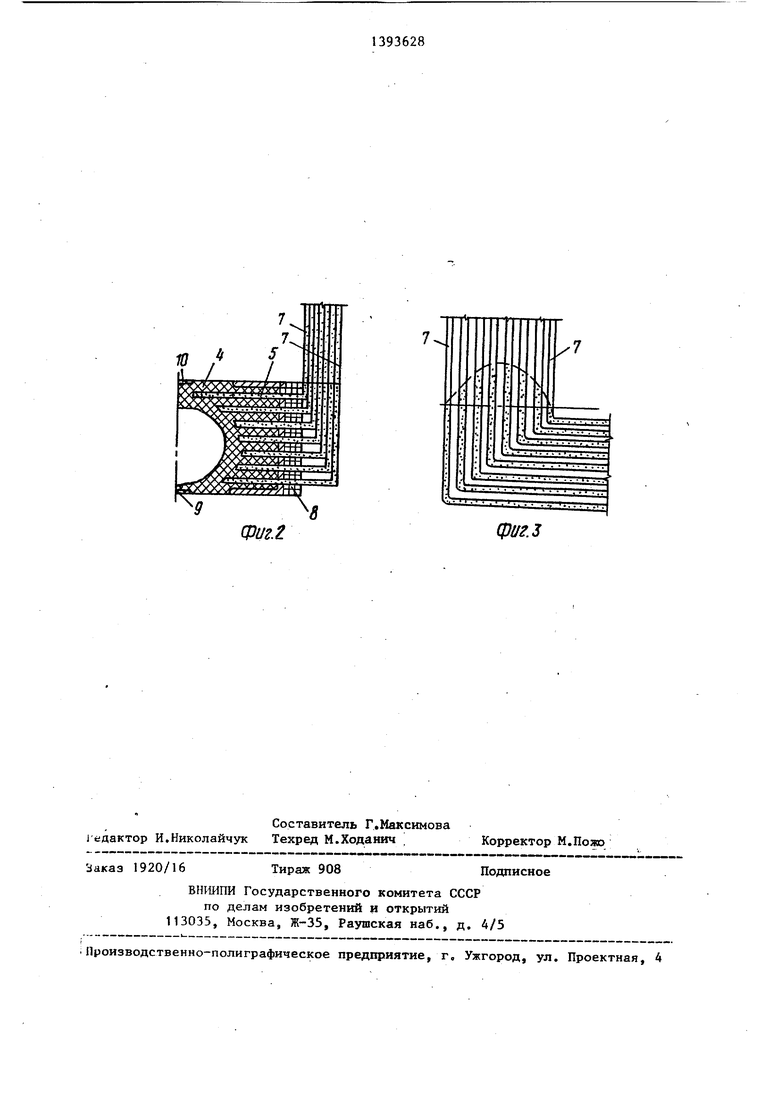
На фиг. 1 изображен охват с сообающимися между собой каналами обвдтй
6ид;|На фиг. 2 - то же, с изолированными каналами; на. фиг. 3 - измене- ние уровня ферромагнитной пасты при захвате объекта.
Схват содержит корпус 1, рычаги 2 и 3, эластичные губки 4, внутри которых выполнены каналы: 5, сообщающиеся между собой через коллектор 6, соединенный с датчиком уровня ферромагнитной пасты, выполненным в виде трубки 7, внутренняя поверхность которой покрыта электропроводящим материалом. Каналы 5 заполнены ферромагнитной
пастой. На губках 4 установлены регулируемые источники 8 магнитного поля
и датчики 9 и 10 усилия сжатия..
Схват работает следующим образом. Предмет неопределенной формы, объем которого меньше суммарного объема каналов 5, размещается между губками 4. Электропривод, установленный на кЬрпусе 1, перемещает губки до их соприкосновения. О соприкосновении губок сигнализируют датчики 9 и 10 усилия сжатия. При этом из каналов 5 вытесняется ферромагнитная паста , в трубку 7. После соприкосновенна
губок включается источник 8 магнитного поля, ферромагнитная паста затвердевает, обеспечивая необходимую
жесткость губок. Об образе захваченного предмета свидетельствует объем ферромагнитной пасты, вытесненной в трубку 7, информация о котором поступает в систему управления (не показана) , где она сравнивается с ине- ющимися в памяти образами.
20
25
30
35
40
45
тр
5
0
5
0
5
0
5
Для определения массы предмета робот слегка приподнимает его. Если предмет схвачен ненадежно, то он пытается выскользнуть, при этом замыкается датчик, 9„ Тогда система управления дает команду на увеличение напряженности магнитного поля. Если датчик 9 не размыкается, то система управления сравнивает полученнзло информацию о напряженности магнитного поля, соответствующей массе предме- . та, с имеющейся в ее памяти, определяет предмет, находящийся в схвате, и дает исполнительную комчнду на его перемещение.
Возможен вариант выполнения схва- та, при котором каналы 5 выполнены изолированными друг от друга и каждый кайал 5 связан с соответствующей трубкой 7.
Формула изобретения
1.Схват, содержащий корпус, на котором установлены губки с приводом их перемещения, причем в губках вы- j полнены сообщающиеся между собой ка- налы, расположенные перпендикулярно рабочей поверхности губок, при этом на губках установлены датчики усилия сжатия, связанные с системой управления, отличающийся те, что, с целью повьщзенйя надежности каналы заполнены ферромагнитной пастой, а на губках установлены источник магнитного поля и датчики уровня ферромагнитной пасты, соединенные с каналами и с системой управления и выполнен- нь:е в виде трубок, внутренняя пове|5х- ность которых покрыта электропроводящим материалом.
2.Схват по п. 1, отлич аю- щ и и с я тем, что .каналы вьтолнены изолированными друг от друга, а каждый канал связан с соответствующей трубкой.Фиг.
/
фи.з
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1192970A1 |
| Схват промышленного робота | 1983 |
|
SU1085810A1 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Схват промышленного робота | 1983 |
|
SU1093545A1 |
| Схват робота | 1986 |
|
SU1445949A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват манипулятора | 1984 |
|
SU1323376A1 |
Изобретение относится к области машиностроения и может быть использовано в захватных органах промышленных роботов-манипуляторов. Целью изобретения является повьш1ение надеж ности охвата за счет обеспечения регулировки жесткости губок. Каналы 5 выполнены в губках 4 и заполнены фер ромагнитной пастой. На губках 4 уста новлены регулируемые источники магнитного поля 8 и датчики усилия сжатия - 9 и 10. Каналы 5 сообщаются между собой и соединены с датчиком уров ня ферромагнитной пасты, вьтолненным в виде трубки 7. Внутренняя поверхность трубки 7 покрыта электропроводящим материалом. При обжатии захватываемого объекта ферромагнитная паста из каналов 5 вытесняется в трубки 7. После соприкосновения губок 4 включается источник магнитного поля 8, при зтом -ферромагнитная паста затвердевает, обеспечивая необходимую жесткость губок. По объему вытесненной ферромагнитной дзеты системой управления определяется образ захваченного предмета, а по сигналам с датчиков усилия сжатия 9 и 10 - напряженность магнитного поля,соответствующая массе . предмета. Система управления сравнивает полученную информацию с имеющейся в ее памяти, определяет предмет, находящийся в схвате, и дает исполнительную команду на его перемещение. 1 з.п. ф-лы, 3 ил. i О) СА) ;0 ОЭ 00
Составитель Г.Максимова i едактор И.Николайчук Текред М.Ходанич ,
Заказ 1920/16
Тираж 908
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Корректор М.Поаю
Подписное
| Схват промышленного робота | 1983 |
|
SU1085810A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
